- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Вимірювання рівнів.
Вимірювання рівнів наповнення рідин у різних резервуарах та баках займають значне місце в різних галузях промисловості, науки та техніки.
Основними групами рівнемірів є:
־ візуальні (за допомогою водомірного скла);
־ гідростатичні, в яких рівень визначають за значенням тиску рідини на дно резервуара наступним вимірюванням різниці даного тиску та атмосферного за допомогою диференціального манометра;
־ механічні та електромеханічні, (поплавкові та буйкові);
־ електричні, в яких рівень перетворюється в зміну електричного опору (кондуктометричні) або в зміну ємності (ємнісні).
Розглянемо деякі найпоширеніші типи рівнемірів, що застосовуються в промисловості.
Поплавкові рівнеміри. Принцип роботи поплавкових рівнемірів оснований на відсліджуванні рівня рідини за допомогою поплавка. Поплавок, маючи питому густину, значно меншу, ніж рідина, завжди знаходиться на її поверхні і переміщується з переміщенням вимірюваного рівня рідини. Переміщення поплавка перетворюється у вихідний сигнал відлікових пристроїв, що може здійснюватись як за допомогою звичайних механічних пристроїв, так і з перетворенням переміщення в електричний сигнал за допомогою різних вимірювальних перетворювачів.
 Найпростішими є механічні рівнеміри, в яких поплавок підвішений на мірній стрічці. При зміні рівня рідини та відповідному переміщенні мірної стрічки, яка має перфорацію, стрічка входить у зчеплення з виступами мірного шківа механічного відлікового пристрою. Відліковий механізм - це десятковий лічильник з ціною найменшої поділки 1 мм. Застосовуються такі рівнеміри для вимірювань рівнів рідких нафтопродуктів.
Найпростішими є механічні рівнеміри, в яких поплавок підвішений на мірній стрічці. При зміні рівня рідини та відповідному переміщенні мірної стрічки, яка має перфорацію, стрічка входить у зчеплення з виступами мірного шківа механічного відлікового пристрою. Відліковий механізм - це десятковий лічильник з ціною найменшої поділки 1 мм. Застосовуються такі рівнеміри для вимірювань рівнів рідких нафтопродуктів.
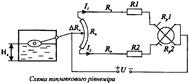 Принципова схема поплавкового рівнеміра з реостатним перетворювачем переміщення та логометричним вимірювальним приладом. Поплавок розміщений в баку з досліджуваним рівнем і механічно зв’язаний з повзунком реостатного перетворювача
Принципова схема поплавкового рівнеміра з реостатним перетворювачем переміщення та логометричним вимірювальним приладом. Поплавок розміщений в баку з досліджуваним рівнем і механічно зв’язаний з повзунком реостатного перетворювача  . Резистори
. Резистори  та
та  служать для узгодження параметрів перетворювача та логометра для забезпечення заданого діапазону вимірювань.
служать для узгодження параметрів перетворювача та логометра для забезпечення заданого діапазону вимірювань.
При зміні досліджуваного рівня та відповідному переміщенні поплавка повзунок реостатного перетворювача, змінюючи співвідношення опорів у колах рамок логометра, змінює і відношення струмів, а тим самим відхилення  стрілки та покази логометра:
стрілки та покази логометра:
 .
.
Шкала таких рівнемірів градуюється в значеннях вимірюваного рівня або в частках максимального рівня, прийнятого за одиницю.
Вторинними перетворювачами поплавкових рівнемірів можуть бути також індуктивні чи взаємоіндуктивні перетворювачі переміщень.
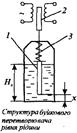 Буйкові рівнеміри. Їх робота базується на використанні виштовхувальної сили, що діє на занурене у рідину тіло (буйок) у вигляді циліндра, довжина якого значно більша від його діаметра, а питома густина значно більша під питомої густини досліджуваної рідини. Такий буйок механічно з’єднаний з чутливим елементом 2 вторинного перетворювача, а його переміщення обмежується за допомогою пружини 3, закріпленої одним кінцем до верхньої частини буйка, а другим до нерухомої частини перетворювача. Залежно від рівня рідини на буйок буде діяти підйомна сила, внаслідок чого пружина стискається, а чутливий елемент - плунжер індуктивного чи взаємоіндуктивного перетворювача, переміщується, змінюючи відповідно вихідну індуктивність (повний електричний опір) чи вихідну ЕРС.
Буйкові рівнеміри. Їх робота базується на використанні виштовхувальної сили, що діє на занурене у рідину тіло (буйок) у вигляді циліндра, довжина якого значно більша від його діаметра, а питома густина значно більша під питомої густини досліджуваної рідини. Такий буйок механічно з’єднаний з чутливим елементом 2 вторинного перетворювача, а його переміщення обмежується за допомогою пружини 3, закріпленої одним кінцем до верхньої частини буйка, а другим до нерухомої частини перетворювача. Залежно від рівня рідини на буйок буде діяти підйомна сила, внаслідок чого пружина стискається, а чутливий елемент - плунжер індуктивного чи взаємоіндуктивного перетворювача, переміщується, змінюючи відповідно вихідну індуктивність (повний електричний опір) чи вихідну ЕРС.
Функцію перетворення буйкового перетворювача можна визначити, виходячи з таких положень. При зануренні буйка в досліджувану рідину на нього буде діяти виштовхувальна сила:  ,
,
де Н - рівень рідини; х - переміщення буйка; S - площа поперечного перерізу буйка; ρp - питома густина рідини; g - земне прискорення.
Сила пружності пружини змінилися на величину Fпр=Wx, де W -штивність пружини. Прирівнявши ці дві сили, одержимо  .
.
 Буйковий рівнемір з компенсаційним вимірювальним колом з диференціально - трансформаторними перетво-рювачами.
Буйковий рівнемір з компенсаційним вимірювальним колом з диференціально - трансформаторними перетво-рювачами.
Буйкові та поплавкові рівнеміри з силовою компенсацією, та статичного зрівноважувального перетворення.
 Вихідною величиною в таких вимірювачах є струм. Принцип дії рівнемірів зрівноважу-вального перетворення. При зануренні буйка в досліджувану рідину на нього буде діяти виштовхувальна сила
Вихідною величиною в таких вимірювачах є струм. Принцип дії рівнемірів зрівноважу-вального перетворення. При зануренні буйка в досліджувану рідину на нього буде діяти виштовхувальна сила  , що приводить до переміщення буйка, яке за допомогою коромисла перетворюється в поворот осердя диференціально-трансформаторного перетворювача. Нерухома частина магнітопроводу виконана у вигляді Ш-подібного осердя. На середньому його стержні намотана первинна намагнічуюча обмотка, що живиться від джерела змінної напруги. Дві ідентичні вимірювальні обмотки, намотані на крайні стержні, утворюють два ідентичні перетворювальні елементи. Обмотки з’єднані послідовно і зустрічно.
, що приводить до переміщення буйка, яке за допомогою коромисла перетворюється в поворот осердя диференціально-трансформаторного перетворювача. Нерухома частина магнітопроводу виконана у вигляді Ш-подібного осердя. На середньому його стержні намотана первинна намагнічуюча обмотка, що живиться від джерела змінної напруги. Дві ідентичні вимірювальні обмотки, намотані на крайні стержні, утворюють два ідентичні перетворювальні елементи. Обмотки з’єднані послідовно і зустрічно.
Диференціально - трансформаторний перетворювач побудований так, що при нульовому значенні вимірюваного рівня рухоме осердя займає симетричне щодо обох перетворювальних елементів положення, наведені в них ЕРС будуть однаковими, а їх різниця дорівнюватиме нулю. Зі зміною вимірюваного рівня і відповідним переміщенням рухомого осердя змінюються потоки в окремих перетворювальних елементах і наведені в них ЕРС. З’являється деяка різниця ЕРС, яка подається на підсилювач, вихідна напруга якого після перетворення змінного струму в постійний подається до вимірювальної обмотки зворотного магнітоелектричного перетворювача.
Струм  , що проходить через вимірювальну обмотку, взаємодіючи з полем постійного магнігу, створює компенсуючу силу
, що проходить через вимірювальну обмотку, взаємодіючи з полем постійного магнігу, створює компенсуючу силу  , спрямовану назустріч силі . Струм, що протікатиме в момент рівноваги цих сил, буде мірою вимірюваного рівня.
, спрямовану назустріч силі . Струм, що протікатиме в момент рівноваги цих сил, буде мірою вимірюваного рівня.
Ємнісні рівнеміри відрізняються універсальністю, високою чутливістю, простотою вимірювального кола, відсутністю рухомих елементів в зоні вимірюваного рівня (опис установки приведений в лабораторній роботі).
ВИМІРЮВАННЯ МЕХАНІЧНОГО ЗУСИЛЛЯ
Із механічних величин основними є механічні зусилля, які поділяються на:
־ зосереджені зусилля - спрямовані лінійно (механічні сили) та обертові (крутні моменти),
־ розподілені зусилля - зовнішні (тиск) та внутрішні (механічні напруження).
Методи вимірювання механічних зусиль можна поділити на чотири групи, що базуються на вимірюванні:
1. деформацій досліджуваного об’єкта або деформації пружного елемента, які виникають під дією вимірюваного зусилля; застосовується для визначення механічних напружень вимірюванням деформацій поверхні досліджуваного об’єкта, а також у приладах для вимірювання сил, крутних моментів та тиску, що попередньо перетворюються в деформацію первинного пружного перетворювального елемента;
2. параметрів або властивостей перетворювачів (електричний чи магнітний опір, виникнення електричного заряду тощо), що змінюються під дією досліджуваних зусиль; використовується у засобах вимірювань, основаних на застосуванні п’єзоелектричних та магнітопружних перетворювачів, безпосередньою вихідною величиною яких є досліджуване зусилля;
3. безпосередньо властивостей досліджуваного об’єкта чи середовища (швидкості розповсюдження звуку, теплопровідності газу, електричної провідності, магнітної проникності тощо), які залежать від зусиль, що діють на них; це ультразвуковий, магнітопружний, термопружний та інші методи вимірювань механічних напружень;
4. зусиль методом зрівноважувального перетворення, при якому вимірюване зусилля зрівноважується компенсуючим зусиллям; використовується для побудови точних засобів вимірювань сил, крутних моментів, тиску.
Визначення механічних напружень шляхом вимірювання деформації поверхні досліджуваного об’єкта. Найпростішим та найпоширенішим методом вимірювань деформацій є тензометричний метод, в якому первинним перетворювачем деформації є тензорезистори, які наклеюють на досліджувану деталь.
 Прилад для вимірювання зусилля показано на рис. а. Під впливом зусилля мембрана прогина-ється, і її деформацію сприймає кільцевий фольговий тензо-резистор (рис. б). Вимірювальна схема - зрівноважений міст (рис. в). Недоліком цієї схеми є температурна похибка; внаслідок змін температури опір тензорезистора теж змінюється, а це сприймається як зміни
Прилад для вимірювання зусилля показано на рис. а. Під впливом зусилля мембрана прогина-ється, і її деформацію сприймає кільцевий фольговий тензо-резистор (рис. б). Вимірювальна схема - зрівноважений міст (рис. в). Недоліком цієї схеми є температурна похибка; внаслідок змін температури опір тензорезистора теж змінюється, а це сприймається як зміни  , хоча значення залишається таким самим.
, хоча значення залишається таким самим.
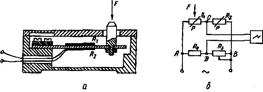 Для зменшення температурної похибки використовують схему з двома тензорезисторами (рис. а), причому опір , одного збільшується, опір іншого зменшується; тому їх доцільно ввімкнути в суміжні плечі моста (рис. б). Температурна похибка зникає, оскільки опори та за коливань температури змінюються однаково (і за значенням, і за знаком). У вимірювальній діагоналі - електромеханічний осцилограф.
Для зменшення температурної похибки використовують схему з двома тензорезисторами (рис. а), причому опір , одного збільшується, опір іншого зменшується; тому їх доцільно ввімкнути в суміжні плечі моста (рис. б). Температурна похибка зникає, оскільки опори та за коливань температури змінюються однаково (і за значенням, і за знаком). У вимірювальній діагоналі - електромеханічний осцилограф.
Температурної похибки немає й у схемі з використанням чотирьох однакових тензорезисторів (рис. а). Ця система призначена для контролю натягу нитки в 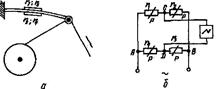 технологічній машині. Під натягом нитки вигинається пружна консоль, деформація якої вимірюється за допомогою чотирьох дротяних або фольгових тензорезисторів (згори
технологічній машині. Під натягом нитки вигинається пружна консоль, деформація якої вимірюється за допомогою чотирьох дротяних або фольгових тензорезисторів (згори  та
та  , знизу
, знизу  та
та  ), ввімкнених у незрівноважену мостову схему (рис. б). Напругу нерівноваги реєструє електромеханічний осцилограф.
), ввімкнених у незрівноважену мостову схему (рис. б). Напругу нерівноваги реєструє електромеханічний осцилограф.
Вимірювання механічних сил та тиску. Принцип дії силовимірювальних пристроїв (динамометрів) оснований на методі перетворення вимірюваної сили в механічні напруження в матеріалі пружного перетворювального елемента і його деформацію, які за допомогою тензорезистивних, індуктивних, п’єзоелектричних, магнітопружних чи інших вторинних перетворювачів перетворюються в електричний сигнал або зміну вихідного електричного параметра.
Як первинні перетворювачі можуть використовуватись стержневі пружні елементи, пружні кільця, балкові пружні елементи. Вторинними перетворювачами динамометрів з механічними пружними перетворювачами сили в деформацію є тензорезистивні перетворювачі, а вимірювальні кола - мостові.
Динамометри з магнітопружним перетворювальним елементом відрізняються простотою конструкції, високою надійністю, значною потужністю вхідного сигналу. Магнітопружні перетворювачі виготовляють, переважно, диференціальними. Один з перетворювальних елементів є робочим, а ідентичний йому інший перетворювальний елемент, на який не діють вимірювальні зусилля, служить для компенсації початкової індуктивності робочого перетворювального елемента, а також для компенсації впливу зовнішніх чинників, зокрема температури довкілля, частоти джерела живлення.
Основою п’єзоелектричних динамометрів є п’єзоелектричні перетворювачі сили в електричний заряд. Недоліком є надзвичайно мала вихідна потужність при великому опорі п’єзодавача, що в свою чергу вимагає використання високочутливих підсилювачів з дуже великим вхідним опором. Тому в п’єзодинамометрах використовують підсилювачі заряду, що дає змогу тривало підтримувати значення вихідного сигналу і дає можливість створити п’єзодинамометри для вимірювань сталих сил. До переваг п’єзодинамометрів належить їх висока чутливість, висока швидкодія.
Значна частина методів вимірювання тисків основана на попередньому перетворенні тиску в механічне напруження, деформацію чи переміщення за допомогою пружних перетворювальних елементів з наступним вимірюванням механічного напруження, деформації чи переміщення.
Вимірювачі тиску газів і рідин – це манометри, але серед них виділяють барометри - вимірювачі атмосферного тиску, вакуумметри - вимірювачі розрідження, дифманометри - вимірювачі різниці тиску і ін.
За принципом дії манометри поділяються на рідинні, пружинні і електричні.
У рідинних манометрах вимірюваний тиск зрівноважується стовпом рідини, висота якого виражає значення тиску відповідно до формули  , де Р - тиск; γ - питома вага рідини; Н - висота стовпа рідини.
, де Р - тиск; γ - питома вага рідини; Н - висота стовпа рідини.
 На рис. показаний рідинний дифманометр. Висота підйому рідини в трубці визначається різницевим тиском в трубці Р1 і чашці Р2. (якщо у верхній частині трубки вакуум (Р2=0), то маємо манометр абсолютного тиску, а якщо, крім того, Р1 - атмосферний тиск, то маємо барометр).
На рис. показаний рідинний дифманометр. Висота підйому рідини в трубці визначається різницевим тиском в трубці Р1 і чашці Р2. (якщо у верхній частині трубки вакуум (Р2=0), то маємо манометр абсолютного тиску, а якщо, крім того, Р1 - атмосферний тиск, то маємо барометр).
У пружинних манометрах вимірюваний тиск зрівноважується силою пружності трубчастої пружини, мембрани або сильфону. При цьому відбувається перетворення тиску в переміщення вільного кінця пружини, центру мембрани або дна сильфону. Індикація цього переміщення можлива механічна, шляхом його посилення за допомогою зубчатого для важеля механізму або електрична, після перетворення переміщення в електричну величину.
 Схема пристрою трубчастого механічного манометра приведена на рис. При підвищенні тиску в трубчастій пружині вона розкручується, приводячи в рух стрільку покажчика.
Схема пристрою трубчастого механічного манометра приведена на рис. При підвищенні тиску в трубчастій пружині вона розкручується, приводячи в рух стрільку покажчика.
У мембранному манометрі переміщення центру мембрани перетвориться в переміщення стрілки покажчика або в електричну величину, наприклад опір, індуктивність або ємність. Деформацію мембрани може сприймати п’єзо- або тензоперетворювач.
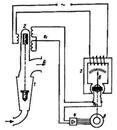
 Електричні манометри. Для вимірювань тиску з попереднім його перетворенням в переміщення широко застосовуються прилади з диференціально-трансформаторними вимірювальними колами. На рис. наведена спрощена схема манометра з первинним перетворювачем тиску в переміщення у вигляді одновиткової трубчатої пружини (трубки Бурдона) та вторинного приладу КСД. Переміщення вільного кінця трубки Бурдона, пропорційне до вимірюваного тиску, передається рухомому осердю вхідного диференціально-трансформаторного перетворювача ДТП-1. Прилад КСД містить також аналогічний вхідному компенсувальний диференціально-трансформаторний перетворювач ДТП-2, осердя якого переміщається за допомогою профільного кулачкового механізму КМ, механічно зв’язаного з віссю реверсивного двигуна РД, а також електронний фазочутливий підсилювач. З віссю обертання кулачкового механізму також механічно зв’язана стрілка відлікового пристрою ВдП. Обмотки збудження ДТП-1 та ДТП-2 з’єднані послідовно і живляться від спільного джерела змінної напруги. Вихідні обмотки ДТП увімкнені послідовно і зустрічно.
Електричні манометри. Для вимірювань тиску з попереднім його перетворенням в переміщення широко застосовуються прилади з диференціально-трансформаторними вимірювальними колами. На рис. наведена спрощена схема манометра з первинним перетворювачем тиску в переміщення у вигляді одновиткової трубчатої пружини (трубки Бурдона) та вторинного приладу КСД. Переміщення вільного кінця трубки Бурдона, пропорційне до вимірюваного тиску, передається рухомому осердю вхідного диференціально-трансформаторного перетворювача ДТП-1. Прилад КСД містить також аналогічний вхідному компенсувальний диференціально-трансформаторний перетворювач ДТП-2, осердя якого переміщається за допомогою профільного кулачкового механізму КМ, механічно зв’язаного з віссю реверсивного двигуна РД, а також електронний фазочутливий підсилювач. З віссю обертання кулачкового механізму також механічно зв’язана стрілка відлікового пристрою ВдП. Обмотки збудження ДТП-1 та ДТП-2 з’єднані послідовно і живляться від спільного джерела змінної напруги. Вихідні обмотки ДТП увімкнені послідовно і зустрічно.
Оскільки секції вихідних обмоток обох ДТП увімкнені послідовно та зустрічно, то результівні ЕРС на вході ДТП дорівнюватимуть:  .
.
Якщо положення рухомих осердь вхідного та компенсувального перетворювачів будуть різними, то різними будуть також  та
та  , а, отже,
, а, отже,  та
та  , а на вхід електронного підсилювача ЕП буде прикладена напруга:
, а на вхід електронного підсилювача ЕП буде прикладена напруга:  .
.
Підсилений різницевий сигнал  подається на обмотку керування реверсивного двигуна РД і викликає обертання його ротора в такому напрямку, щоб переміщення осердя компенсувального ДТП-2 викликало зменшення різницевої напруги ажпоки вона дорівнюватиме нулеві.
подається на обмотку керування реверсивного двигуна РД і викликає обертання його ротора в такому напрямку, щоб переміщення осердя компенсувального ДТП-2 викликало зменшення різницевої напруги ажпоки вона дорівнюватиме нулеві.
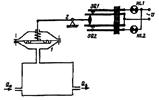
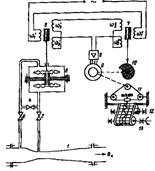
 Систему дистанційного вимірювання тиску газу в резервуарі показано на рис.: 1 - манометричний трубчастий перетворювач; 2 - зубчаста передача; 3 - трансформаторний перетворювач із поворотною котушкою; 4 - містковий випрямляч; V - вольтметр магнітоелектричної системи. Внаслідок підвищення тиску в резервуарі частково розпрямляється манометрична трубка, зубчастий сектор повертається на певний кут за годинниковою стрілкою, ведена шестірня повертається проти годинникової стрілки; її рух передається на рамку трансформаторного перетворювача, в якій з’являється вторинна напруга; ця напруга через випрямляч вимірюється вольтметром, шкалу якого доцільно градуювати в одиницях тиску.
Систему дистанційного вимірювання тиску газу в резервуарі показано на рис.: 1 - манометричний трубчастий перетворювач; 2 - зубчаста передача; 3 - трансформаторний перетворювач із поворотною котушкою; 4 - містковий випрямляч; V - вольтметр магнітоелектричної системи. Внаслідок підвищення тиску в резервуарі частково розпрямляється манометрична трубка, зубчастий сектор повертається на певний кут за годинниковою стрілкою, ведена шестірня повертається проти годинникової стрілки; її рух передається на рамку трансформаторного перетворювача, в якій з’являється вторинна напруга; ця напруга через випрямляч вимірюється вольтметром, шкалу якого доцільно градуювати в одиницях тиску.
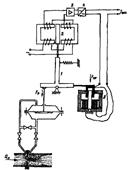
 Схему дистанційного вимірювання тиску рідини за допомогою сильфонного перетворювача та вторинного перетворювача ДСП наведено на рис.: 1 - важіль; 2 - диференціальний трансфор-маторний перетворювач; 3 - підсилювач; 4 - перетворювач змінного струму на постійний; 5 - лінійний магнітоелектричний перетворювач; 6 - міліамперметр магнітоелектричної системи. Внаслідок зміни тиску від норми до максимального значення струм змінюватиметься в межах від нуля до 20 мА.
Схему дистанційного вимірювання тиску рідини за допомогою сильфонного перетворювача та вторинного перетворювача ДСП наведено на рис.: 1 - важіль; 2 - диференціальний трансфор-маторний перетворювач; 3 - підсилювач; 4 - перетворювач змінного струму на постійний; 5 - лінійний магнітоелектричний перетворювач; 6 - міліамперметр магнітоелектричної системи. Внаслідок зміни тиску від норми до максимального значення струм змінюватиметься в межах від нуля до 20 мА.
 Вимірювальну систему з реєстрацією тиску показано на рис.: 1 - манометричний трубчастий перетворювач; 2, 3 - відповідно первинний і вторинний диференціальні трансформаторні перетворювачі (датчик і приймач); 4 - підсилювач змінного струму; 5 - сервоелектродвигун; 6 - покажчик та реєструвальний пристрій. Коли котушка датчика відхиляється від положення на вхід підсилювача надходить різницева напруга; сервоелекгродвигун починає працювати, примушуючи котушку приймача зайняти таке положення, в якому перебуває котушка датчика. При цьому вторинна напруга приймача зрівнюється з вторинною напругою датчика, різницева напруга зникає, електродвигун зупиняється. Кожному значенню вимірюваного тиску відповідає певне усталене положення ротора серводвигуна, що фіксує покажчик та реєструвальний пристрій.
Вимірювальну систему з реєстрацією тиску показано на рис.: 1 - манометричний трубчастий перетворювач; 2, 3 - відповідно первинний і вторинний диференціальні трансформаторні перетворювачі (датчик і приймач); 4 - підсилювач змінного струму; 5 - сервоелектродвигун; 6 - покажчик та реєструвальний пристрій. Коли котушка датчика відхиляється від положення на вхід підсилювача надходить різницева напруга; сервоелекгродвигун починає працювати, примушуючи котушку приймача зайняти таке положення, в якому перебуває котушка датчика. При цьому вторинна напруга приймача зрівнюється з вторинною напругою датчика, різницева напруга зникає, електродвигун зупиняється. Кожному значенню вимірюваного тиску відповідає певне усталене положення ротора серводвигуна, що фіксує покажчик та реєструвальний пристрій.
Систему автоматичної сигналізації відхилень тиску газу від певної норми зображено на рис. Унаслідок підвищення тиску мембрана 1 прогинається вгору, важіль 2 замикає контакт SQ2, і спалахує сигнальна лампа НL2. Очевидно, що зниження тиску порівняно з нормою примусить засвітитися лампу НL1.

 Іншу конструкцію автоматичного сигналізатора тиску газу показано на рис. а: під тиском газу перемішується вгору денце сильфона 1, шток 2 повертається за годинниковою стрілкою, замикаючи контактний пристрій 5; регулюванням натягу пружини 3 можна змінювати значення тиску, за якого спрацьовує контактний пристрій (4 - регулювальний гвинт уставки сигналізатора).
Іншу конструкцію автоматичного сигналізатора тиску газу показано на рис. а: під тиском газу перемішується вгору денце сильфона 1, шток 2 повертається за годинниковою стрілкою, замикаючи контактний пристрій 5; регулюванням натягу пружини 3 можна змінювати значення тиску, за якого спрацьовує контактний пристрій (4 - регулювальний гвинт уставки сигналізатора).
ВИМІРЮВАННЯ ВИТРАТ
Головними параметрами руху потоків рідини та газоподібних речовин є такі витрати, як кількість речовини, що протікає через переріз трубопроводу за одиницю часу, та загальна кількість перенесеної речовини (повні витрати).
Розрізняють такі види витрат: об’ємні витрати  (тут
(тут -об’єм,
-об’єм,  -час) та масові витрати
-час) та масові витрати  , де М – маса речовини. Співвідношення між масовими та об’ємними витратами визначається залежністю
, де М – маса речовини. Співвідношення між масовими та об’ємними витратами визначається залежністю  , де
, де  - густина речовини. Одиницями об’ємних витрат можуть бути м3/с, м3/год, л/с, а масовими – кг/с, кг/год тощо.
- густина речовини. Одиницями об’ємних витрат можуть бути м3/с, м3/год, л/с, а масовими – кг/с, кг/год тощо.
Прилади для вимірювань витрат називаються витратомірами, а для вимірювання кількості речовини – лічильниками.
Існує велике різноманіття методів вимірювань та конструктивних різновидів витратоміри і лічильників. Найпоширенішими є витратоміри змінного перепаду тисків із завужувальними пристроями, сталого перепаду тиску з перетворенням витрат в силу або переміщення, тахометричні, теплові, індукційні витратоміри.
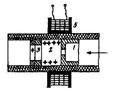
Для вимірювання витрати можна застосовувати витратоміри, в яких втрата визначається за значенням переміщення тіла, розташованого в потоці речовини: 1 - діафрагма, яка переміщується під напором потоку; 2 - пружина; 3- гайка; 4 - контргайка; 5 - котушка). Діафрагму виготовлено з магнітом’якої сталі, тому її переміщення спричиняє зміни індуктивності котушки; вимірюючи зміни індуктивності, можна діставати інформацію про зміни витрати речовини.
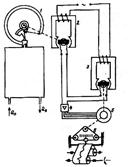
 Система для вимірювання витрати в трубопроводі. Первинним перетворювачем є нормальна труба Вентурі 1; перепад тиску вимірює мембранний диференціальний манометр 5. Внутрішні порожнини мембранних коробок з’єднані між собою й заповнені дистильованою водою. Для налагодження витратоміра використовуються вентилі: 4 - зрівняльний, 2 та 3 - замикальні. Спочатку всі три вентилі мають бути закриті; потім слід відкрити зрівняльний вентиль (щоб запобігти пошкодженню мембран від тиску речовини в трубопроводі), після цього відкрити обидва замикальних, нарешті закрити зрівняльний і розпочати вимірювання. Передачу вимірювальної інформації на потрібну відстань здійснює система з двома диференціальними трансформаторними перетворювачами соленоїдного типу (6 і 7 - перетворювачі, 8 - підсилювач, 9 - сервоелектродвигун, 10 - ексцентрик, 11 - реєструвальний пристрій, 12 та 13 - рулонний папір для реєстрації результатів вимірювання).
Система для вимірювання витрати в трубопроводі. Первинним перетворювачем є нормальна труба Вентурі 1; перепад тиску вимірює мембранний диференціальний манометр 5. Внутрішні порожнини мембранних коробок з’єднані між собою й заповнені дистильованою водою. Для налагодження витратоміра використовуються вентилі: 4 - зрівняльний, 2 та 3 - замикальні. Спочатку всі три вентилі мають бути закриті; потім слід відкрити зрівняльний вентиль (щоб запобігти пошкодженню мембран від тиску речовини в трубопроводі), після цього відкрити обидва замикальних, нарешті закрити зрівняльний і розпочати вимірювання. Передачу вимірювальної інформації на потрібну відстань здійснює система з двома диференціальними трансформаторними перетворювачами соленоїдного типу (6 і 7 - перетворювачі, 8 - підсилювач, 9 - сервоелектродвигун, 10 - ексцентрик, 11 - реєструвальний пристрій, 12 та 13 - рулонний папір для реєстрації результатів вимірювання).
Оскільки об’ємна витрата  виражається формулою:
виражається формулою:  , диференціальні манометри забезпечуються різними пристроями для добування кореня. Для цього можна використати вторинний перетворювач ДСП, якщо в ньому замість магнітоелектричного перетворювача застосувати феродинамічний. Як відомо, у феродинамічному перетворювачі тягове зусилля пропорційне добутку струмів у його котушках; якщо ж котушки з’єднані послідовно, то зусилля пропорційне квадрату струму.
, диференціальні манометри забезпечуються різними пристроями для добування кореня. Для цього можна використати вторинний перетворювач ДСП, якщо в ньому замість магнітоелектричного перетворювача застосувати феродинамічний. Як відомо, у феродинамічному перетворювачі тягове зусилля пропорційне добутку струмів у його котушках; якщо ж котушки з’єднані послідовно, то зусилля пропорційне квадрату струму.
 Вимірювання витрати газу в трубопроводі за допомогою нормальної діафрагми, мембранного диференціального манометра та вторинного перетворювача ДСП із феродинамічним протидійним елементом (1-важіль, 2-якір диференціально-трансформаторного перетворювача, 3-підсилювач,.4-пере-творювач змінного струму на постійний, 5-феродинамічний перетворювач). Робоче зусилля
Вимірювання витрати газу в трубопроводі за допомогою нормальної діафрагми, мембранного диференціального манометра та вторинного перетворювача ДСП із феродинамічним протидійним елементом (1-важіль, 2-якір диференціально-трансформаторного перетворювача, 3-підсилювач,.4-пере-творювач змінного струму на постійний, 5-феродинамічний перетворювач). Робоче зусилля  . Протидійне зусилля
. Протидійне зусилля  . За рівноваги
. За рівноваги  , тому струм на виході
, тому струм на виході  пропорційний значенню витрат
пропорційний значенню витрат  .
.
 Система дистанційного вимірювання витрати рідини в трубопроводі: 1-ротаметр; 2-диференціальний трансформаторний перетворювач соленоїдного типу; 3-трансформаторний перетворювач із поворотною вторинною котушкою; 4-підсилювач; 5-сервоелектродвигун; 6-покажчик. Підйом поплавка ротаметра залежить від витрати рідини. Якщо при
Система дистанційного вимірювання витрати рідини в трубопроводі: 1-ротаметр; 2-диференціальний трансформаторний перетворювач соленоїдного типу; 3-трансформаторний перетворювач із поворотною вторинною котушкою; 4-підсилювач; 5-сервоелектродвигун; 6-покажчик. Підйом поплавка ротаметра залежить від витрати рідини. Якщо при  якір соленоїдного трансформаторного перетворювача 2 розташований симетрично відносно вторинних обмоток, то різницева напруга на його виході
якір соленоїдного трансформаторного перетворювача 2 розташований симетрично відносно вторинних обмоток, то різницева напруга на його виході  . Вторинна напруга е2 трансформаторного перетворювача 3 за такого положення, як показано на рисунку, теж дорівнює нулю. Внаслідок піднімання поплавка виникає напруга
. Вторинна напруга е2 трансформаторного перетворювача 3 за такого положення, як показано на рисунку, теж дорівнює нулю. Внаслідок піднімання поплавка виникає напруга  на виході соленоїдного перетворювача 2 й вмикається серводвигун, який обертає рамку трансформаторного перетворювача - доти, доки е2 не зрівняється з . За кожного значення серводвигун цієї слідкуючої системи шукає відповідне положення рамки трансформаторного перетворювача 3 - таке, щоб напруга е2 дорівнювала напрузі .
на виході соленоїдного перетворювача 2 й вмикається серводвигун, який обертає рамку трансформаторного перетворювача - доти, доки е2 не зрівняється з . За кожного значення серводвигун цієї слідкуючої системи шукає відповідне положення рамки трансформаторного перетворювача 3 - таке, щоб напруга е2 дорівнювала напрузі .
ВИМІРЮВАННЯ ПАРАМЕТРІВ РУХУ ТВЕРДИХ ТІЛ
Під параметрами руху твердого тіла розуміють лінійні та кутові переміщення центру мас і всі їх похідні в часі - швидкість, прискорення, різкість тощо.
Загалом параметри руху - векторні величини, тому їх необхідно вимірювати, визначаючи модуль відповідного вектора та кута, що характеризує положення вектора у вибраній системі координат, або визначення складових вектора на осях вибраної системи відліку.
Між параметрами руху існує просторовий та часовий зв’язок. Під просторовим розуміють взаємний зв’язок лінійних та кутових параметрів руху, наприклад,  (тут
(тут  - кутове прискорення,
- кутове прискорення,  - лінійне прискорення на відстані
- лінійне прискорення на відстані  від центра обертання досліджуваного об’єкта). Це дає змогу визначити параметри лінійного руху через геометричні розміри () та параметри кутового руху, і навпаки.
від центра обертання досліджуваного об’єкта). Це дає змогу визначити параметри лінійного руху через геометричні розміри () та параметри кутового руху, і навпаки.
Часовий взаємозв’язок параметрів руху - це інтегрально-диференціальний зв’язок між ними, внаслідок якого одні параметри руху можуть бути визначені через інші їх інтегруванням чи диференціюванням, наприклад, знаючи швидкість, можна визначити прискорення:  .
.
Методи вимірювань параметрів руху можуть бути розділені на дві групи:
- абсолютні (інерціальні) методи, в основу яких покладений принцип інерції; параметри руху вимірюються в інерціальному просторі, тобто в просторі, в якому справедливі закони Ньютона;
- відносні методи, для яких параметри руху одної системи координат вимірюють відносно іншої системи координат.
Залежно від методу, покладеного в основу принципу дії вимірювального засобу, всі вимірювальні засоби можуть бути розділені на дві групи:
־ інерціальні, де відсутній безпосередній контакт між досліджуваним об’єктом та нерухомою системою відліку, а вхідною величиною первинних перетворювачів є сила інерції, що сприймається корпусом давача, з яким зв’язана власна (рухома) система відліку; інерціальні прилади для вимірювань параметрів лінійного руху прийнято називати сейсмічними, а кутового – гіроскопічними;
־ контактні, які основані на безпосередньому контакті між рухомим об’єктом і системою, прийнятою за нерухому; контакт не обов’язково повинен бути механічним, він може забезпечуватись оптичними, акустичними чи іншими способами.
Назви деяких засобів, призначених для вимірювань тих чи інших параметрів:
велосиметр - прилад для вимірювань швидкості при лінійному переміщенні досліджуваного об’єкта;
тахометр- прилад для вимірювань кутової швидкості обертання вала;
спідометр- прилад для вимірювань швидкості поступального руху та довжини пройденого шляху (переміщення);
акселерометр - прилад для вимірювань прискорення;
віброакселерометр- прилад для вимірювань параметрів вібрацій (амплітуди вібрацій та віброприскорень).
Читайте також:
- Автоматизація водорозподілу на відкритих зрошувальних системах. Методи керування водорозподілом. Вимірювання рівня води. Вимірювання витрати.
- Алфавітний підхід до вимірювання кількості інформації.
- В якості критеріїв для оцінки або вимірювання предмета завдання з надання впевненості не можуть використовуватись очікування, судження або власний досвід аудитора.
- Визначення параметрів і показників для вимірювання кожного процесу та націлення їх на величини
- Вимірювання
- Вимірювання PCO2.
- Вимірювання активної потужності у трифазних електричних колах
- Вимірювання величини виробничого потенціалу підприємства на базі поелементного підходу.
- Вимірювання витрат за перепадом тиску
- Вимірювання витрати за перепадом тиску
- Вимірювання витрати за рівнем
- Вимірювання вологості
| <== попередня сторінка | | | наступна сторінка ==> |
| Вимірювання товщини шару покриття | | | Вимірювання параметрів лінійного руху |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |