- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Регулювальники з позиційним (релейним) законом регулювання.
Структурна схема позиційної системи авторегулювання (САР) наведена на рис. 1.
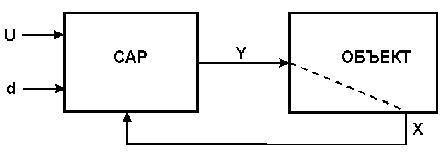
Рисунок 2.1 – Структурна схема САР:
U, d - вектора завдань і зон нечутливості;
X, Y - вектор регульованої величини і вихідний сигнал регулювання
Особливість таких регуляторів полягає в тому, що керуючий вплив (вихідний сигнал) приймає тільки кілька дискретних значень – позицій, тому їх називають позиційними. Даний тип регулятора ще називають Т-регулятором. Вони бувають з двопозиційним і трипозиційним законом регулювання.
Двопозиційні мають дискретну вихідну величину Y типа вкл./викл. (наприклад, включення/виключення нагрівача). Т-регулятора включає або вимикає вихідне реле залежно від того, досягла або не досягла регульована величина заданого значення.
Трипозиційні регулювальники мають дискретну вихідну величину Y з двома точками перемикання типа вкл./викл. і зоною нечутливості (наприклад, реверсивне управління сервоприводом) див. рис. 7,а.
Динамічні властивості об'єктів і вибір типа регулятора. Для визначення можливості використання Т-регулятора необхідно знати інерційність і час транспортного запізнювання регульованого об'єкту.
Для їх визначення на практиці найчастіше використовують методику зняття перехідної характерістіки, (див. лаб. работа №1).
Потрібний, щоб система знаходилася у спокої і були відсутні зовнішні обурення. На вхід виконавського органу подається ступінчаста дія 1(t) (рисунок 1.2)., внаслідок чого станом об'єкту є деякий процес X(t) – перехідну характеристику (див. на рисунку 2.2,а.).

Рисунок 2.2 – Обробка перехідної функції теплового об'єкта:
а) реальна крива; б) ідеалізована крива,
На рисунку 2.2 наведені позначення: τ – час транспортного запізнювання;
T – постійна часу (час узгодження) визначається інерційністю об'єкту; Xyст – стале значення; R – нахил розгінної кривої dx/dt (макс. швидкість зміни Х)
По вигляду цього перехідного процесу об'єкти регулювання можна підрозділити на декілька основних категорій:
- об'єкти з малою інерційністю і без запізнювання (T < 5 мін),
- об'єкти з інерційністю і з малим запізнюванням (τ/T < 0,1).
Виходячи із співвідношення τ/T і вибирається тип регулятору. Слід пам’ятати, що Т-регулятори можна застосовувати тільки якщо τ/T < 0,1. Позиційні регулятори не вимагають налаштування і забезпечують при цьому співвідношенні малий відхід від заданої температури.
Наприклад, вони використовуються для регулювання температури води в баках, в пастеризаторах, для управління нагрівом печі Ш2ХПА-25 хлібозаводу, в сушильних камерах ЖБК, в саунах і ін.
Алгоритм регулювання для позиційних регуляторів визначається статичною характеристикою регулювальника: залежністю вихідного сигналу Y від вхідного Х (див. рисунок 2.3).
Рисунок 2.3 – Статична характеристика двопозиційного регулятора
Вихідна величина Y дорівнює максимальній дії (нагрівач включений) при
X – Xзад < – δ, Y = 0 при X – Xзад > δ, де δ – поріг. Таку характеристику ще називають гістерезисною, а поріг спрацювання регулятора гістерезисом.
Процесом регулювання є коливання навколо заданого рівня (див. рисунок 2.5). Частота і амплітуда коливань визначаються величинами τ, R, T, δ. Однак якщо параметри коливань задовольняють технологічним і експлуатаційним обмеженням, то система вважається працездатною.
Для об'єктів з великою інерційністю T і з малим запізнюванням τ регулювання відбувається з постійними коливаннями до 5-15% від Uзад. Чим більше δ, τ/T, R, тим більше амплітуда коливань. Чим більше τ і T, тим більше період коливань.
Розглянемо як приклад структурну схему досліджуваної в даній лабораторній роботі схему САР температури з двохпозиційним регулятором (рисунок 2.4).
Рисунок 2.4 – Структурна схема САР температури з позиційним регулятором
Зображення об'єкта регулювання тут відповідає моделі, отриманої в роботі №1. Регулятор представлений статичною характеристикою двохпозиційного регулятора.
У вихідному стані температура об'єкта регулювання значно нижче заданої, сигнал неузгодженості має велике позитивне значення, тому на виході регулятора сигнал максимальний U і UMAX і температура починає швидко збільшуватися (рисунок 2.5).

Рисунок 2.5 – Характер зміни температури і напруги живлення печі
при роботі позиційного регулятора
Коли температура перевищить задане значення на величину δ, регулятор спрацьовує і на виході його встановиться мінімальне значення керуючого впливу U = UMIN. Однак, через запізнювання температура буде як і раніше збільшуватися і тільки через час τ почне зменшуватися.
Коли вона зменшиться нижче заданого на величину δ, регулятор знову спрацьовує і на виході установиться максимальне значення керуючого впливу U = UMАХ. Але зниження температури буде ще продовжуватися в інтервалі часу τ, після чого вона знову почне підвищуватися.
Таким чином, при використанні позиційного регулятора для керування об'єктом із запізнюванням виникають відхилення регульованого параметра від заданого значення Δθ+ і Δθ– (див. рисунок 2.5). Для того, щоб оцінити величину цих відхилень будемо вважати, що після спрацьовування регулятора в моменти часу t1, t2, ... протягом часу запізнювання τ, регульований параметр буде змінюватися з постійною швидкістю. Тоді величину відхилення можна визначити помноживши цю швидкість на час запізнювання. А формулу для обчислення швидкості зміни параметра можна одержати з диференціального рівняння інерційної ланки. У результаті одержимо такі залежності для розрахунку величини відхилень:
 ,
,
 (3.1)
(3.1)
де τ – час запізнювання об'єкта;
Т – постійна часу об'єкта;
θЗД – задане значення температури;
θMAX, θMIN – сталі значення температури, що відповідають UMAX, UMIN (визначаються по статичній характеристиці об'єкта).
| <== попередня сторінка | | | наступна сторінка ==> |
| Висновки по роботі | | | Опис експериментальної установки |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |