- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Геодезичний чотирикутник
Координати вихідних пунктів Ф, Е (рис. 11.1) приведені в табл. 11.1. Горизонтальні кути виміряні рівно точно. Їх величини приведені в табл. 11.2.
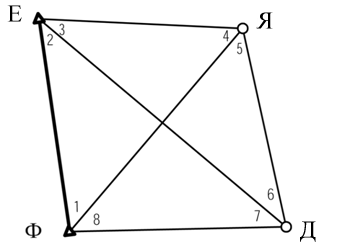
Рис. 11.1 – Геодезичний чотирикутник
Визначаємо кількість надлишкових вимірів

де  – кількість всіх вимірів;
– кількість всіх вимірів;  – кількість невідомих.
– кількість невідомих.
Складаємо умовні рівняння. На перший погляд може здатися, що в цій системі – п’ять геометричних умов фігур: трикутники ФЕЯ, ФЯД, ФЕД, ДЕЯ і чотирикутник ФЕЯД. Насправді незалежними тут будуть лише три умови, інші – лінійні комбінації перших трьох.
Таблиця 11.1 – Координати вихідних і шуканих пунктів
| Найменування пунктів | Координати | |
| X | Y | |
| Ф | 600449,146 | 7239628,382 |
| Е | 6002815,386 | 7239915,593 |
| Я | 6002847,421 | 7243135,237 |
| Д | 600141,020 | 7243569,854 |
Таблиця 11.2 – Виміряні і зрівняні кути. Коефіцієнти умовних рівнянь
| № | Виміряні кути | Коефіцієнти умовних рівнянь | Поправки, сек | Зрівняні кути | |||
| a | b | c | d | ||||
| k= | 0,111 | -0,621 | 0,341 | 0,402 | |||
| 48° 42' 42,83'' | 0.878 | -0.16 | 48° 42' 42,67'' | ||||
| 60° 43' 20,49'' | -0.561 | -0.74 | 60° 43' 19,75'' | ||||
| 36° 46' 05,75'' | 1.338 | 0.99 | 36° 46' 06,74'' | ||||
| 33° 47' 50,98'' | -1.494 | -0.15 | 33° 47' 50,83'' | ||||
| 64° 45' 19,35'' | -1 | 0.472 | 0.92 | 64° 45' 20,27'' | |||
| 44° 40' 41,83'' | -1 | -1.011 | 0.33 | 44° 40' 42,16'' | |||
| 31° 43' 42,02'' | -1 | 1.617 | 0.42 | 31° 43' 42,44'' | |||
| 38° 50' 15,86'' | -1 | -1.242 | -0.73 | 38° 50' 15,13'' | |||
| W= | -0,89 | 2,14 | -1,15 | -3,513 | 0,89 | 360° 00' 00,00'' |
На підставі (11.6) замість трьох умов фігур в даному випадку зручно мати одну умову фігури – чотирикутника.
 (11.41)
(11.41)
де  ,
,
і два умовних рівняння сум і різностей
 (11.42)
(11.42)

де  ,
,

Як це видно на схемі мережі (рис. 11.1), застосувавши теорему синусів, будемо мати відношення

де  – істинні значення кутів.
– істинні значення кутів.
На підставі (11.3), застосувавши відношення (11.43), отримаємо ще одне рівняння – умовне рівняння полюса

Таким чином ми маємо чотири умовних рівняння. Три з яких (11.41), (11.42) представлені в лінійному вигляді. Четверте (11.44) необхідно привести до лінійного вигляду.
Як це було викладено в п. 11.1, розкладемо (11.44) в ряд Тейлора, обмежимось при цьому першими числами розкладення. Для цього знайдемо часткові похідні за змінними в чисельнику

Помножимо в цьому виразі чисельник і знаменник на  . Після перетворень з урахуванням (11.43) отримаємо
. Після перетворень з урахуванням (11.43) отримаємо

Аналогічно

Переходимо до знаменника

Аналогічно

Тепер можна записати рівняння (11.44) в лінійному вигляді


де

множник  потрібен для переходу від радіанної міри до кутової.
потрібен для переходу від радіанної міри до кутової.
За формулами (11.41), (11.42), (11.45) визначаємо коефіцієнти умовних рівнянь і заносимо їх до відповідних стовпців табл. 11.2
Обчислюємо вільні члени (нев’язки) W умовних рівнянь, які розміщуємо в нижній частині табл. 11.2, – елементи матриці
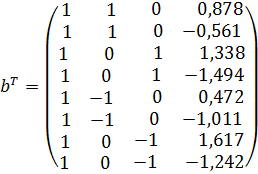 .
.
Транспонуємо матрицю bT

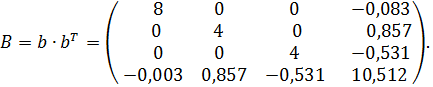
Помножимо зліва матрицю b на матрицю bT . Отримаємо матрицю коефіцієнтів нормальних рівнянь корелат
Визначаємо матрицю B-1, обернену до матриці В
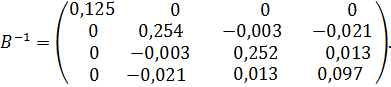
Контроль ВВ-1 = Е.
Обчислюємо за формулою (11.12) корелати

Записуємо їх в табл. 11.2.
Підставляємо корелати в (11.8), знаходимо поправки
Здійснюємо контроль зрівнювальних обчислень за формулою
В результаті маємо

Що не виходить за межі точності обчислень.
Поправки записуємо у відповідний стовпець табл. 11.2 і обчислюємо зрівняні кути.
Якщо підставити зрівняні значення кутів у вирази для обчислення вільних членів формул (11.41), (11.42), (11.45) ми отримаємо нулі.
За формулою (11.29) обчислюємо емпіричну середню квадратичну похибку виміряного кута
За формулою (11.30) оцінюємо її надійність
і за формулою (11.31) знаходимо середню квадратичну похибку зрівняного кута
Використовуючи зрівняні кути за формулами Юнга, обчислюємо координати шуканих пунктів (табл. 11.3).
Таблиця 11.3 – Обчислення|підрахунок| координат шуканих пунктів
| Найменування пунктів | Виміряні|виміряти| кути|роги| | Координати | |

| 
| ||
| Е | 60° 43' 19,75'' | 602815,386 | 7239915,593 |
| Ф | 87° 32' 57,80'' | 600449,146 | 7239628,382 |
| Д | 31° 43' 42,45'' | 600141,021 | 7243569,854 |
| Е | 602815,386 | 7239915,593 |
| Продовження таблиці 11.3 | |||
| Е | 97° 29' 26,49'' | 602815,386 | 7239915,593 |
| Ф | 48° 42' 42,67'' | 600449,146 | 7239628,382 |
| Я | 33° 47' 50,84'' | 602847,421 | 7243135,237 |
| Е | 602815,386 | 7239915,593 |
Тепер необхідно виконати оцінку точності, тобто визначити сукупну середню квадратичну похибку положення шуканих пунктів відносно вихідних. Для спрощення задачі приймемо пункт Ф за начало умовної системи координат, а ось Х спрямуємо вздовж лінії ФЕ.
Координати шуканих пунктів в цій системі відповідно дорівнювати




де 
Тепер на підставі (11.24) необхідно знайти елементи матриці FT – часткові похідні координат шуканих пунктів за виміряними кутами. Їх значення в приведені в табл. 11.4
За формулами, приведеними в табл. 11.4, обчислюємо елементи матриці FT
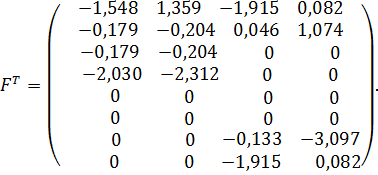
Транспонуємо матрицю FT

Таблиця 11.4 – Часткові похідні координат шуканих пунктів
за виміряними кутами
| ∂XЯ | ∂YЯ | ∂XД | ∂YД | |

| 
| 
| 
| |
| 
| 
| 
| |
|
|
| __________ | __________ | |

| 
| __________ | __________ | |
| __________ | __________ | __________ | __________ | |
| __________ | __________ | __________ | __________ | |
| __________ | __________ | 
| 
| |
| __________ | __________ |
|
|
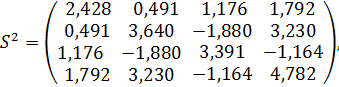
Підставимо матриці F, FT, b, bT, B-1 у вираз (11.26), отримаємо матрицю S2, помноживши яку на квадрат емпіричної середньої квадратичної похибки m, знайдемо на підставі (11.25) сукупну похибку положення шуканих пунктів.
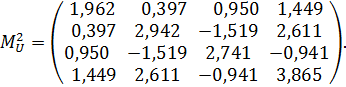
За елементами матриць  визначаємо:
визначаємо:
1. Із виразу (10.22) – середні квадратичні похибки шуканих пунктів за осями координат
пункт Я пункт Д


2. За формулою (10.24) – кутові середні квадратичні похибки

3. Замінивши у виразах (2.26) і (2.27)  на
на  – елементи еліпсів похибок положення шуканих пунктів
– елементи еліпсів похибок положення шуканих пунктів
пункт Я пункт Д









За обчисленими параметрами будуємо еліпси похибок на схемі мережі.
| <== попередня сторінка | | | наступна сторінка ==> |
| Застосування метода тріангуляції для зрівнювання виміряних величин, пов’язаних умовами | | | Центральна система |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |