- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Програма роботи
Ознайомитись зі схемами керування, зображеними на рис.1.4 та рис. 1.5 і з’ясувати взаємодію і порядок роботи елементів схеми в усіх вивчаємих режимах.
Для заданого викладачем за таблицею 1.1 варіанта вихідних даних розрахувати:
– величину пускових опорів R1 та R2;
– величину опорів динамічного гальмування Rд.г.;
– величину опору ступеня противвімкнення Rг.п.;
– уставку спрацювання реле противвімкнення KV1;
– час спрацьовування реле KT1, KT2;
– постійний струм збудження Із, який подається в статор у режимі динамічного гальмування.
Для схеми, зображеній на рис.1.4, виставити у відповідності з розрахунками: витримки часу спрацювання реле часу КТ1 і КТ2, напругу спрацювання реле противвімкнення KV1. Спостерігати за роботою схеми у режимах пуску, гальмування та реверсу.
Налаштувати мікропроцесорне реле, що використовується в схемі керування, згідно розрахованих витримок часу для режимів пуску та динамічного гальмування.
Таблиця 1.1
| № варіанту | Вид пуску | Момент навантаження Мс* (в.о.) | Максимальний момент під час пуску М1* (в.о.) | Момент перемикання М2* (в.о.) | Максимальний момент під час гальмування противовмиканням Мг.п. (в.о.) | Число ступенів прискорення, m |
| Нормальний | 0,05 | - | 0,9 | 2,0 | ||
| Форсований | 0,05 | 2,1 | - | 1,8 | ||
| Нормальний | 0,05 | - | 0,8 | 1,7 | ||
| Форсований | 0,05 | 2,0 | - | 1,9 | ||
| Нормальний | 0,05 | - | 1,0 | 1,8 | ||
| Форсований | 0,05 | 2,0 | - | 1,8 | ||
| Нормальний | 0,05 | - | 1,1 | 2,0 | ||
| Форсований | 0,05 | 2,2 | - | 2,1 | ||
| Нормальний | 0,05 | - | 1,6 | 1,8 | ||
| Форсований | 0,05 | 2,5 | - | 2,2 | ||
| Нормальний | 0,05 | - | 0,8 | 2,0 | ||
| Форсований | 0,05 | 2,4 | - | 1,9 |
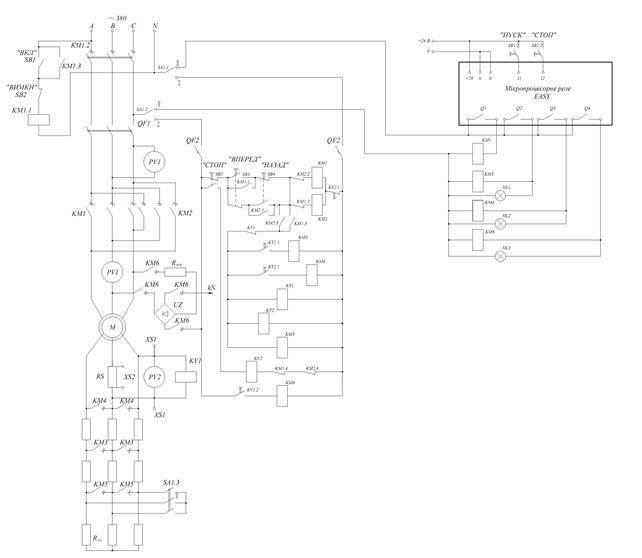
Рисунок 1.4 - Спрощена принципова схема лабораторного стенду.
Рисунок 1.5 - Принципова схема налагодження реле часу КТ1, КТ2.
Переглядів: 291