РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Порівняльні.
Кожна з них може застосовуватися для активного первинного перетворювача (на виході якого — електрорушійна сила, напруга або струм) чи для пасивного (якщо на виході — електричний опір, індуктивність або ємність).
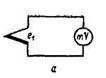
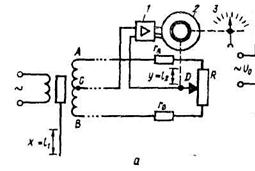
Приклад схеми безпосереднього вмикання для активного перетворювача наведено на рис. 5.1, а: мілівольтметром вимірюється електрорушійна сила  термопари. Проте показання приладу відрізняються від дійсного значення .Насправді, в цьому колі сила струму становить
термопари. Проте показання приладу відрізняються від дійсного значення .Насправді, в цьому колі сила струму становить
 , (5.1)
, (5.1)
де  — опір термопари;
— опір термопари;  — опір приладу (мілівольтметра). Показання приладу — це падіння напруги на ньому, яке становить
— опір приладу (мілівольтметра). Показання приладу — це падіння напруги на ньому, яке становить
 , (5.2)
, (5.2)
тобто відрізняється від шуканого значення на падіння напруги на самій термопарі; показання приладу дорівнювало б значенню тільки тоді, коли б струм І дорівнював нулю. Це є недоліком такої схеми.
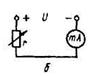
Приклад схеми безпосереднього вмикання для пасивного перетворювача наведено на рис. 5.1, б. Якщо значення U незмінне, то значення сили струму, що вимірює міліамперметр, залежить від значення вихідного опору r перетворювача. Недолік цієї схеми полягає в тому, що доводиться вимірювати повний струм у колі, тоді як корисною інформацією є тільки порівняно невеликі зміни струму.
| 
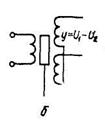
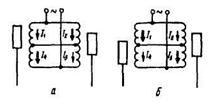
| Приклади диференціальних схем для активних перетворювачів наведено на рис. 5.2, де розглянуто два варіанти з`єднання вторинних котушок диференціальних трансформаторних перетворювачів: узгоджене (а) і зустрічне (б).
На рис. 5.2, в показано диференціальну схему для пасивних перетворювачів. Оскільки струми  та та  проходять через прилад назустріч один одному, то при проходять через прилад назустріч один одному, то при  і і  показання приладу дорівнює нулю. показання приладу дорівнює нулю.
|
| Рисунок 5.1 Схеми безпосеред-нього вмикання для активного – а; та пассивного – б перетворю-вачів. |
Якщо при зміні вимірюваної величини змінюються значення опорів  і
і  , то прилад вимірює різницю струмів
, то прилад вимірює різницю струмів  яка і є корисною інформацією про значення вимірюваної величини, що впливає на перетворювачі та .
яка і є корисною інформацією про значення вимірюваної величини, що впливає на перетворювачі та .

| 
| 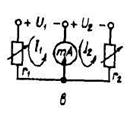
|
| Рисунок 5.2 Приклади диференціальних схем для активних перетворювачів: узгоджене (а) і зустрічне (б) з’єднання вторинних котушок. Диференціальна схема для пасивних перетворювачів, (в). |
Компенсаційна схема (рис. 5.3) — це приклад схеми порівняння для активних перетворювачів, електрорушійна сила термопари порівнюється з відомою напругою  , знятою з подільника напруги, з’єднаного з джерелом зі стабільною напругою
, знятою з подільника напруги, з’єднаного з джерелом зі стабільною напругою  . Змінюючи напругу , добиваються рівності її , тоді потенціали в точках А і В дорівнюватимуть один одному, і
. Змінюючи напругу , добиваються рівності її , тоді потенціали в точках А і В дорівнюватимуть один одному, і
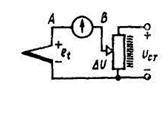
| гальванометр покаже нуль. Значення , що дорівнює (саме , оскільки в момент вимірювання струму немає), можна визначити за шкалою. Прилад, побудований на основі компенсаційної схеми, називається потенціометром.
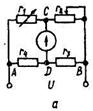
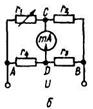
Два варіанти схеми порівняння для пасивних перетворювачів, відомих під назвою «мостових», наведено на рис. 5.4: зрівноважена (а) і незрівноважена (б). Умовою рівноваги мостової схеми є рівняння
 (5.3) (5.3)
|
| Рисунок 5.3 Компенсаційна (порівняльна) схема. Потенціометр |
За такої умови потенціали точок С і D однакові, і показання гальванометра дорівнює нулю. При зміні значень треба, відповідно змінюючи , знову досягти рівноваги, після чого обчислити шукане значення за формулою
 (5.4)
(5.4)
| 
| Результат вимірювання не залежить від коливань напруги живлення , і це — істотна перевага такої схеми.
Мостову схему можна використовувати й інакше: при змінах , не зрівноважувати схему, а вимірювати струм нерівноваги, який при незмінності , , і це — істотна перевага такої схеми.
Мостову схему можна використовувати й інакше: при змінах , не зрівноважувати схему, а вимірювати струм нерівноваги, який при незмінності ,  і і  залежить від (а також від коливань ,що є недоліком такої залежить від (а також від коливань ,що є недоліком такої
|
| Рисунок 5.4 Схеми порівняння для пасивних перетворювачів, «мостові»: зрівноважена (а) і незрівноважена (б). |
незрівноваженої схеми).
Для дистанційного передавання механічних переміщень (лінійних, кутових) використовуються системи синхронного зв’язку та слідкуючі системи.
| 
|
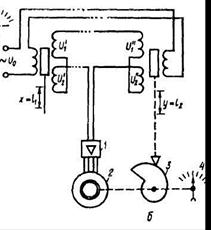
| Рисунок 5.5 Систему синхронного зв’язку на двох диференціальних індуктивних перетворювачах | Рисунок 5.6 Принцип роботи системи синхронного зв’язку на двох диференціальних індуктивних перетворювачах |
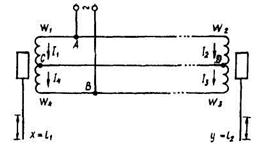
Система синхронного зв’язку забезпечує синхронізацію лінійних або кутових переміщень рухомих елементів двох електромеханічних пристроїв (механічно між собою не пов’язаних) за рахунок зусиль, що виникають безпосередньо у самих пристроях при розузгоджечні положень їхніх рухомих елементів.
У слідкуючих системах при розузгодженні положень рухомих елементів двох електромеханічних пристроїв виникає електрична напруга розузгодження; вона підсилюється й приводить у дію допоміжний електричний привод (сервопривод), який усуває розузгодження, примушуючи рухомий елемент другого пристрою повторювати положення рухомого елемента першого, що змінюється за невідомим заздалегідь законом. Систему синхронного зв’язку на двох диференціальних індуктивних перетворювачах показано на рис. 5.5. Якщо якорі обох перетворювачів перебувають у середньому положенні, то струми у всіх чотирьох котушках
 однакові. При переміщенні
однакові. При переміщенні  якоря лівого перетворювача вгору струм
якоря лівого перетворювача вгору струм  у котушці
у котушці  зростає, а струм у котушці
зростає, а струм у котушці  зменшується. Це виливає на струми та
зменшується. Це виливає на струми та  перший з них (у котушці
перший з них (у котушці  ) теж зростає, а інший (у котушці
) теж зростає, а інший (у котушці  ) —зменшується (рис. 5.6, а). Оскільки
) —зменшується (рис. 5.6, а). Оскільки 
 , то й електромагнітне зусилля
, то й електромагнітне зусилля  стане більшим, ніж
стане більшим, ніж  , тому якір правого перетворювача переміститься вгору і досягне такого самого положення, як і якір лівого. При переміщенні якоря лівого перетворювача вниз (рис. 5.6, б), і навпаки.
, тому якір правого перетворювача переміститься вгору і досягне такого самого положення, як і якір лівого. При переміщенні якоря лівого перетворювача вниз (рис. 5.6, б), і навпаки.
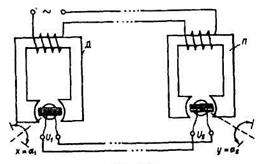
Інший різновид системи синхронного зв’язку наведено на рис. 5.7: у ній використано два трансформаторних перетворювачі з поворотною котушкою.
| 
|
| Рисунок 5.7 Система синхронного зв’язку на двох трансформаторних перетворювачах з поворотною котушкою | Рисунок 5.8 Система синхронного зв’язку на двох сельсинах |
Слідкуюча система на двох трансформаторних перетворювачах з поворотною котушкою показано на рис. 5

|
| Рисунок 5.9 Слідкуюча система на двох трансформаторних перетворювачах з поворотною котушкою |
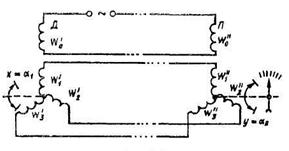
Слідкуючі системи з диференціальними трансформаторними перетворювачами соленоїдного типу зображено на рис. 5.10. Вторинні котушки трансформаторного перетворювача з'єднані між собою узгоджено.
Переміщення якоря від середнього положення порушить рівність вторинних напруг  і
і  . Різниця потенціалів підсилюється підсилювачем 1 і подаєтьсяна серводвигун, який, переміщує повзунок реостата R компенсуючи різницю напруг і , одночасно повертаючи стрілку показуючого приладу.
. Різниця потенціалів підсилюється підсилювачем 1 і подаєтьсяна серводвигун, який, переміщує повзунок реостата R компенсуючи різницю напруг і , одночасно повертаючи стрілку показуючого приладу.
У слідкуючій системі, що приведена на рис. 5.11, використовуються два диференціальних трансформаторних перетворювачісоленоїдного типу, вторинні котушки яких з’єднані між собою зустрічно. Різниця напруг  ,
,  ,
,  ,
,  підсилюється підсилювачем 1 і подаєтьсяна серводвигун, який, повертаючи кулачок, переміщує сердечник вторинного перетворювача, компенсуючи розбіжність між напругами , , , а також одночасно повертає стрілку показуючого приладу.
підсилюється підсилювачем 1 і подаєтьсяна серводвигун, який, повертаючи кулачок, переміщує сердечник вторинного перетворювача, компенсуючи розбіжність між напругами , , , а також одночасно повертає стрілку показуючого приладу.
| 
|
| Рисунок 5.10 Слідкуюча система на трансформаторних соленоїдних перетворю-чах, при узгодженому з’єднані обмоток. | Рисунок 5.11 Слідкуюча система на трансформаторних соленоїдних перетворю-чах, при зустрічно з’єднаних обмотках. |
| <== попередня сторінка | | | наступна сторінка ==> |
| Вторинні перетворювачі вимірювальної інформації | | | Вихідні пристрої систем автоматизованого вимірювання і контролю |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |