- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Графічна частина
1. Функціональна схема автоматизації
2.Структурна схема регулювання (параметру), графіки перехідного процесу, передаточна функція.
3.Зовнішній вид щита
4.Схема з’єднань зовнішніх проводок
Техніко-економічні показники
Вступ
У вступі необхідно подати загальну характеристику технологічного процесу, який підлягає автоматизації, його призначення та значення, рівень та перспективи розвитку, виходячи з перспектив розвитку даної галузі промисловості. Визначити досягнутий рівень автоматизації технологічних процесів галузі та обґрунтувати напрямки вдосконалення систем автоматизації з врахуванням сучасних можливостей комп’ютерної техніки.
1 ТЕХНОЛОГІЧНА ЧАСТИНА
1.1 Характеристика технологічного процесу
Необхідно описати суть проходження технологічного процесу на вибраному обладнанні, умови та властивості при яких він відбувається. Фактори, які можуть впливати на зміну протікання процесу. Вказати обладнання та його загальні характеристики.
1.2 Функціональні вузли технологічного об’єкта
Необхідно розглянути технологічну схему та описати устаткування і обладнання, на якому реалізують технологічний процес, основні стадії технологічного процесу і послідовність їх виконання. Приводять основні технічні показники та режими роботи технологічного обладнання. Навести теоретичні основи реалізації технологічних процесів та закономірності, на яких базується цей технологічний процес, з виявленням факторів, які визначають продуктивність, інтенсивність, якість, безпеку реалізації та інші особливості даного процесу.
Провести аналіз матеріальних і теплових балансів з метою визначення координат керування.
Визначити і проаналізувати фактори, що впливають на технологічний процес з метою вибору раціональної структури керування процесом.
1.3 Параметри технологічного процесу
На основі вивчення фізико - хімічних явищ, які відбуваються в технологічних апаратах і машинах, визначити величини, що найбільш суттєво впливають на хід технологічного процесу
Обґрунтувати номінальні значення параметрів технологічного процесу та допустимі межі їх зміни визначити з технологічних регламентів, довідників або технічної літератури.
Визначити основні параметри технологічного процесу. Аналізується вплив значень технологічних параметрів на основні показників роботи технологічної апаратури. Обґрунтовуються номінальні значення параметрів та межі їх відхилення. Цей аналіз проводять на основі технологічного регламенту, наукових досліджень технологічного процесу, правил експлуатації технологічної апаратури та вимог правил охорони довкілля.
Обґрунтування номінальних значень параметрів технологічного процесу та допустимі межі їх зміни визначають з технологічних регламентів, довідників або технічної літератури. Назви технологічних параметрів, їх номінальні значення та можливі межі відхилень від цих значень заносять в технологічну карту, яку складають у вигляді таблиці.
Таблиця 1.1- Технологічна карта процесу
| Назва параметру | Одиниця вимірювання | Номінальне значення | Допустимі відхилення |
| 1 Тиск 2 Температура 3 Рівень | Па 0С мм | 390 - 400 300 - 305 90 - 95 | +-1 +-3 +-2 |
2 РОЗРАХУНКОВО-ТЕХНОЛОГІЧНА ЧАСТИНА
2.1 Розробка функціональної схеми автоматизації технологічного об’єкту
На схемі автоматизації зображають:
1) технологічне і інженерне обладнання і комунікації (трубопроводи,
газоходи, повітропроводи) об'єкта, що автоматизується (далі - технологічне обладнання);
2) технічні засоби автоматизації або контури контролю, регулювання і управління (сукупність окремих функціонально зв'язаних приладів, що виконують певне завдання по контролю, регулюванню, сигналізації, управлінню і т.п.) ;
3) лінії зв'язку між окремими технічними засобами автоматизації або контурами (при необхідності).
Структурні схеми системи автоматизації виконуються по вузлах і включають всі елементи системи від датчика до регулюючого органа з вказуванням місця розташування та їх взаємозв'язку між собою.
При розробці схем вирішують наступні задачі:
· одержання інформації про стан технологічного устаткування;
· безпосередній вплив на технологічний процес для керування ним;
· стабілізація технологічних параметрів;
· контроль і реєстрація технологічних параметрів процесу і стану устаткування.
Ці функціональні задачі вирішуються на базі технічних засобів автоматизації (ТЗА).
Результатом розробки схем автоматизації є: · вибір методів виміру технологічних параметрів;
· вибір основних технічних засобів автоматизації;
· визначення приводів виконавчих механізмів регулюючих і запірних органів, керованих автоматично чи дистанційно;
· розміщення ТЗА на щитах і пультах, технологічному устаткуванні і трубопроводах.
Умови розробки функціональних схем (схем автоматизації).
1) Повинна зберігатися можливість нарощування функцій керування (принцип відкритості системи).
2) Система повинна будуватися на базі ТЗА державної системи промислових приладів і засобів автоматизації (ДСП).
3) Система повинна будуватися на базі уніфікованих комплексів, що дає значні переваги при монтажі, налагодженні, експлуатації і ремонті.
4) ТЗА вибирають, виходячи з наступних умов:
· виробництва (пожежо- і вибухонебезпечність, запиленість, агресивність і токсичність середовища);
· параметрів вимірюваного середовища;
· відстаней, що допускаються від давачів і виконавчих механізмів до регулюючих пристроїв;
· вимог до точності і швидкодії роботи системи.
Зображення засобів вимірювання й автоматизації на функціональних схемах формується відповідно до ДСТУ Б А.2.4-3:2009 умовними літерними позначеннями:
Основні буквені позначення вимірювальних величин і функціональних ознак приладів наведено ДСТУ Б А.2.4-16:2008 СПДС.
Опис функціональної схеми автоматизації має бути повний. Спочатку описують контури вимірювання, сигналізації, а потім контури автоматичного регулювання, дистанційного керування, захисту та блокування. Опис кожного контура здійснюється за функціональними зв’язками із зазначенням позицій кожного засобу, який входить у контур. В описі розкривають функціональне призначення кожного засобу. Послідовність опису визначається черговістю проходження сигналу в контурі. Опис аналогічних контурів не роблять, а роблять посилання, що цей контур діє аналогічно як описаний ( наприклад, контур 2 діє аналогічно як контур 3).
2.2 Розробка структурної схеми контуру керування.
Виходячи з функціональної схеми автоматизації потрібно розробити структурну схеми автоматичного регулювання параметру, який обумовлюється завданням дипломного проекту і призначається керівником проекту. Схему потрібно описати з обранням елементів системи управління параметром.
На основі аналізу технологічного апарата (процесу), як об’єкта керування, визначають координати керування об’єктом. Їх поділяють на вхідні збурюючі, вхідні керуючі, збурюючі і вихідні параметри. В більшості випадків вихідні параметри ТОК (технологічного об’єкту керування) стабілізують або змінюють за певним законом в часі. Вихідні параметри, в свою чергу, поділяють на три групи: параметри, за зміною яких організовують роботу ТОК (часто називають векторами регулюючих величин), параметри, які впливають на вихідні величини (параметри), але керування ТОК за цими параметрами складне або неможливе (ці параметри називають незалежними, збурюючими величинами, діями), параметри (фактори), що зв’язані зі специфікою роботи апарата. З урахуванням аналізу ТОК і поділу параметрів на вихідні, регулюючі і збурюючі фактори складають структурну схему взаємозв’язку між технологічними параметрами і факторами. На структурній схемі показують технологічний об’єкт у вигляді прямокутника, вхідні і вихідні величини, лінії взаємозв’язку між окремими параметрами і факторами. Канали регулюючих дій доцільно показувати на схемі суцільними лініями, а канали дій збурень - пунктирними з вказанням стрілками їх напряму.
2.3 Характеристика вимірювальних приладів і пристроїв, що використовуються в технологічному процесі
В цьому розділі описуються фізико-хімічні принципи, на яких побудований принцип роботи первинного перетворювача, що вимірює технологічний параметр, для якого розроблялась структурна схема автоматизації та система автоматичної сигналізації. Надати параметри та характеристики вимірювальних засобів.
2.4 Вибір виконавчого механізму регулювання …..
Вказуються виконавчі механізми, обрані для технологічного процесу, їх характеристики, умови експлуатації, стисло принцип роботи.
Наводяться властивості та характеристики регулюючих органів. Принципи їх роботи та закони регулювання які використовуються в технологічному процесі.
Додаток А
Вибір виконавчого механізму регулювання …..
При автоматизації виробництв в якості виконавчих зазвичай застосовують пристрої, що складаються з пневматичного виконавчого механізму і регулюючого органу.
Для регулювання витрат рідин і газів використовують дросельні регулюючі органи: односідельні, двохсідельні і діафрагмові клапани, а також поворотні заслінки.
При регулюванні рухливий пристрій мембранного виконавчого механізму призводить до зміни прохідного перетину регулюючого органу, а отже, до зміни його гідравлічного опору, тобто до зміни протікає через нього матеріального потоку.
Основними показниками, що визначають розміри і конструкцію дросельного регулюючого органу, є умовна пропускна здатність і умовний прохід.
Під пропускною здатністю регулюючого органу (  ) розуміють витрату рідини в
) розуміють витрату рідини в  щільністю 1000
щільністю 1000  , що пропускається регулюючим органом при перепаді тиску на ньому, рівному 0,1МПа. Пропускна здатність залежить від типорозміру регулюючого органу та ходу його затвора. Величину
, що пропускається регулюючим органом при перепаді тиску на ньому, рівному 0,1МПа. Пропускна здатність залежить від типорозміру регулюючого органу та ходу його затвора. Величину  виражають у . Максимальну величину пропускної здатності
виражають у . Максимальну величину пропускної здатності  , відповідну максимальному ходу затвора, для регулюючого органу певного типорозміру називають умовної пропускною здатністю. Її також виражають у
, відповідну максимальному ходу затвора, для регулюючого органу певного типорозміру називають умовної пропускною здатністю. Її також виражають у 
Умовним проходом в регулюючому органі називають номінальний діаметр проходу регулюючого органу в приєднувальних фланцях і позначають  . Значення і для конкретних типів, серійно випускаються промисловістю, наведені в довідковій літературі.
. Значення і для конкретних типів, серійно випускаються промисловістю, наведені в довідковій літературі.
У промислових умовах зазвичай застосовують клапани з умовним проходом  і умовної пропускною здатністю
і умовної пропускною здатністю  .
.
До основних параметрів, що характеризує регулюючі органи, відносять також умовний тиск, температуру регульованого середовища і перепад тиску на регулюючому органі.
Умовним тиском  називають найбільш допустимий тиск середовища на регулюючому органі при номінальній температурі.
називають найбільш допустимий тиск середовища на регулюючому органі при номінальній температурі.
Перепад тиску  на регулюючому органі визначає зусилля, на які розраховується виконавчий механізм, а також знос дросельних поверхонь.
на регулюючому органі визначає зусилля, на які розраховується виконавчий механізм, а також знос дросельних поверхонь.
Розрізняють також пропускну, конструктивну і витратну характеристики регулюючого органу.
Пропускна характеристика (внутрішня) встановлює залежність пропускної здатності регулюючого органу від переміщення  затвора
затвора  при постійному перепаді тиску.
при постійному перепаді тиску.
Конструктивна характеристика встановлює залежність зміни відносного прохідного перетину регулюючого органу від ступеня його відкриття.
Витратна характеристика визначає залежність відносної витрати середовища від ступеня відкриття регулюючого органу  , де
, де  відносний витрата середовища:
відносний витрата середовища:  поточне значення витрати середовища;
поточне значення витрати середовища;  витрата середовища при повністю відкритому регулюючому органі.
витрата середовища при повністю відкритому регулюючому органі.
Розрахунок і вибір регулюючих органів
Розрахунок регулюючих органів полягає у визначенні їх пропускної здатності за максимальною витратою середовища, що протікає через регулюючий орган, і перепаду тиску  , що виникає на регулюючому органі.
, що виникає на регулюючому органі.
Для виконання розрахунку необхідні такі вихідні дані:
а) схема технологічного ділянки трубопроводу, на якому встановлений регулюючий орган, із зазначенням довжини і внутрішнього діаметра трубопроводу, види місцевих опорів і їх кількість, а для рідин - різниці висот розташування трубопроводу;
б) тиск на початку і наприкінці технологічного ділянки;
в) максимальна і мінімальна витрата матеріального потоку;
г) характеристики матеріального потоку (температура, густина, в'язкість і т.д.).
Розрахунок виконується в такий послідовністі:
Визначення втрати тиску на цій технологічній ділянці трубопроводу при максимальній витраті, яка складається з втрати тиску на терті об стінки трубопроводу  , втрати тиску на місцевих опорах
, втрати тиску на місцевих опорах  і гідростатичного напору
і гідростатичного напору  , що характеризує витрати тиску для підйому рідини на висоту
, що характеризує витрати тиску для підйому рідини на висоту  Δвтр, мПа
Δвтр, мПа
 , (2.1)
, (2.1)
Визначення перепад тиску на регулюючому органі при максимальній витраті ΔPp.o,мПа
 , (2.2)
, (2.2)
де  тиск середовища на початку технологічного трубопроводу, мПа;
тиск середовища на початку технологічного трубопроводу, мПа;
 тиск середовища в кінці лінії, мПа;
тиск середовища в кінці лінії, мПа;
 сумарні втрати тиску середовища на технологічному ділянці трубопроводу, мПа.
сумарні втрати тиску середовища на технологічному ділянці трубопроводу, мПа.
За однією з наведених нижче формул визначають пропускну здатність регулюючого органу при максимальній витраті К для рідин
 (2.3)
(2.3)
де  максимальна витрата рідини,
максимальна витрата рідини, 
 густина рідини
густина рідини 
 перепад тиску на регулюючому органі при максимальній
перепад тиску на регулюючому органі при максимальній
 витраті, мПа.
витраті, мПа.
Для газу в до критичному режимі (  )
)
 (2.4)
(2.4)
При критичному режимі (  )
)
 (2.5)
(2.5)
де  максимальна витрата газу,
максимальна витрата газу,
перепад тиску на регулюючому органі при максимальній
витраті, мПа;
 та
та  абсолютні тиски газу, ;
абсолютні тиски газу, ;
 абсолютна температура газу перед регулюючим устроєм, К;
абсолютна температура газу перед регулюючим устроєм, К;
 безрозмірний коефіцієнт, що враховує відхилення реального газу від закону ідеального газу;
безрозмірний коефіцієнт, що враховує відхилення реального газу від закону ідеального газу;
Примітка- FH та Р1 і Р2 при Р = 0,1 мПа та Т = 273К.
Для водяної пари при до критичному закінченні (  )
)
 (2.6)
(2.6)
при критичному закінченні(  )
)
 (2.7)
(2.7)
де  максимальна витрата пари, кг/год;
максимальна витрата пари, кг/год;
перепад тиску на регулюючому органі при максимальній витраті пари, мПа;
 густини пари,
густини пари, 
Примітка- р1 та р2 при тисках до ( ) и після (  ) регулюючого органу та робочої температури перед регулюючим органом.
) регулюючого органу та робочої температури перед регулюючим органом.
Визначають умовну пропускну здатність у відповідності з умовою Кvy
 (2.8)
(2.8)
де  коефіцієнт запасу 1,2.
коефіцієнт запасу 1,2.
За значеннями  , наведеними в довідниках і каталогах, вибирають типорозмір дросельного регулюючого органу. Умовна пропускна здатність вибирається з параметричного ряду, характерного для заданого типу регулюючого органу, як найближче більше значення в порівнянні з твором максимальної пропускної здатності і коефіцієнта запасу n, тобто в порівнянні з ; діаметр умовного проходу вибирається мінімальним з можливих для знайденого значення умовної пропускної спроможності; значення умовної пропускної здатності та умовного проходу для виконавчих пристроїв деяких типів наведено в табл.2.
, наведеними в довідниках і каталогах, вибирають типорозмір дросельного регулюючого органу. Умовна пропускна здатність вибирається з параметричного ряду, характерного для заданого типу регулюючого органу, як найближче більше значення в порівнянні з твором максимальної пропускної здатності і коефіцієнта запасу n, тобто в порівнянні з ; діаметр умовного проходу вибирається мінімальним з можливих для знайденого значення умовної пропускної спроможності; значення умовної пропускної здатності та умовного проходу для виконавчих пристроїв деяких типів наведено в табл.2.
При мало в’язких рідинах, коли критерій  розрахунок вважають закінченим; при значеннях
розрахунок вважають закінченим; при значеннях  обираний регулюючий орган перевіряють на вплив в'язкості що протікає через нього рідини;
обираний регулюючий орган перевіряють на вплив в'язкості що протікає через нього рідини;
Визначають ступінь відкриття регулюючого органу при мінімальній та максимальній витраті матеріального потоку за формулою η, %
 (2.9)
(2.9)
де  розрахункове значення умовної пропускної здатності;
розрахункове значення умовної пропускної здатності;
 табличне значення умовної пропускної здатності для обраного регулюючого органу.
табличне значення умовної пропускної здатності для обраного регулюючого органу.
Втрати тиску на конкретній технологічній ділянці повинні бути задані; якщо ці величини не відомі, то їх необхідно визначити.
Втрати тиску (напору) в трубопроводі на тертя, швидкісний напір і місцеві опори (Па) визначають за формулою ΔРвтр,Па
 (2.10)
(2.10)
де  коефіцієнт тертя;
коефіцієнт тертя;
 довжина трубопроводу, м;
довжина трубопроводу, м;
 сума коефіцієнтів місцевих опорів;
сума коефіцієнтів місцевих опорів;
густина середовища, що протікає по трубопроводу, ;
W - швидкість потоку, м/с.
Примітка- Коефіцієнт тертя  залежить від числа Рейнольдса і може бути визначений за відповідними формулами.
залежить від числа Рейнольдса і може бути визначений за відповідними формулами.
При ламінарному режимі (  )
)

При турбулентному режимі коефіцієнт визначають за формулою Блазіуса

(формула дійсна при  ) або за формулою Філоненка
) або за формулою Філоненка
(формула дійсна при будь-яких значеннях  ).
).
Число Рейнольдса розраховують за формулою Rе
 (2.11)
(2.11)
де W - швидкість потоку, м/с;
 діаметр трубопроводу, м;
діаметр трубопроводу, м;
густина середовища,  ;
;
 динамічна в’язкість середовища,
динамічна в’язкість середовища, 
Втрату напору (Па) (у разі підйому рідини на висоту h) визначають за формулою ΔPh ,Па
 , (2.12)
, (2.12)
де густина середовища, ;
 прискорення вільного падіння,
прискорення вільного падіння, 
 різниця рівнів верхньої і нижньої відміток трубопроводу, м.
різниця рівнів верхньої і нижньої відміток трубопроводу, м.
Приклад розрахунку виконавчого механізму наведено в Додатку A
2.5 Розрахунок оптимальних налаштувань регулятора АСР
Наводиться спрощена структурна схема регулювання параметру, який визначений завдання, і обирається керівником проекту або самостійно з обов’язковим погодженням з керівником. Коротко описуються її складові. Як показано на рисунку 2.1.
А також наводиться структурна схема з передаточними функціями, як показано на рисунку 2.2.
Приклад 1

Рисунок 2.1- Спрощена структурна схема системи регулювання.
На малюнку ОР – об’єкт регулювання; ВП – вимірювальний перетворювач; Р – регулятор; ЕПП – електропневматичний перетворювач; ВМ – виконавчий механізм; РО – регулюючий орган; Q – регульована координата (концентрація), U – сигнал завдання, х – відхилення (розузгодження), μ – сигнал керування; zекв – еквівалентне збурення.
Приклад 2
Кожен елемент системи має свою передаточну функцію, тому структурна схема системи через передаточні функції елементів виглядатиме так, як на
рисунку 2.2.
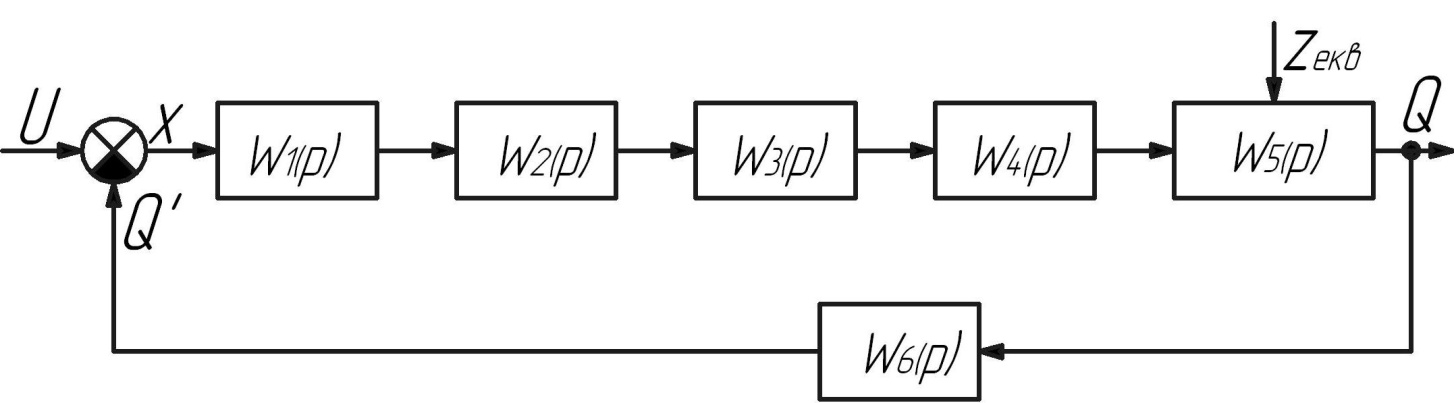
Рисунок 2.2 - Структурна схема системи через передаточні функції елементів.
де Wi(s) – передаточні функції відповідних елементів схеми.
Беручи до уваги статичні та динамічні характеристики об’єкта регулювання для вибраного типу перехідного процесу потрібно задати деякі параметри перехідного процесу: точність регулювання параметру має бути високою, отже похибка в динамічному режимі має бути мінімальною  ; враховуючи те, що об’єкт регулювання може мати досить велику сталу часу та запізнення, час регулювання має бути невеликим; перерегулювання не повинно перевищувати 10%, оскільки велике перерегулювання негативно впливає на процес.
; враховуючи те, що об’єкт регулювання може мати досить велику сталу часу та запізнення, час регулювання має бути невеликим; перерегулювання не повинно перевищувати 10%, оскільки велике перерегулювання негативно впливає на процес.
Закон регулювання регулятора вибирають з урахуванням особливостей об’єкта і заданих параметрів якості перехідного процесу. Динамічні характеристики конкретного об’єкту і збурення, що надходять на нього характеризуються своїми законами зміни. Активно впливати на них в процесі експлуатації неможливо. З огляду на це, для досягнення необхідної якості регулювання при вибраному типовому перехідному процесі необхідно прийняти відповідний закон регулювання і знайти параметри настроювань регулятора. Реально закон регулювання регулятора визначається за вимогами якості регулювання технологічного процесу. Проаналізувавши вимоги, які ставляться до якості регулювання обраного параметра та характеристики об’єкту регулювання, можна прийти до висновку, що необхідно використати (неперервний ПІД-закон регулювання або який задовольняє вимоги системи). Навести обґрунтування вибору закону приклад 1.
Приклад 1
Цей вибір обґрунтовується тим, що величина відношення часу запізнення  до сталої часу об’єкта
до сталої часу об’єкта  знаходиться в межах:
знаходиться в межах:  , тобто в цьому випадку вибирають неперервний закон регулювання. Крім цього пропорційний закон регулювання нас не влаштовує, оскільки допустима межа відхилення технологічного параметра невелика, то статична похибка може перевищити допустиму межу зміни регульованого параметра. Щоб цього уникнути в закон регулювання необхідно ввести інтегральну складову. Зважаючи на те, що наш об’єкт регулювання має досить великі час запізнення та постійну часу, для зменшення часу перехідного процесу в закон регулювання потрібно ще ввести диференційну складову. Отже в результаті викладених вище міркувань для забезпечення необхідної якості регулювання вибирається неперервний ПІД-закон регулювання.
, тобто в цьому випадку вибирають неперервний закон регулювання. Крім цього пропорційний закон регулювання нас не влаштовує, оскільки допустима межа відхилення технологічного параметра невелика, то статична похибка може перевищити допустиму межу зміни регульованого параметра. Щоб цього уникнути в закон регулювання необхідно ввести інтегральну складову. Зважаючи на те, що наш об’єкт регулювання має досить великі час запізнення та постійну часу, для зменшення часу перехідного процесу в закон регулювання потрібно ще ввести диференційну складову. Отже в результаті викладених вище міркувань для забезпечення необхідної якості регулювання вибирається неперервний ПІД-закон регулювання.
Знайти передаточні функції всіх елементів системи Приклад 4.
Приклад 4
Передаточна функція ПІД-регулятора W1(s)
 , (2.13)
, (2.13)
де  - коефіцієнти передачі відповідно пропорційної, інтегральної та диференційної складової ПІД-регулятора;
- коефіцієнти передачі відповідно пропорційної, інтегральної та диференційної складової ПІД-регулятора;
Р- передаточна функція об’єкта регулювання має вигляд W5(s)

де  – коефіцієнт передачі реактора по каналу регулювання;
– коефіцієнт передачі реактора по каналу регулювання;
Т5 – стала часу об’єкта;
τ – час запізнення, с;
Дослідити систему за двома каналами: х→Q – канал відхилення (завдання) та z→Q – канал збурення, де U – завдання, x – відхилення, z – збурення, Q – вихідна регульована координата (параметр за завданням) за прикладом 2
Приклад 2
Відповідні передаточні функції по цих каналах будуть мати вигляд
Розрахувати оптимальні настроювання вибраного ПІД-регулятора за допомогою комп’ютерної програми MatLab. Для цього необхідно в пакеті Simulink побудувати структурну модель системи регулювання та використати блок NCD Outport, який саме і визначає необхідні оптимальні параметри настроювання регулятора, тобто коефіцієнти , яким попередньо присвоїти початкові значення. У вікні настройки блока NCD Outport задати параметри перехідного процесу.
Для здійснення оптимізації задати наступні попередні значення коефіцієнтів пропорційної, інтегральної та диференціальної складових
Модель в MatLab Приклад 5
Приклад 5

Рисунок. 2.3- Модель системи регулювання для пошуку оптимальних настроювань регулятора в Simulink.
Отримати перехідну характеристику при оптимізації настроювань регулятора приклад 3
Приклад 3
При пошуку та оптимізації настроювань регулятора отримали вигляд перехідну характеристику, яка представлена на рисунок 2.4:
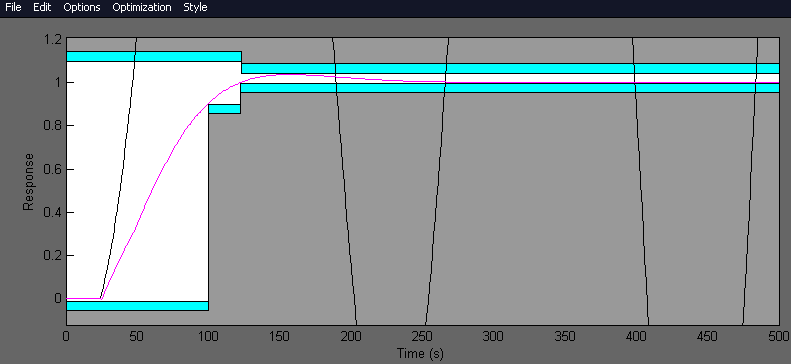
Рисунок 2. 4- Перехідна характеристика при оптимізації настроювань регулятора
В результаті оптимізації ми отримали такі оптимальні настроювальні параметри регулятора:
Після введення розрахованих вище параметрів настройки регулятора (PID Controllera) та задання параметрів інших елементів системи потрібно проемулювати роботу системи. Результатом емуляції роботи моделі повинен бути графік перехідної характеристики системи регулювання. Ця характеристика зображена в прикладі 3.
Приклад 3
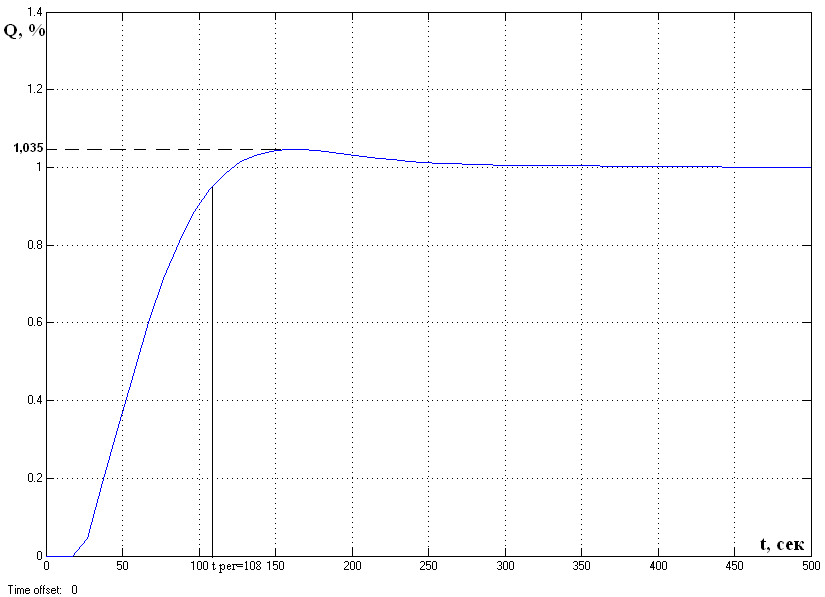
Рисунок 2.5- Графік перехідної характеристики системи регулювання
2.6 Аналіз показників якості перехідних процесів САР
Показниками якості перехідного процесу є :
- час запізнення  ;
;
- час регулювання tрег;
- величина перерегулювання  ;
;
- динамічна (усталена) похибка  ;
;
- коливальність n;
Показники якості перехідного процесу визначити із графіка перехідного процесу рисунок 2.5
τ=23 с.
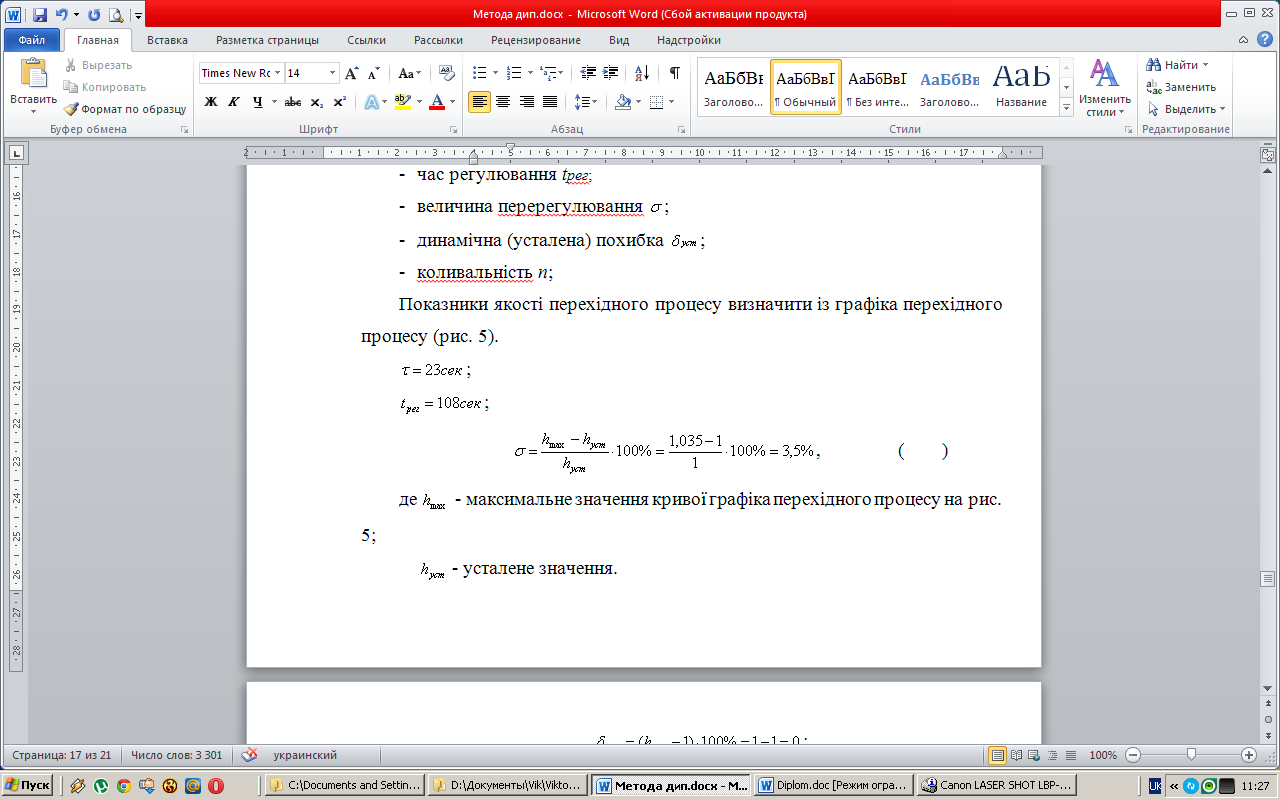 tрег=108 с.
tрег=108 с.
, (2.17)
де  - максимальне значення кривої графіка перехідного процесу;
- максимальне значення кривої графіка перехідного процесу;
σ - показник якості перехідного процесу;
 - усталене значення.
- усталене значення.
 Примітка-Максимальне значення кривої графіка перехідного процесу визначається з рисунку 2.5
Примітка-Максимальне значення кривої графіка перехідного процесу визначається з рисунку 2.5
, (2.18)
n=0.
Проаналізувати показники якості перехідних процесів проектованої САР зробити висновок, (вказати стійкість системи, перерегулювання, час регулювання).
3 МОНТАЖ ТА ЕКСПЛУАТАЦІЯ ТЕХНІЧНИХ ЗАСОБІВ АВТОМАТИЗАЦІЇ
3.1 Організація робіт з монтажу та експлуатації технічних засобів автоматизації
Основні задачі і організація служби експлуатація систем автоматизації. Основні задачі експлуатації систем автоматизації. Структура служби метрології і автоматизації підприємства. Особливості організації служби автомтизованих систем керування.
Головною задачею експлуатації систем автоматизації є забезпечення надійної і правильної роботи окремих ланок і всього комплексу технічних засобів автоматизації. Вирішують цю задачу за допомогою безперервного нагляду за роботою пристроїв контролю і автоматики і своєчасним усуненням усіх виникаючих дефектів. Для вирішення такої задачі на кожному підприємстві організується спеціальна служба чи служби. Роботи, які виконує служба, можна розподілити на три основні групи:
- поточна експлуатація при нормальній роботі установки;
- ремонтні роботи та монтажні роботи;
- пуско-налагоджувальні роботи.
Побудова конкретної структурної схеми служби автоматизації будь-якого підприємства і визначення чисельності персоналу служби залежить від структури підприємства, його потужності, а також кількості і складності засобів автоматизації, експлуатованих на підприємстві. На підприємствах служба експлуатації систем автоматизації організується у вигляді служби метрології і автоматизації (СМіА).
СМіА на підприємстві створюють у вигляді лабораторії, очолюваної головним метрологом, який підпорядкований головному інженеру підприємства, причому у склад лабораторії входять ланки які вирішують задачі:
1) метрологічного забезпечення виробництва;
2) технічного обслуговування технічних засобів автоматизації (ТЗА) і засобів вимірювання і автоматизації (ЗВА) згідно графіку планово-попереджуваьного ремонту;
3) ремонту та монтажу технічних засобів автоматизації.
3.2 Монтаж технічних засобів автоматизації та регулюючих органів
В роздiлi обґрунтовується вибір місця розміщення центрального пункту керування (ЦПК) i місцевих щитів (пультів). Аргументується вибір типу щитів (пультів), а також їх компонування , виходячи з умов ергономiки, техніки безпеки та економічної доцiльностi. Розглядаються питання монтажу щитів (пультів), комутації їх з іншою апаратурою .
В роздiлi також розглядаються: способи монтажу локальних засобів автоматики, зокрема, схеми розміщення давачів i виконавчих механiзмiв у виробничому примiщеннi, з врахуванням їх захисту вiд корозії, атмосферних впливів тощо, способи прокладання трубних i електричних проводок поблизу технологічного обладнання, на пiдвiсах, в траншеях, при проходi через стiни тощо.
Текст доцiльно супроводжувати ескiзами та вiдповiдними посиланнями на монтажнi креслення графiчної частини проекту.
3.3 Налагодження технічних засобів автоматизації
В даному розділі потрібно охарактеризувати стадії налагоджувальних робіт. Особливу увагу приділити налагодженню автоматичних систем регулювання на об’єкті. Описати алгоритм проведення налагодження автоматичної системи регулювання (за завданням керівника проекту або для найважливішої АСР). Для мікропроцесорних систем навести особливості технологічного програмування, керуючись монтажно-експлуатаційними інструкціями заводів-виробників приладів.
3.4 Експлуатація технічних засобів автоматизації
Ремонт та повірка засобів вимірювання та технічних засобів автоматизації. Ремонт приладів. Задачі та види повірки. Періодичність повірки, її проведення та оформлення результатів.
Основною задачею технічного обслуговування є безперервний нагляд за роботою пристроїв контролю і автоматики та створення умов, які забезпечують справність, працездатність і необхідний ресурс ЗВА у період їх експлуатації.
Описати виконання робіт технічного обслуговування технічних засобів автоматизації.
Проведення ремонту технічних засобів автоматизації та засобів вимірювання може бути плановим, який проводять за графіками ППР, та позаплановий. Необхідність планового ремонту визивається головним чином поступовим зміненням їх характеристик у процесі експлуатації, що з часом призводить до зниження точності нижче допустимої. Необхідність у позаплановому ремонті виникає у результаті перевантаження приладу через його неправильний вибір чи вмикання, а також через недбале поводження з приладом. Ремонт ЗВА по можливості здійснюють у період проведення ремонту основного і допоміжного устаткування.
Описати повірку засобів вимірювання.Дефекти у приладів не завжди можуть бути виявлені в процесі екслуатації, оскільки поступове змінення точності показань і якості роботи приладу здебільшого не притягає увагу персоналу. Тому необхідно систематично і планомірно перевіряти технічні характеристики приладів. Перевіряти також слід прилади після ремонту. Повірка дає можливість, установити відповідність приладу вимогам, установленим для нього нормами. Повірка в залежності від призначення і класу точності ЗВ може бути державною і відомчою.
Висновки
У висновках характеризують обсяг виконаної роботи та основні досягнення при розробленні теми дипломного проекту.
| <== попередня сторінка | | | наступна сторінка ==> |
| ЗАТВЕРДЖУЮ | | |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |