- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Кінематичний аналіз споруд
Інженерна споруда, яка складається з окремих елементів, може сприймати навантаження тільки в тому випадку, коли вона постійно зберігає геометричну форму і положення, які задані їй при зведенні (бути нерухомою і незмінною). Змінність системи– її властивість змінювати свою геометричну форму без деформації матеріалу елементів споуди. Змінні системи не в змозі врівноважити зовнішні сили і під дією прикладених навантажень приходять в рух, міняють свою форму
 |
Природно, що такі системи не можна використовувати як споруди. Геометрично незмінна система – це така система, форма якої не може мінятися без деформації матеріалу її елементів. Елементи споруди, незмінність яких очевидна або доведена, називаються дисками (стержень, земля). Рухоме з’єднання двох дисків, яке обмежує взаємне їх переміщення, називається кінематичною в’яззю.
Якщо замінити жорсткі вузли системи, що складається з трьох стержнів (зображеної на рис. 1.7, а), циліндричними шарнірами, то система залишиться геометрично незмінною (рис. 1.7, б), тобто такою, зміна форми якої можливо лише в зв'язку з деформаціями її елементів.
Якщо ж замінити жорсткі вузли шарнірами в системі, що складається з чотирьох стержнів (зображеної на рис. 1.8, а), то вийде система геометрично змінна (рис. 1.8, б), тобто така, форма якої може мінятися без деформації її елементів.
Найпростішою геометрично незмінною шарнірною системою (фермою) є система з трьох стержнів (дисків), з'єднаних шарнірами в трикутник (рис. 1.7, б).
Якщо замінити жорсткі вузли системи, що складається з трьох стержнів (зображеної на рис. 1.7, а), циліндричними шарнірами, то система залишиться геометрично незмінною (рис. 1.7, б), тобто такою, зміна форми якої можливо лише в зв'язку з деформаціями її елементів.
Якщо ж замінити жорсткі вузли шарнірами в системі, що складається з чотирьох стержнів (зображеної на рис. 1.8, а), то вийде система геометрично змінна (рис. 1.8, б), тобто така, форма якої може мінятися без деформації її елементів.
Найпростішою геометрично незмінною шарнірною системою (фермою) є система з трьох стержнів (дисків), з'єднаних шарнірами в трикутник (рис. 1.7, б).
Положення точки на площині визначається двома параметрами (рис. 1.9.а), тобто ступінь вільності точки на площині дорівнює двом. Щоб визначити положення відрізка на площині, потрібно знати три незалежних параметри (рис. 1.9.6). Якщо на довільній плоскій фігурі провести відрізок, (рис. 1.9.в) то стає очевидним, що і для визначення положення плоскої фігури на площині потрібно знати три незалежних параметри; з цього випливає, що ступінь вільності плоскої фігури на площині дорівнює трьом. Ступінь вільності можна обмежити різними пристроями (в'язями), які зменшують кількість незалежних параметрів руху тіла чи системи тіл.

Рис.1.9
Пристрій, який зменшує ступінь вільності на одиницю, еквівалентний одній кінематичній в'язі. Таким пристроєм є вже розглянута нами шарнірно-рухома опора. Рухомий шарнір еквівалентний одній кінематичній в'язі, тому що не перешкоджає ні взаємному повороту елементів, ні просторовому їх переміщенню.
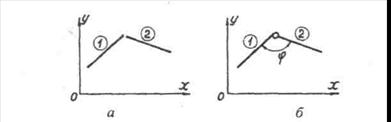
Рис.1.10
Нерухомий опорний шарнір накладає на тіло дві в'язі, чим і пояснюється символічне зображення двома опорними стержнями шарнірно-нерухомої опори. Шарнір, який з'єднує два плоских тіла,наприклад два стержні, характеризується як пристрій з двома кінематичними в'язями. Для наочного тлумачення сказаного вище стержні 1 і 2 (рис. 1.10.а) з'єднаємо шарніром С (рис. 1.10.б). Якщо для визначення положення першої системи (а) потрібно знати шість незалежних геометричних параметрів (по три на кожний стержень), то для другої - чотири. При відомому розташуванні в системі ХОУ першого стержня - положення другого в довільний момент часу визначається кутом ер. Ступінь вільності за рахунок шарнірного з'єднання двох стержнів зменшилась з шести до чотирьох.

Рис.1.11 С =.
Якщо длявизначення ступеня вільності системи, зображеної на (рис. 1.11.а), умовно роз'єднати шарнірні з'єднання, то для визначення положення трьох стержнів в системі ХОУ (рис. 1.11.б) потрібно знати дев'ять геометричних параметрів. Кожен шарнір накладає дві кінематичні в'язі. За рахунок трьох з'єднувальних шарнірів накладено шість кінематичних в'язей. Ступінь вільності заданої системи дорівнює трьом. З іншої сторони, задана в нашому прикладі система являє собою трикутник,форма якого, як відомо, не може бути змінена без зміни довжин сторін. Цей трикутник можна розглядати як плоске тіло, ступінь вільності якого і дорівнює трьом.
Ступінь вільності системи, утвореної чотирма стержнями, зв'язаними шарнірними з'єднаннями в прямокутник (рис. 11 .а), дорівнює чотирьом.
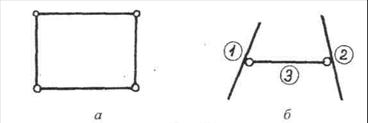
Рис.1.12
Про властивість шарнірно-рухомої опори накладати одну кінематичну в'язь, вже було сказано. Якщо два плоских тіла (два стержні) з'єднати стержнем, на кінцях якого ідеальні шарніри (рис. 1.12.6), то і в цьому випадку буде накладено одну кінематичну в'язь. На рис. 1.12.6 з'єднувальний стержень під номером три. Довести цю властивість пропонується самостійно.
Стержнева система - це сукупність певного числа стержнів (два основних розміри яких малі порівняно з третім), з'єднаних між собою відповідним чином в'язями.
Ступінь вільності системи, складеної з дисків, з'єднаних між собою шарнірами, визначається наступним чином. Якщо число дисків позначити Д, а ступінь вільності кожного диска дорівнює трьом, то розміщені на площині диски будуть мати ступінь вільності рівний ЗД.. Враховуючи, що кожен простий шарнір, число яких позначимо Ш, зменшує ступінь вільності на два, а кожен опорний стержень(опорна в'язь, число яких позначимо С0) - на одиницю, то загальнаступінь вільності (W) стержневої системи визначиться за формулою:
W=ЗД-2Ш-С0 . (1)
Можливі три якісно різні результати:
1. W > 0 – система немає достатньої кількості в’язей -геометрично змінна, має рух;
2. W = 0 – система має достатнью кількость в’язей, необхідну для забезпечення геометричної незмінності і нерухомості;
1. W = 0 – система незмінна, має зайву кількость в’язей, число яких n = - W.
Для правильного застосування формули (1) потрібно розрізняти шарніри прості – з’єднують два диски, і кратні - з’єднують більше двох дисків. Число простих шарнірів Ш в кратному визначається числом з’єднаних в ньому дисків (стержнів) Д зменшеним на одиницю – Ш=2Д-1.
 Співвідношення W=ЗД-2Ш-С є необхідною, але ще недостатньою умовою незмінюваності споруд. Так ферма, показана на рис. 1.13,а, геометрично змінювана, хоча ступінь вільності W=ЗД-2Ш-С = 3*13-2*18-3=0;; на рис. 1.13.,б зображена змінювана ферма, для якої W=ЗД-2Ш-С=. С =. 3*14-2*20-3=-1. Змінюваність цих ферм пояснюється тим, що праві їхні частини - шарнірні чотирикутники. Отже стержневі системи, що задовільняють умову W=ЗД-2Ш-С , можуть бути миттєво змінюваними.
Співвідношення W=ЗД-2Ш-С є необхідною, але ще недостатньою умовою незмінюваності споруд. Так ферма, показана на рис. 1.13,а, геометрично змінювана, хоча ступінь вільності W=ЗД-2Ш-С = 3*13-2*18-3=0;; на рис. 1.13.,б зображена змінювана ферма, для якої W=ЗД-2Ш-С=. С =. 3*14-2*20-3=-1. Змінюваність цих ферм пояснюється тим, що праві їхні частини - шарнірні чотирикутники. Отже стержневі системи, що задовільняють умову W=ЗД-2Ш-С , можуть бути миттєво змінюваними.
Миттєво змінювана система – це система з’єднання дисків (стержнів), які допускають без деформації матеріалу безкінечно малі переміщення дисків (стержнів) в перший момент прикладення навантаження, після чого система стає незмінною. В миттєво змінюваних системах при дії довільного навантаження виникають безкінечно великі зусилля або невизначеної величини.
 |
Розглянемо систему з двох стержнів (рис. 1.14), що лежать на одній прямій і з'єднують вузол С з двома нерухомими точками А и В.
Якщо роз'єднати стержні АС і ВC у точці C, то кінець C стержня АС переміститься по колу m - m, а кінець C стержня ВC - по колу n - n. Ці кола в точці C мають загальну дотичну. Отже, якщо точка C одного зі стержнів одержить досить мале переміщення по перпендикуляру до АВ, то інший стержень не зможе перешкодити цьому переміщенню. Таким чином, розглянута система є геометрично змінюваною, тому що її форма може мінятися при незмінній довжині стержнів, тобто при відсутності деформацій її елементів.
Система з двома стержнями, що лежать на одній прямій (див. рис. 1.14), надалі будемо називати миттєво змінною тому, що вона в наступну мить після малого переміщення точки C по перпендикулярі до прямої АВ перетворюється в незмінну систему.
Інша картина виходить, якщо стержні АС і ВС не лежать на одній прямій (рис. 1.15); у цьому випадку кола m–m і n–n не мають загальної дотичної, а тому навіть досить мале переміщення вузла C неможливо без деформації стержнів. Таким чином, всякий новий вузол, що додається в процесі утворення геометрично незмінної системи, може бути приєднаний за допомогою двох стержнів, осі яких не повинні лежати на одній прямій.
Отже, системи, отримані із шарнірного трикутника шляхом послідовного приєднання вузлів, причому кожного двома стержнями, що не лежать на одній прямій, геометрично незмінні, тобто геометрична структура їх незмінна. Такі системи (або ферми) називають найпростішими, на відміну від складних, які утворюються, зазвичай, в результаті видозміни найпростіших.
Перейдемо тепер до питання про приєднання геометрично незмінної системи до землі за допомогою опор.
 |
Найчастіше споруда (диск) опирається на дві шарнірні опори, одна з яких нерухома, інша рухома (рис. 1.16, а). Такий зв'язок споруди з землею забезпечує йому геометричну незмінюваність. Не обов'язково, щоб два з трьох опорних стержнів з”єднувалися одним загальним шарніром; стержні геометрично незмінної системи можуть і не мати загальних шарнірів (рис. 1.16,б).
Якщо всі опорні стержні розміщенні так, що їхні напрямки перетинаються в одній точці О (рис. 1.17, а), то ця точка є миттєвим центром, навколо якого система може робити безкінечно мале обертальне переміщення. Після такого переміщення всі опорні стержні вже не будуть перетинатися в одній точці і тому подальші переміщення будуть неможливі без деформації стержнів. Система, прикріплена до землі подібним чином, має миттєву змінність; тому таке розташування стержнів неприпустимо. Таким чином, прикріплення системи до землі за допомогою трьох стержнів можливо лише в тому випадку, коли осі цих стержнів не перетинаються в одній точці і не паралельні один одному.
Поширюючи це положення на випадок взаємного з'єднання двох будь-яких геометрично незмінних систем (дисків), можна сформулювати наступне правило: два диски утворять геометрично незмінну систему, якщо вони зв'язані між собою за допомогою трьох стержнів, осі яких не перетинаються в одній точці і не паралельні між собою (спосіб Шухова).
Якщо в точці перетинання напрямків будь-яких двох з цих трьох стержнів поставити шарнір і з'єднати його з диском, то система не стане геометрично змінною, але це дасть можливість розглядати її як систему, що складається з двох дисків І і ІІ, зв'язаних один з одним одним загальним шарніром А і стержнем В (рис. 1.17,б). Отже, до диска можна геометрично незмінно приєднати інший диск за допомогою загального для обох дисків шарніра і стержня, напрямок якого не повинен проходити через цей шарнір (спосіб Полонсо).

Зчленування трьох дисків в одну загальну геометрично незмінну систему можна здійснити, з'єднавши їх у трикутник за допомогою трьох шарнірів, не розташованих на одній прямій (рис. 1.18), або за допомогою шести стержнів, як це показано на рис. 1.19 тому, що кожний шарнір може бути замінений двома стержнями, що перетинаються в його центрі.
 Система, зображена на рис. 1.20, миттєво змінювана тому, що точки перетину осей стержнів, що зв'язують кожну пару дисків, лежать на одній прямій.
Система, зображена на рис. 1.20, миттєво змінювана тому, що точки перетину осей стержнів, що зв'язують кожну пару дисків, лежать на одній прямій.
Отже, три диски, з'єднані за допомогою шести стержнів так, що між кожною парою дисків установлено по два стержні, точки перетину яких не лежать на одній прямій, утворюють нову геометрично незмінну систему.
Загальний висновок незмінності стержневих систем: якщо система може бути зведена до шарнірного трикутника, то вона геометрично незмінна
Порядок проведення кінематичного аналізу споруд:
- вибір розрахункової схеми споруди;
-визначення числа ступенів вільності системи;
- виділення незмінних частин споруди – дисків;
-.проведення аналізу з’єднань дисків між собою.
Тема 2. Розрахунок балок та простих рам на нерухоме навантаження
Читайте також:
- ABC-XYZ аналіз
- II. Багатофакторний дискримінантний аналіз.
- SWOT-аналіз у туризмі
- SWOT-аналіз.
- Tема 4. Фації та формації в історико-геологічному аналізі
- V. Нюховий аналізатор
- АВС (XYZ)-аналіз
- Автоматизовані інформаційні системи для технічного аналізу товарних, фондових та валютних ринків.
- Алгоритм однофакторного дисперсійного аналізу за Фішером. Приклад
- Альтернативна вартість та її використання у проектному аналізі
- Аналіз активів банку
- Аналіз альтернативних рішень
| <== попередня сторінка | | | наступна сторінка ==> |
| Розрахункові схеми та основні елементи споруд | | | Загальні положення визначення внутрішніх зусиль в балках |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |