- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Автомат Мура
Залежність вихідного сигналу лише від стану представлена в автоматах типа Мура (англ. Moore machine). У автоматі Мура функція виходів визначає значення вихідного символу лише по одному аргументу - стану автомата. Цю функцію називають також функцією міток, оскільки вона кожному стану автомата ставить мітку на виході.
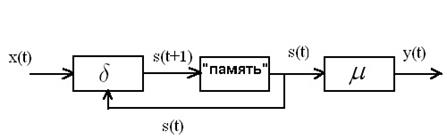
Функціональна схема автомата Мура.
Кінцевим детермінованим автоматом типа Мура називається сукупність п'яти об'єктів:

де S, X, Y і  - відповідають визначенню автомата типа Мілі, а
- відповідають визначенню автомата типа Мілі, а  є відображенням вигляду: : S®Y
є відображенням вигляду: : S®Y

із залежністю станів і вихідних сигналів в часі рівнянням:
Особливістю автомата Мура є те, що символ y(t) у вихідному каналі існує весь час доки автомат знаходиться в змозі s(t).
Для будь-якого автомата Мура існує автомат Мілі, що реалізовує тугіше саму функцію. І навпаки: для будь-якого автомата Милі існує відповідний автомат Мура.
Отже,
Автомат Милі - а(t+1)= в (а, z(t)); w(t)= л (а, z(t)); а(0)= a1, t= 0,1,2...
Автомат Мура - а(t+1)= в (а, z(t)); w(t)= л (а(t)); а(0)= a1, t= 0,1,2... Ці автомати С-автомат: під абстрактним з-автоматом розуміють математичну модель цифрового пристрою, визначувану восьмикомпонентним вектором S = {A,z,w,u,у,л1, л2,a1}, де А- безліч станів, Z- вхідний алфавіт, W- вихідний алфавіт автомата Милі, U- вихідний алфавіт автомата Мура, у- функція переходів автомата, л1- функція виходів автомата Милі, л2- функція виходів автомата Мура, а1 - початковий стан. а(t+1)= в (а, z(t)); w(t)= л 1(а, z(t)); u(t)= л (а(t)); а(0)= a1, t= 0,1,2...
Відмінність С-автомата в тому, що він одночасно реалізує дві функції виходів л1 і л2, кожна з яких характерна для моделі Мілі і моделі Мура окремо. Від С-автомата легко перейти до автоматів Мілі і Мура з врахуванням можливих зрушень вихідних сигналів на такт, аналогічно тому, як можливий перехід від автомата Мілі до автомата Мура і навпаки.
Cпосіб визначення вихідного сигналу. У автоматі Мілі функція л визначає вихідний сигнал залежно від стану автомата і вхідного сигналу у момент часу t, а в автоматі Мура накладаються обмеження на функцію л, що полягають в тому, що вихідний сигнал залежить лише від стану автомата і не залежить від значення вхідних сигналів. Вихідні сигнали ЦА Мура відстають на один такт від вихідних сигналів ЦА Мілі, еквівалентного йому.
| <== попередня сторінка | | | наступна сторінка ==> |
| Автомат Мілі | | |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |