- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Методичні вказівки
В процесі виконання роботи студенти відпрацьовують прийоми аналізу стану датчиків на об’єкті керування, видачі керуючих сигналів на об’єкт, використання підпрограм, реалізація тимчасових затримок (програмування таймера). Такі навики необхідні для реалізації керуючих алгоритмів програмним способом з використанням мікропроцесора.
5.3.1 Перевірка теоретичних знань студентів проводиться викладачем протягом перших десяти хвилин занять. При цьому виявляється ступінь активності кожного студента, якість засвоєння теми. Форма питання повинна бути спрямована на формування у кожного студента особистої відповідальності за ефективність своєї праці.
5.3.2 Завдання на програмну реалізацію окремих елементів керуючого алгоритму видається кожній бригаді студентів. Завдання відрізняються одне від одного комбінаціями вхідних та вихідних сигналів розміром тимчасової затримки.
Таблиця 5.1 — Варіанти бригадних завдань
| Бригада | Аналіз датчиків | Вихідні сигнали | Ттимчасова затримка, с | |
| вимкнути | ввімкнути | |||
| №1 | X1, ХЗ | У1, У4 | У2, У5 | |
| № 2 | Х2, X1 | УЗ, У5 | У1, У4 | |
| № 3 | X1, Х2 | У2, У6 | УЗ, У5 | |
| № 4 | Х3, X1 | У4, У5 | У2, У6 | |
| № 5 | Х2, X3 | У5,У6 | У1, УЗ |
5.3.3 Задача видачі сигналів керування зводиться до вмикання розрядів вихідного порту мікро-ЕОМ у різних комбінаціях. При цьому комбінації повинні змінювати одна одну при переході до чергової операторної вершини граф-схеми алгоритму керування.
Реалізувати зміни вихідних сигналів мікро-ЕОМ можна двома способами: статичним та динамічним.
Статичнийспосіб припускає пряме включення необхідних розрядів вихідного порту без врахування їх попереднього стану. Пряме включення тих або інших світлодіодів на виході мікро ЛАБ KP580 ИК-80 відпрацьовувалось у лабораторній роботі № 4.
Наприклад: MVI А, <константа> – завантаження у акумулятор коду числа, яке відповідає комбінації нулів та одиниць у виходному байті.
OUT F9 видача коду в порт виведення.
Цей простий спосіб використовується при невеликому числі керуючих сигналів. Особливість способу полягає в тому, що керуючі сигнали розглядаються у статиці, та при переході від одної комбінації до другої всі сигнали, що не були вимкнуті, потребують повторного включення.
Але, в багатьох практичних випадках, коли число сигналів керування перевищує 10...15 цей спосіб є нелегким, а коли сигнали формуються програмами не підходить у принципі. Тоді використовується динамічний спосіб формування сигналів керування.
Динамічний спосіб розглядає зміну вихідних сигналів при переході між операторними вершинами граф-схеми алгоритму. Він реалізує лише необхідні зміни, зберігаючи значення решти розрядів вихідного порту.
Ця задача розв’язується в два прийоми. Спочатку занулюються розряди сигналів, які вимикаються при збереженні решти інформації.
Потім примусово заносяться одиниці в розряди сигналів, що вмикаються.
Це можна зробити таким чином.
Занулення конкретних розрядів:
MVІ В <маска о.р.> Завантаження в регістр В маски розрядів, що занулюються;
IN F9 Читання порту виведення;
CMA Інвертування вмісту регістра-акумулятора;
ОRA B Логічне додавання вмісту регістра А з маскою;
CMA Інвертування вмісту регістра-акумулятора;
OUT F9 Видача результатів в порт виведення.
При цьому розряди порту, які вказані в масці, вимикаються.
5.3.4 Задача читання датчиків зводиться до аналізу стану відповідних розрядів вхідного порту.
Виділення розряду, що аналізується проходить по розрядних логічних множеннях місткості порту введення та "маски" конкретного датчика, який підключений до даного розряду. При цьому використовується такий набір команд:
MVI D, <маска датчика> Занесення маски датчика в регістр;
IN FA Читання порту введення;
ANA D Логічне множення вмісту регістра А та маски;
J... Адреса Умовний перехід за адресою.
Маску можна включити безпосередньо в команду логічного множення. Тоді команда ANA D замінюється командою ANІ <маска> , а команда MVI D вилучається.
Спільний аналіз двох датчиків (при розгалуженні алгоритму на три напрямки) робиться аналогічно, але результат маскування порівнюється послідовно з константами, які відповідають шляхам переходу.
Наприклад:
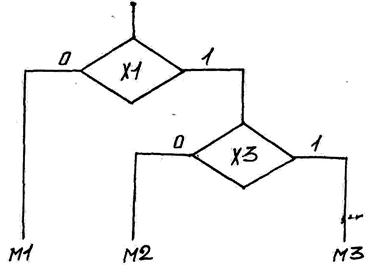 |
MVI D, OA Занесення в регістр маски Х1Х3;
 |
IN FA Читання порту введення;
ANA D Маскування;
CPI OA Порівняння з константою;
JZ M3 Перехід на мітку МЗ;
CPI 02 Порівняння з константою;
JZ M2 - Перехід на мітку М2;
JMP M1 Безумовний перехід на мітку.
Слід відмітити, що маскування спрощується, якщо маску розташовувати прямо в команді логічних множень ANІ <маска>. У цьому випадку не використовується регістр загального призначення та вилучається операція його завантаження.
5.3.5 Використання підпрограм значно спрощує програмування алгоритмів керування, оскільки програма керування зображує чергування однотипних процедур. Це процедури корекції розрядів байта що видаються (сигнали керування), це аналіз розрядів вхідного байта (читання датчиків), це організація тимчасових затримок (реалізація таймерів).
Усі ці процедури бажано реалізувати через підпрограми.
5.3.6 Програмування таймера організовується як тимчасова затримка, яка необхідна на виконання великої кількості простих та коротких машинних команд. Такою командою є зменшення на одиницю вмісту регістрової пари (ДСХ <код пари> ).
Приклад програми тимчасової затримки:
Мітка 1 LXI B, K Завантаження константи у регістрову паруВ (регістри В і С);
Мітка 2 DCХ В Зменшення на одиницю вмісту
реєстраційної пари В.
MOV А, В Пересилання вмісту регістра В у регістр А;
ORA C Логічне складання вмісту
регістра А та С;
Мітка 3 JNZ МІТКA 2 Внутрішня петля таймера;
DCR D Зменшення на 1 вмісту регістра-
(установлюється завчасно)
JNZ МІТКA 1 Основна петля затримки.
Комбінація команд MOV А, В і ORA C дозволяє перевірити на нуль шістнадцятирозрядну регістрову пару у восьмирозрядному регістрі-акумуляторі.
5.3.7 Вказівки до виконання бригадного завдання
Програма повинна починати свою роботу при вимкнених датчиках. При цьому вихідні сигнали, які подаються, ввімкнуті (реалізувати прямим включанням).
При вмиканні першого датчика комбінація вихідних сигналів повинна змінюватись динамічним способом.
При спрацьовуванні другого датчика повинні загоратися усі світлодіоди та погаснути після заданої тимчасової затримки.
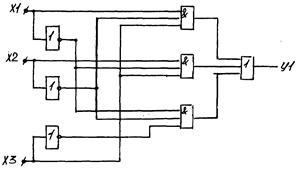 |
5.3.8 Програмна реалізація заданої комбінаційної схеми проводиться кожним студентом самостійно. Кожний студент одержує свій варіант завдання у вигляді схеми на логічних елементах. Для програмної реалізації схеми її необхідно виразити структурною формулою. Тоді формується вихідний сигнал У1 при появі на вхідному порту тих комбінацій включання датчиків, які відповідають складовим структурної формули
Приклад:
За схемою складена структурна формула:

Таблиця 5.2 — Програма, що реалізується
| Адреса | Код | Мітка | Мнемокод | Коментар |
| 3Е | MVI A, 81 | Програмування | ||
| 8І | ||||
| Д3 | OUT FB | Інтерфейса | ||
| FB | ||||
| DB | START: | IN FA | Читання вхідного порту | |
| FA | ||||
| E6 | ANI OE | Виділення сигналів Х1Х2Х3 | ||
| OE | ||||
| Продовження таблиці 5.2 | ||||
| FE | CPI OA | Перевірка доданка 
| ||
| OA | ||||
| 800А | CA | JZ ON | Перехід на ON, якщо перший доданок дорівнює 1 | |
| 800В | IC | |||
| 800С | ||||
| 800Д | FE | CPI OC | Перевірка доданка 
| |
| 800Е | OC | |||
| 800F | CA | JZ ON | Перехід на ON, якщо другий доданок дорівнює 1 | |
| IC | ||||
| FE | CPI 00 | Перевірка доданка 
| ||
| CA | JZ ON | Перехід на ON, якщо третій доданок дорівнює 1 | ||
| IC | ||||
| 3E | MVI A, 00 | Завантаження 0, якщо всі доданки дорівнюють 0 | ||
| C3 | JMP OUT | Перехід до виходу результату | ||
| 801A | IE | |||
| 801B | ||||
| 801C | 3E | ON: | MVI A, 02 | Завантаження у акумулятор VI |
| 801D | ||||
| Продовження таблиці 5.2 | ||||
| 801Е | Д3 | OUT: | OUT F9 | Видача VI у вихідний порт |
| 801F | F9 | |||
| C3 | JMP START | Повернення до початку програми | ||
Зміст звіту:
— титульний лист;
— мета роботи;
— варіант бригадного завдання;
— програма, що реалізує завдання;
— індивідуальне завдання на реалізацію комбінаційної схеми;
— програма, що реалізує роботу комбінаційної схеми.
Звіт оформляється на листах формату А4 згідно з вимогами ЄСКД до текстових документів.
Читайте також:
- I. ЗАГАЛЬНІ МЕТОДИЧНІ ВКАЗІВКИ
- Вказівки до виконання контрольної роботи
- Вказівки по заповненню наряду-допуску
- Вказівки по програмуванню
- Вказівки по програмуванню
- Вказівки по програмуванню.
- ВКАЗІВКИ ЩОДО ОРГАНІЗАЦІЇ ВИКОНАННЯ ІНДИВІДУАЛЬНОГО
- Головні етапи кількісного аналізу та оцінювання ризику. Методичні підходи до визначення ризику.
- Додаткові методичні прийоми вивчення вищої нервової діяльності.
- ЗАВДАННЯ ТА МЕТОДИЧНІ ВКАЗІВКИ ДО МОДУЛЬНОЇ КОНТРОЛЬНОЇ РОБОТИ № 1
- ЗАВДАННЯ ТА МЕТОДИЧНІ ВКАЗІВКИ ДО МОДУЛЬНОЇ КОНТРОЛЬНОЇ РОБОТИ № 2
- Завдання та методичні рекомендації до вивчення теми
| <== попередня сторінка | | | наступна сторінка ==> |
| Варіанти завдань | | | ЛАБОРАТОРНА РОБОТА №6 |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |