- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Основні теоретичні відомості
1й етап. Припустимо, що рівняння реальної системи має вид
 , (17.1)
, (17.1)
 . (17.2)
. (17.2)
Через  позначається шум, який збуджує стан, а через
позначається шум, який збуджує стан, а через  - шум спостережень чи вимірювань.
- шум спостережень чи вимірювань.
Таким чином, на першому етапі нам необхідно задати матриці  системи в просторі станів, а також матриці коваріацій шумів стану та вимірювань.
системи в просторі станів, а також матриці коваріацій шумів стану та вимірювань.
Розглянемо випадок синтезу оптимального стохастичного спостерігача для літального апарата. Стан системи збурюється турбулентністю атмосфери, яка є кольоровим шумом. Стандартна задача синтезу оптимального стохастичного спостерігача припускає, що на систему діє білий шум. Для приведення поставленої задачі до стандартного виду необхідно включить формуючий фільтр (фільтр, на вхід якого поступає білий шум  , а на виході маємо кольоровий шум
, а на виході маємо кольоровий шум  , спектральні щільності якого описують турбулентність атмосфери) в структуру об’єкта, тобто розширити об’єкт. Тобто. для синтезу ми будемо використовувати об’єкт з розширеним простором стану, що описується матрицями
, спектральні щільності якого описують турбулентність атмосфери) в структуру об’єкта, тобто розширити об’єкт. Тобто. для синтезу ми будемо використовувати об’єкт з розширеним простором стану, що описується матрицями  .
.
2й етап. Допустимо, то спостерігач повного порядку виду

відповідає системі, що описується рівняннями (17.1), (17.2).
Тоді помилка відновлення визначається виразом
 . (17.3)
. (17.3)
Задача оптимального вибору величини  називається задачею оптимального спостереження (задачею побудови оптимального спостерігача), тобто нам необхідно вибрати такі коефіцієнти спостерігача, щоб мінімізувати вираз (17.3).
називається задачею оптимального спостереження (задачею побудови оптимального спостерігача), тобто нам необхідно вибрати такі коефіцієнти спостерігача, щоб мінімізувати вираз (17.3).
Матрицю можна отримати, вирішивши алгебраїчне рівняння Ріккаті для спостерігача
 ,
,
де  - рішення рівняння Ріккаті;
- рішення рівняння Ріккаті;  ,
,  - інтенсивності білого шуму.
- інтенсивності білого шуму.
Тоді матриця коефіцієнтів підсилення оптимального спостерігача буде дорівнювати
 .
.
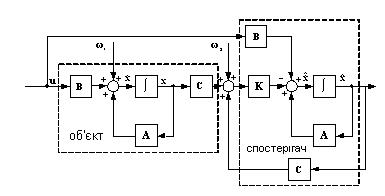 Рис.17.1. Схема з’єднання об’єкта із оптимальним стохастичним спостерігачем
Рис.17.1. Схема з’єднання об’єкта із оптимальним стохастичним спостерігачем
Таким чином, на другому етапі ми здійснюємо синтез фільтра Калмана.
В результаті синтезу отримаємо спостерігач, що описується четвіркою матриць в просторі стану, на виходе якого маємо відновлений вектор стану системи.
Схема з’єднання об’єкта із спостерігачем представлена на рис.17.1.
В пакеті програм MATLAB можна вирішити задачу побудови оптимального стохастичного спостерігача, виконавши даний алгоритм.
1. В просторі стану задати четвірку матриць об’єкта.
A = [-0.0233 0 -0.0836 -11.4652 0
0 0 1.0000 0 0
0.0117 0 -1.0718 262.2255 23.5098
0 0 0 0 1.0000
0.0005 0 0.0498 -12.2545 -2.3717]
B = [ 4.6164 0.0216
0 0
0.4589 0.2907
0 0
0.0012 -0.0365 ]
C = [ 1 0 0 0 0
0 1 0 0 0
0 0 1 0 0
0 0 0 1 0
0 0 0 0 1 ];
D = [ 0 0
0 0
0 0
0 0
0 0 ];
2. В реальних системах виміряти стан точно не можна через шуми вимірювань, крім того на систему завжди діє збурення. Задамо матрицю збурень G і створимо модель збуреного об’єкта в просторі стану.
W=[1 0 0.1 0.9 0.9]; W=diag(W);
G=[W*A(:,1) W*A(:,3)];
sys=ss(A,[B G],C,[D zeros(5,2)]);
3. Стан системи, на яку діють збурення можна відновити за допомогою оптимального стохастичного спостерігача (фільтра Калмана). Для цього необхідно задати матрицю коваріацій шумів вимірювань Qn та матрицю коваріацій шумів сстану Rn. Задачу синтезу в MATLAB вирішуємо за допомогою оператора kalman.
Qn=0.1*eye(2); Rn=0.01*eye(5);
[Kest,L,P]=kalman(sys,Qn,Rn)
4. Коли стан системи відновлено, можна приміняти закони синтезу оптимального детермінованого регулятора.
V=[1.5, 1.5 ,2.298 ,0.8 ,0.5];
Q=diag(V);
V1=[1,1.17];
R=diag(V1);
N=zeros(5,2);
N(3,2)=-0.624;
[K,S,E]= lqr(A-L*C,B,Q,R,N)
5. Для отримання характеристик системи записуємо матриці стану замкненої системи. За допомогою операторів impulse та step будуємо імпульсну та перехідну характеристики замкненої системи.
figure(1)
impulse(A-L*C-B*K,B,C,D)
figure(2)
step(A-L*C-B*K,B,C,D)
6. Якість синтезованої системи оцінюємо за допомогою
 норми.
норми.
Ac=A-L*C-B*K;
normh2(Ac,B,C,D)
| <== попередня сторінка | | | наступна сторінка ==> |
| Лабораторна робота 17 | | | Завдання |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |