- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
СИСТЕМИ ДИСТАНЦІЙНОЇ ПЕРЕДАЧІ ПОКАЗІВ
У загальному випадку система дистанційного передавання показів представляє собою вимірювальну систему, яка включає розташовані на місці вимірювання первинний вимірювальний перетворювач, що вимірює фізичну величину і перетворює її в сигнал вимірювальної інформації у формі, зручній для передачі на відстань, та вторинного вимірювального перетворювача, який розташований на щиті і подає інформацію у формі, зручній для безпосереднього сприймання оператора [46].
Первинний вимірювальний перетворювач може передавати вимірювальну інформацію у вигляді аналогового сигналу, який безперервно змінюється з часом у відповідності зі зміною вимірюваної фізичної величини і який сприймає вторинний аналоговий перетворювач, або у вигляді дискретного сигналу, який сприймає вторинний цифровий перетворювач. Принципово будь-який первинний вимірювальний перетворювач тиску складається з чутливого елементу одного з раніше розглянутих типів (наприклад, сильфону), який вимірює тиск і перетворює його у переміщення вільного кінця чутливого елемента або у зусилля, яке розвивається на ньому, та пристрою, який перетворює переміщення або зусилля у пропорційний електричний (пневматичний) сигнал для подальшого передавання на відстань. Вторинний перетворювач системи дистанційного передавання сприймає електричний (пневматичний) сигнал і перетворює його у переміщення стрілки або пера самописця.
Зміна вихідного сигналу первинного вимірювального перетворювача, яка відповідає зміні вимірюваної величини від її мінімального значення до максимального, повинна бути узгоджена з граничною зміною вхідного сигналу вторинного перетворювача.
Раціональним шляхом вирішення задачі узгодження характеристик первинного і вторинного перетворювачів є створення первинних вимірювальних перетворювачів з уніфікованим значенням вихідного сигналу. Це означає, що, незалежно від границь вимірювання перетворювача, його вихідний сигнал за допомогою спеціальних регулювань має завжди одні і ті самі мінімальні та максимальні значення, які відповідають нижній та верхній границям вимірювання фізичної величини.
При такому підході одні і ті самі вторинні перетворювачі систем дистанційного передавання, сприймаючи уніфікований сигнал, можуть служити для вимірювання різних фізичних величин.
У залежності від виду інформаційного параметра аналогові уніфіковані сигнали можуть бути сигналами постійного струму, сигналами взаємоіндуктивності або відповідної напруги змінного струму, сигналами частоти змінного струму та сигналами тиску стиснутого повітря. Нижче наведені найбільш розповсюджені у вимірювальних системах границі зміни цих сигналів.
Границі зміни струмового сигналу постійного струму 0…5 мА; 0…10 мА та 4…20 мА.
Границі зміни сигналу напруги змінного струму 0…1 В (або –1…0…+1 В) за умов відповідної зміни сигналу комплексної взаємної індуктивності 0…10 мГн (або –10…0…+10 мГн).
Границі зміни сигналу частоти напруги змінного струму 4…8 кГц.
Границі зміни сигналу тиску стиснутого повітря 0,02…0,1 МПа.
Незалежно від виду вимірюваного уніфікованого сигналу усі вторинні електричні перетворювачі побудовані за схемою аналогових перетворювачів слідкуючого зрівноваження з астатичною характеристикою (рис. 2.27).
Значення уніфікованого сигналу Х, яке надходить від вимірювального перетворювача і пропорційне вимірюваній фізичній величині, порівнюється у вимірювальній схемі порівняння ВСП із значенням сигналу Хзз, яке виробляє пристрій зворотного зв’язку ПЗЗ.
Якщо сигнал Х не дорівнює Хзз, то різниця цих сигналів DХ=Х-Хзз підсилюється спочатку за напругою у підсилювачі некомпенсації ПН, а потім за потужністю у підсилювачі потужності ПП до значення, при якому починається обертання валу реверсивного двигуна РД. Повертання валу реверсивного двигуна призводить до переміщення кінематично пов’язаного з ним вказівника відлікового пристрою ВП та за необхідністю – пера самопишучого пристрою. Одночасно кут повертання валу реверсивного двигуна j перетворюється у пристрої зворотного зв’язку (ППЗ) у величину Хзз, однорідну з вимірюваною величиною.
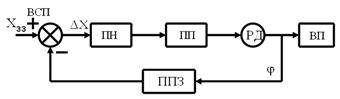
Рисунок 2.27 – Схема побудови аналогових перетворювачів
Обертання вала реверсивного двигуна триває до того часу, доки сигнал некомпенсації DХ не стає меншим за поріг чутливості підсилювача некомпенсації (НП). При цих умов настає рівновага вимірювальної схеми, сигнали на виході підсилювачів напруги та потужності дорівнюють нулю, реверсивний двигун зупиняється. Таким чином, кожному значенню вимірюваної величини Х відповідає визначений кут повороту вала реверсивного двигуна і, відповідно, визначене положення вказівника відносно шкали ЗВТ. Отже, шкала вторинного перетворювача може бути відградуйована в одиницях фізичної величини, яку вимірюють первинним вимірювальним перетворювачем [46].
Пневматичні вторинні перетворювачі сприймають від вимірювальних перетворювачів сигнал у вигляді тиску стиснутого повітря (0,02…0,1) МПа. Для підсилення вимірюваного сигналу і переміщення вказівника у пневматичних вторинних перетворювачах також використана енергія стиснутого повітря. Тиск повітря для живлення перетворювачів становить 0,14 МПа.
Принципова схема вторинного показуючого перетворювача наведена на рис. 2.28. Сигнал від вимірювального перетворювача у вигляді тиску стиснутого повітря рвх підведений до чутливого елементу – сильфону 1. Із збільшенням рвх розвивається обертовий момент, який створює зусилля дінця сильфону на важелі порівняння 2. За цих умов зменшується зазор між заслінкою, яка закріплена на важелі 2, та нерухомим соплом 3. Тиск повітря, яке витікає з сопла, зростає і, відповідно, за допомогою пневматичного підсилювача потужності 11 підвищується тиск у кожусі 8 мембранного виконуючого механізму. Під дією підвищуваного тиску створюється переміщення мембрани 7 і спертого на неї важеля 5, який закріплений плоскою пружиною 6 до корпусу виконуючого механізму.
Переміщення вільного кінця важеля 5 за допомогою тросика 9 передається вказівникові 10 та приводить до розтягу пружини зворотного зв’язку 4, закріпленої на важелі 2. Переміщення вільного кінця важеля 5 і вказівника 10 триває до того часу, доки момент сили розтягу пружини зворотного зв’язку не зрівноважить момент сили, який розвиває чутливий елемент.
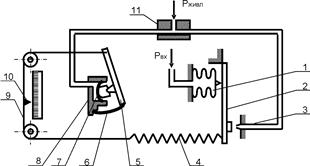
Рисунок 2.28 – Принципова схема показуючого перетворювача
Таким чином, кожному значенню вимірюваного тиску рвх відповідає визначене положення вільного кінця важеля 5 і вказівника 10 відносно шкали перетворювача.
Настроювання нуля перетворювача виконують зміщенням вказівника 10 відносно тросика 9. Узгодження верхньої межі вимірювання здійснюють зміною ефективної довжини пружини зворотного зв’язку 4. У самопишучих перетворювачах переміщення важеля зворотного зв’язку пов’язане з переміщенням вказівника і пера відносно стрічкової діаграми, яку приводить в рух електродвигун або пневматичний привід.
Якщо є необхідність одночасного контролю кількох вхідних величин, в корпусі одного вторинного перетворювача розташовують декілька однотипових вимірювальних механізмів, аналогічних розглянутому.
Пневматичні вторинні перетворювачі, незважаючи на широку номенклатуру засобів вимірювання, що випускають, мають принципово однакову схему і відрізняються тільки числом контрольованих величин, методом положення вказівника та конструкцією ряду елементів кінематичної схеми.
Більшість вторинних пневматичних перетворювачів мають клас точності 1.
Диференційно-трансформаторні перетворювачі використовують для перетворення поступального переміщення чутливого елемента в пропорційну зміну модуля комплексної взаємної індуктивності.
На рис.2.29 зображені електричні схеми взаємозамінюваного диференційно-трансформаторного перетворювача типу ДТП (а) і ПД (б) [46].
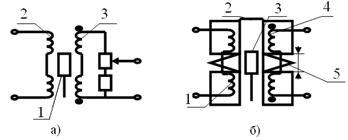
Рисунок 2.29 – Електричні схеми взаємозамінюваного диференційно-трансформаторного перетворювача типу ДТП (а) і ПД (б)
Перетворювач типу ДТП має первинну обмотку 1, яка складається з двох секцій, з’єднаних послідовно, і живиться напругою змінного струму. Вторинна обмотка 2 також складається з двох секцій, які намотані зустрічно. До вторинної обмотки підключений дільник, який складається з постійного R2 та змінного R1 резисторів. Первинна та вторинна обмотки намотані на каркас котушки, всередині якої знаходиться рухоме осердя 3, виготовлене із сталі, і пов’язане з чутливим елементом вимірювального перетворювача тиску. Коли є необхідність, осердя розташовують у розділяючій немагнітній трубці, яка знаходиться під вимірюваним тиском.
Створюваний первинною обмоткою перетворювача магнітний потік індукує у секціях вторинної обмотки е.р.с. е1 та е2, значення яких залежать від струму живлення первинної обмотки І, частоти напруги живлення та взаємних індуктивностей М1 та М2 між секціями вторинної обмотки та первинною обмоткою.
Взаємні індуктивності М1 та М2 двох секцій вторинної обмотки дорівнюють одна одній при середньому положенні осердя всередині котушки перетворювача. Завдяки тому, що секції вторинної обмотки включені зустрічно, різниця взаємних індукцій DМ = М1 – М2 дорівнює нулю і результуюча е.р.с. на виході вторинної обмотки також дорівнює нулю.
Під час зміни вимірюваного манометром тиску і відповідному відхиленні пов’язаного з чутливим елементом осердя від середнього положення значення взаємної індуктивності одної з секцій вторинної обмотки збільшується, а іншої – зменшується. На виході вторинної обмотки різниця взаємних індуктивностей її секцій визначають за формулою:
 , (2.69)
, (2.69)
де Мн – номінальне значення взаємної індукції (Мн = 0,01 Гн), яке відповідає номінальному переміщенню осердя lн;
l – відхилення осердя від середнього положення;
e – номінальне значення кута втрат (e = 0,1222 рад).
За цих умов на виході вторинної обмотки з’являється е.р.с. Δl=l1 – l2, пропорційна різниці взаємних індуктивностей ΔМ.
Взаємозамінювані диференційно-трансформаторні перетворювачі мають модифікації ДТП-1, ДТП-2 і ДТП-3 з номінальним переміщенням осердя з середнього положення 1,6; 2,5 та 4мм відповідно. При цьому взаємна індуктивність змінюється від 0 до 10 мГн.
Статична характеристика диференційно-трансформаторних перетворювачів практично лінійна. Нелінійність характеристики не повинна перевищувати 0,5% номінального значення взаємної індуктивності. Під час градуювання перетворювача верхню границю напруги вторинної обмотки і, отже, взаємної індуктивності перетворювача можна змінювати на ±25% за допомогою регулювального резистора R1.
диференційно-трансформаторний перетворювач типу ПД (рис. 2.29 б) аналогічний за принципом дії до перетворювача типу ДТП, але має декілька конструктивних відмінностей. Котушка перетворювача складається з двох відокремлених частин, які закріплені на немагнітній трубці 2 з деяким зазором δ. У зазорі між котушками знаходиться пластинчаста пружина 5, яка забезпечує їх фіксоване положення [46].
Первинна обмотка 1 складається з двох секцій, які включені послідовно і розташовані на різних котушках. Дві секції вторинної обмотки 4 включені зустрічно і також розміщені на різних котушках. Осердя 3 з’єднане з чутливим елементом вимірювального перетворювача тиску.
Основна різниця між перетворювачами типу ПД і ДТП полягає у відсутності на вході вторинної обмотки до дільника з регульованим опором. Під час градуювання перетворювача типу ПД верхню границю напруги вторинної обмотки, а отже, взаємної індуктивності, можна змінювати шляхом зміни регульованого зазору δ між котушками.
Перетворювачі типу ПД мають модифікації ПД3, ПД4 та ПД5 з номінальним переміщенням осердя з середнього положення ± 1,5; ± 2 та ± 1,5 мм відповідно. Границі зміни модуля взаємної індуктивності між первинною та вторинною обмотками перетворювачів типу ПД при номінальному переміщенні осердя дорівнюють (–10…0…+10) мГн, що відповідає границі зміни напруги на виході вторинної обмотки (–1…0…+1)В.
Яскравим представником деформаційних манометрів з вихідним дифтрансформаторним перетворювачем є безшкальний манометр з одновитковим чутливим елементом типу МЕД (рис. 2.30).

Рисунок 2.30 – Безшкальний манометр типу МЕД
Манометр типу МЕД складається з одновиткового чутливого елемента 1, закріпленого у тримачі 4 із з’єднувальним штуцером 5. На тримачі жорстко закріплена котушка 9 дифтрансформаторного перетворювача, всередині якої вільно переміщується осердя 8, шток 10 якого за допомогою важеля 11 прикріплений до вільного кінця трубчастого чутливого елемента. У верхній частині тримача розміщені постійний 7 та регулювальний 3 резистори, які шунтують вторинну обмотку котушки перетворювача. З’єднувальні проводи виведені із задньої стінки корпуса ЗВТ крізь роз’ємне контактне з’єднання 2.
Манометри типу МЕД класу точності 1 і 1,5 виготовляють у вигляді манометрів надлишкового тиску (нижня границя вимірювання – 0, верхня границя – від 0,1 МПа до 160 МПа), мановакуумметрів (нижня границя – 0,1 МПа, верхня границя – від +0,06 до +2,4 МПа) та вакуумметрів (нижня границя – 0,1 МПа, верхня границя – 0).
Принцип роботи манометра типу МЕД у комплекті з вторинним перетворювачем розглянутий на прикладі вторинного перетворювача дифтрансформаторної системи типу КСД2 (рис. 2.31).
Дифтрансформаторний перетворювач І манометра з’єднаний з вторинним перетворювачем чотирма проводами, два з яких служать для живлення первинної обмотки А1, а інші для підведення е.р.с., яка розвивається у вторинній обмотці, до вимірювальної схеми порівняння
У вторинному перетворювачі розташований диф-трансформаторний блок ІІ, осердя якого кінематично пов’язане за допомогою кулачка К з валом реверсивного двигуна РД. Дифтрансформаторний перетворювач ІІ разом з кінематичною схемою створюють пристрій зворотного зв’язку вимірювальної схеми порівняння.
Будова та статичні характеристики дифтрансформаторних перетворювачів І та ІІ однакові, однак у середній частині дифтрансформатора ІІ розташована додаткова вторинна обмотка ІІІ, зашунтована регульованим резистором, яку використовують для корегування електричного нуля вторинного перетворювача.
Первинні обмотки АІ і АІІ котушок перетворювача з’єднані послідовно і живляться напругою 24 В змінного струму частотою 50 Гц від клема та від силового трансформатора електронного підсилювача ЕП. Вторинні обмотки перетворювачів І та ІІ, які складаються з двох зустрічно ввімкнених секцій (ВІ, СІ та ВІІ, СІІ), разом з додатковою вторинною обмоткою ІІІ (ВІІІ, СІІІ) також з’єднані послідовно і підключені до вхідних клем с та d електронного підсилювача, створюючи вимірювальну схему порівняння.
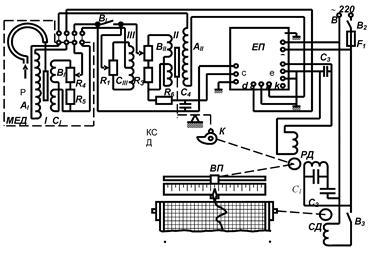
Рисунок 2.31 – Вторинний перетворювач дифтрансформаторної системи типу КСД2
При однакових положеннях осердь взаємні індуктивності, а отже, індуковані у вторинних обмотках обох котушок е.р.с. дорівнюють одна одній і взаємно компенсуються. Алгебраїчна сума цих сигналів на вході електронного підсилювача дорівнює нулю, і вимірювальна система знаходиться у стані рівноваги.
Зміна вимірюваного за допомогою манометра тиску і відповідне переміщення осердя в котушці 1 призводить до появи різниці е.р.с. на вході електронного підсилювача, причому значення різниці цих е.р.с. (напруга незбалансованості) пропорційна відхиленню осердя, а фазу визначають за напрямком переміщення осердя від стану, що встановився.
В електронному підсилювачі (ЕП) напруга підсилюється за значенням та потужністю, що приводить до обертання валу асинхронного реверсивного двигуна, керуюча обмотка якого приєднана до вихідних затискачів “е” та “к” підсилювача, а обмотка збудження за допомогою фазозсувних конденсаторів живиться від мережі змінного струму.
Обертання вала асинхронного реверсивного двигуна призводить до повертання кулачка К, який перетворює обертальний рух у поступове переміщення осердя диф-трансформаторного передачі вторинного перетворювача. Одночасно обертання вала двигуна призводить до переміщення рухомої каретки (вказівника і пера) відлікового пристрою відносно шкали та рухомої діаграми ЗВТ.
Обертання вала асинхронного реверсивного двигуна здійснюється до моменту зникнення напруги незбалансованості на вході електронного підсилювача, тобто до настання відповідності положень осердь обох дифтрансформаторних перетворювачів.
Таким чином, кожному значенню вимірюваного манометром тиску відповідає однозначне положення вказівника вторинного перетворювача.
Корегування нуля вторинного перетворювача виконують зміною положення повзунка резистора R1, який змінює сигнал незбалансованості на вході підсилювача. Слід підкреслити, що переміщення осердя у котушці ІІ не впливає на е.р.с., яка створюється вторинною обмоткою ІІІ тому, що остання розташована у середній частині котушки ІІ і всередині її завжди знаходиться тіло осердя.
Для перевірки правильності роботи вторинного перетворювача служить кнопка В1 (“контроль”), натискання якої перемикає вторинні обмотки І та ІІІ. За цих умов на вхід підсилювача подається напруга від вторинної обмотки котушки ІІ, що призводить до обертання вала реверсивного двигуна до встановлення осердя цієї котушки у середнє положення, а стрілки ЗВТ – навпроти контрольної позначки шкали.
Привід діаграмної стрічки здійснюється за допомогою синхронного двигуна СД. Швидкість руху діаграмної стрічки можна змінювати шляхом зміни передавального відношення редуктора електродвигуна.
Манометр типу МЭД може працювати у комплекті з будь-яким іншим вторинним перетворювачем дифтрансформаторної системи.
Широке розповсюдження отримали також диференційні мембранні манометри з дифтрансформаторним вихідним перетворювачем типу ДМ.
Чутливим елементом манометра є мембранний блок, який складається з двох сполучених мембранних коробок, що закріплені у сталевій розділювальній діафрагмі, яка відділяє “плюсову” камеру від “мінусової” камери, до яких підведена за допомогою імпульсних трубок вимірювана різниця тисків. Внутрішні порожнини мембранних коробок заповнені дистильованою водою. У середній частині “мінусової” мембранної коробки закріплений шток осердя диференційно-трансформаторного перетворювача.
Під дією вимірюваної різниці тисків “плюсова” мембранна коробка стискається, витискаючи дистильовану воду, що знаходиться у ній, до “мінусової” коробки, яка, розширюючись, переміщує осердя дифтрансформаторного перетворювача. Зусилля, яке розвиває тиск на площу мембран, зрівноважується силою їх пружної деформації. Для кожної границі вимірюваного перепаду тисків виготовляють мембранні коробки відповідної жорсткості.
Дифманометри типу ДМ виготовляють з верхньою границею вимірювання перепаду тисків від 1,6 кПа до 0,63 МПа. Клас точності дифманометрів 1 та 1,5. Моделі дифманометрів 3582, 3573, 3574 та 3583 споряджені дифтрансформаторним перетворювачем з уніфікованим сигналом 0…10 мГн, і їх комплектують будь-яким з перетворювачів дифтрансформаторної системи; модель 3583Ф споряджена перетворювачем феродинамічної системи (ВФС або ВФП).
Феродинамічний перетворювач використовують у манометрі з одновитковим чутливим елементом типу ИДФ, який випускають на Харківському заводі КВП. Принципово конструкція деформаційного манометра типу ІДФ аналогічна до розглянутої конструкції манометра типу МЕД. Різниця тільки в тому, що у манометрі типу ІДФ переміщення вільного кінця трубчастого елемента за допомогою секторного передавального механізму перетворюється у кутове переміщення рамки вихідного феродинамічного перетворювача ПФ. Манометри типу ІФД мають клас точності 1,5, їх випускають з верхньою границею вимірювання від 0,16 МПа до 40 МПа і комплектують вторинними перетворювачами феродинамічної системи [46].
Чутливим елементом дифманометра є в’яла мембрана з жорстким центром, а зусилля, яке розвивається під дією вимірюваної різниці тисків, зрівноважується силою деформації циліндричної пружини. Жорсткий центр мембрани сполучений за допомогою штока з осердям диференціально-трансформаторного перетворювача ПД. Під час зміни вимірюваного перепаду тисків від нуля до верхньої границі вимірювання модуль взаємної індуктивності перетворювача змінюється від –10 мГн до +10 мГн. Дифманометр типу ДМІ працює в комплекті з вторинним феродинамічним перетворювачем типу ВФС або ВФП.
Дифманометри типу ДМІ мають клас точності 1, їх випускають з верхньою границею вимірювання 0,63 кПа до 100 кПа.
| <== попередня сторінка | | | наступна сторінка ==> |
| ПРУЖИННІ ПРИЛАДИ ДЛЯ ВИМІРЮВАННЯ ТИСКУ | | | ЕлектРИЧНІ ЗАСОБИ ВИМІРЮВАННЯ ТИСКУ |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |