- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Приведення довільної системи сил до даного центру.
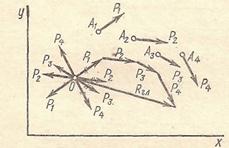
Дано систему сил (наприклад, чотири сили Р1, Р2, Р3, Р4), розташованих як завгодно на площині (рис. 1). Потрібно скласти ці сили.
|
Візьмемо довільну точку О і приведемо всі дані сили до цієї точки, скористуючись способом приведення сили до точки.
Рис. 1.
В результаті приведення отримаємо сили Р1, Р2, Р3 і Р4, що прикладені у точці О (позначені на рисунку двома рисками), і приєднані пари (Р1, Р1), (Р2, Р2) (Р3, Р3) і (Р4, Р4), моменти яких дорівнюють моментам даних сил відносно точки О. Тобто, позначаючи моменти пар відповідно М1, М2, М3 і М4, а моменти сил МО(Р1), МО(Р2), МО(Р3) і МО(Р4), отримаємо:
М1 = МО(Р1), М2 = МО(Р2), М3 = МО(Р3), М4 = МО(Р4) (1)
Складаючи сили Р1, Р2, Р3 і Р4, прикладені в центрі приведення 0 (відзначені на рисунку двома рисками): одержуємо результуючу силу Rгл, що дорівнює їх геометричній сумі й прикладену в тій же точці О:
Rгл= Р1 + Р2 + Р3 + Р4.
Складаючи пари (Р1, Р1), (Р2, Р2) (Р3, Р3) і (Р4, Р4) - одержимо результуючу пару, момент якої Мгл дорівнює алгебраїчній сумі моментів пар, що його складають. Отже:
Мгл=М1 + М2 + М3 +М4. (2)
Маючи на увазі рівності (1), вираження (2) можна надати так:
Мгл = М0(Р1) + М0(Р2) + М0(Р3) + М0(Р4), або 
Читайте також:
- I. Органи і системи, що забезпечують функцію виділення
- I. Особливості аферентних і еферентних шляхів вегетативного і соматичного відділів нервової системи
- II. Анатомічний склад лімфатичної системи
- IV. Розподіл нервової системи
- IV. Система зв’язків всередині центральної нервової системи
- IV. Філогенез кровоносної системи
- POS-системи
- T. Сутність, етіологія та патогенез порушень опорно-рухової системи
- VI. Філогенез нервової системи
- А) Заробітна плата її форми та системи.
- А) Заробітна плата, її форми та системи.
- А) Поліпшення системи зворотного зв'язку.
| <== попередня сторінка | | | наступна сторінка ==> |
| | | Головний вектор і головний момент. |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |