- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
ЗРІВНЮВАННЯ СИСТЕМИ ВИМІРЯНИХ ВЕЛИЧИН, ПОВ’ЯЗАНИХ УМОВАМИ, З ДОДАТКОВИМИ НЕВІДОМИМИ
Розглянемо цей спосіб стосовно до зрівнювання мереж полігонометрії. Мережа полігонометрії включає вихідні і шукані пункти. Серед шуканих пунктів слід особливо виділити вузлові точки.
Ходи полігонометрії можуть бути трьох видів:
- хід між двома вихідними пунктами (рис. 12.1 а);
- хід між вихідним пунктом і вузловою точкою (рис. 12.1 б);
- хід між двома вузловими точками (рис. 12.1 в);
| . |
| . |
| а |
| . |
| б |
| в |
Рис. 12.1 – Полігонометричні ходи
У кожному ході вимірюється n сторін і  кутів. Загальне число вимірів становить
кутів. Загальне число вимірів становить  . З іншого боку хід з n сторін включає
. З іншого боку хід з n сторін включає  шуканих точок, тобто необхідно визначити
шуканих точок, тобто необхідно визначити  координат.
координат.
Таким чином, число надлишкових вимірів дорівнюватиме

Отже, в будь-якому ході незалежно від числа шуканих точок виникає тільки три умовні рівняння.
Будемо вважати, кути  виміряними незалежно і рівноточно. Сторони
виміряними незалежно і рівноточно. Сторони  також виміряними незалежно і рівноточно, що практично має місце, якщо лінії виміряні світлодальноміром, а сторони мають приблизно однакову довжину.
також виміряними незалежно і рівноточно, що практично має місце, якщо лінії виміряні світлодальноміром, а сторони мають приблизно однакову довжину.
Так як кути і довжини сторін – об'єкти різного роду, виміри у полігонометрії у загальному випадку – нерівноточні. Звідси виникає необхідність встановлення відносних ваг кутових і лінійних вимірів.
Прийнявши ваги вимірюваних кутів рівними одиниці, тобто  , відповідно з формулами (6.1) і (6.2) з ваги вимірюваних сторін будуть дорівнювати:
, відповідно з формулами (6.1) і (6.2) з ваги вимірюваних сторін будуть дорівнювати:

де  і
і  – стандарти, що характеризують точність вимірювання кутів і довжин сторін відповідно. Ці величини для відповідного класу (розряду) полігонометрії встановлюються нормативними документами. Стосовно до нормативів розробляється методика виконання кутових і лінійних вимірів.
– стандарти, що характеризують точність вимірювання кутів і довжин сторін відповідно. Ці величини для відповідного класу (розряду) полігонометрії встановлюються нормативними документами. Стосовно до нормативів розробляється методика виконання кутових і лінійних вимірів.
Ваги  мають розмірність
мають розмірність  .
.
Зрівнювання полігонометричного ходу розглянемо на найбільш загальному прикладі ходу між двома вузловими точками, маючи на увазі, що інші два види – окремі випадки від загального.
Отже, в ході виникає три умовних рівняння:
1. Рівняння кутів

де  – поправки в виміряні кути,
– поправки в виміряні кути,  ,
,  – поправки в наближені дирекційні кути початкових і кінцевих сторін ходу відповідно,
– поправки в наближені дирекційні кути початкових і кінцевих сторін ходу відповідно,
– кутова нев’язка ходу,  – наближені значення дирекційних кутів початкових і кінцевих сторін ходу відповідно.
– наближені значення дирекційних кутів початкових і кінцевих сторін ходу відповідно.
2. Умова абсцис
3. Умова ординат
У цих висловлюваннях прийняті наступні позначення:
 ,
, 
 ,
,  ,
,  ,
,  – поправки до наближених координат початкової та кінцевої точки ходу,
– поправки до наближених координат початкової та кінцевої точки ходу,
 ;
;  – нев’язки в приростах координат,
– нев’язки в приростах координат,  ,
,  – приріст координат,
– приріст координат,  ,
,  ,
,  ,
,  – наближені координати початкової і кінцевої точок ходу.
– наближені координати початкової і кінцевої точок ходу.
Приріст координат  ,
,  – функції виміряних сторін і кутів
– функції виміряних сторін і кутів  ,
,  , а тому величини залежні.
, а тому величини залежні.
Ось чому друге і третє умовне рівняння необхідно перетворити, представивши поправки до приростів координат через поправки виміряних кутів та сторін.Опускаючи перетворення, запишемо ці рівняння:

 (12.2)
(12.2)

 . (12.3)
. (12.3)
Умовні рівняння (12.1), (12.2), (12. 3) окрім поправок до безпосередньо виміряних кутів і довжин сторін містять також поправки до наближених дирекційних кутів  і поправки до наближених координат , ,
і поправки до наближених координат , ,  тобто до функцій виміряних величин, як це має місце в параметричному способі. Таким чином, ми маємо справу з поєднанням способу вимірів, пов'язаних умовами, і параметричного способу.
тобто до функцій виміряних величин, як це має місце в параметричному способі. Таким чином, ми маємо справу з поєднанням способу вимірів, пов'язаних умовами, і параметричного способу.
Врівноваження такого роду систем отримало назву спосіб умов з додатковими невідомими.
Розглянемо його більш детально в загальному вигляді. Нехай є система r рівнянь, що включає n поправок і t додаткових невідомих:
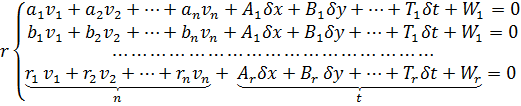 (12.4)
(12.4)
або в матричному вигляді:
 .
.
Так як  , де r – число умовних рівнянь, n – число вимірів, t – число додаткових невідомих, система не має єдиного розв’язання.
, де r – число умовних рівнянь, n – число вимірів, t – число додаткових невідомих, система не має єдиного розв’язання.
Для розв’язання під умовою [v2] = min запишемо функцію Лагранжа:





Взявши часткові похідні за змінними 
 ,…,
,…,  одержимо систему рівнянь наступного вигляду
одержимо систему рівнянь наступного вигляду


 або
або 

Диференціюючи ту ж систему по змінним δx, δy,…, δt і прирівнявши часткові похідні до нуля, отримаємо систему рівнянь
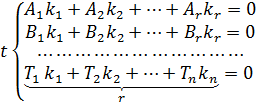 або
або 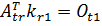 (12.6)
(12.6)
Підставимо v з (12.5) в (12.4), приєднаємо до неї систему (11.6), отримаємо матричне рівня (12.7)

яке складається з наступних блоків

Розв’язавши систему (12.7)

знаходимо кореляти k та поправки до додаткових невідомих δ.
Так як матриця включає нульовий блок, діагональні елементи матриці G-1, які відповідають цьому блоку стають негативними.
Підставивши кореляти в (12.5), отримаємо поправки до виміряних величин – кутів і довжин сторін. Контроль обчислень здійснюється шляхом підстановки зрівняних значень виміряних величин і додаткових невідомих у вирази для обчислення вільних членів (нев'язок) умовних рівнянь. У результаті повинні виходити нулі.
Середня квадратична похибка одиниці ваги в цьому способі зрівнювання обчислюється за формулою:
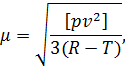
а її надійність – за формулою:
де R – кількість ходів, T – кількість вузлових точок.
Таким чином, на прикладі зрівнювання мережі полігонометрії розглянуто корелатний спосіб зрівнювання систем вимірюваних величин, пов’язаних умовами з додатковими невідомими.
Додаток|застосування| А
| <== попередня сторінка | | | наступна сторінка ==> |
| І дирекційні кути яких відомі | | | ТЕЗАУРУС |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |