РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Fig.5 The three elements needed for successful control design
Control theory applies to everyday situations, as in the examples given above, just as well as it applies to the more exotic task of maneuvering space vehicles. In fact, the concepts of control theory are simple and application-independent. The universality of control theory means that it is best considered as applied to an abstract situation that contains only the topological core possessed by all situations that need to be controlled. Such an abstract situation is called a system.
The argument is that if we know how to control a highly general situation called a system then we shall be able to control any and every particular situation. This is the viewpoint of control theory and it is this viewpoint that gives it its extraordinary power.
Thus any situation, delineated from its environment for study, is called a system. When control theory wishes to study temperature regulation in the human body, it concerns itself with a system involving blood circulation, heat generation and heat loss mechanisms and decision-making by the brain. Systems can usefully be defined in almost any discipline they are not confined to science or engineering.
Control theory concerns itself with means by which to alter the future behaviour of systems. For control theory to be successfully applied, there needs to be available:
(1) A purpose or objective that is an operational blocked with the future state of the system. (Clearly the past cannot be influenced nor, since no response can take place in any system in zero time, can the present.)
The objective of any control system in every case is connected with the performance of the system over some period of time – the accountant and the industrial manager want to see long periods of smooth and profitable operation. Sometimes this leads to conflicting requirements, in the sense that short term objectives are frequently in direct opposition to long term objectives. In general terms this objective can be considered to be the desired behaviour of the system.
(2) A set of possible actions that offers an element of choice. (If no variation of actions is possible, control cannot be exercised and the system will follow a course that cannot be modified.)
(3) (Unless a trial and error strategy is to be adopted) some means of choosing the correct actions (ii) that will result in the desired behaviour (i) being produced.
In general terms, this requirement is met by a model capable of predicting the effect of control actions on the system state. Such a model may be implicit and not even recognized as a model or it may consist of a large and complex set of equations.
For the accountant, the model is a balance sheet together with inherited wisdom. For the military commander, the model is a map of local terrain and a knowledge of the types and deployments of men and equipment. For the control of quantities that can be measured by sensors, mathematical models in the form of stored curves or sets of equations will usually be used.
We see then that to achieve successful control we must have a defined objective and be able to predict adequately, over some sufficient time scale, all the outcomes of all the actions that are open to us. For instance, a national power station building program can only be planned once predictions of the future demand for electricity are available. Figure 5 summarizes the three requirements needed for successful control.
A major problem in control using a long term horizon is uncertainty of the long term accuracy of models, compounded by the likelihood of unforeseen events. That is to say, the possibility must be faced that, once uncertainty rises above a particular level, no meaningful control can be implemented and that policies that look ahead to anticipate future contingencies may call for immediate sacrifices that will never be repaid by the creation of more favourable future environments.
Feedback control, in which an error initiates corrective action, can be used only where corrective actions take effect relatively quickly. It is clearly unsatisfactory to wait until electricity demand exceeds the maximum possible supply level before starting to build a new power station. On the other hand, it is usually perfectly feasible to control the speed of a motor by an error-driven feedback correction.
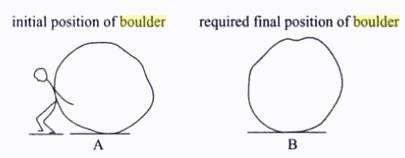
None of the processes that we are called upon to control can be made to change its state instantaneously. This is because all processes have the equivalent of inertia. Suppose that we have the task of moving a large spherical boulder from A to B by brute force (Figure 6).
Переглядів: 288