РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Перетворювачами температури
Терморезистивними
З
Кола
Вимірювальні
Перетворювачів
Тема 5. Термометрія за допомогою тензорезистивних
Змістовний модуль 2. Вимірювання температури
Загальнівідомості
Температурою називають фізичну величину, яка
характеризує ступінь нагрітості тіла.
Практично всі технологічні процеси і ряд властивостей тіл
залежать від температури. Вимірювати температуру можна
лише непрямим шляхом, грунтуючись на залежності від
температури таких фізичних властивостей тіл, які можливо
безпосередньо виміряти. Ці властивості тіл називаються
термометричними. До них відносяться: довжина, об’єм, термо-
ЕРС, електричний опір тощо. В свою чергу речовини, які
характеризуються
термометричними
властивостями,
називаються також термометричними. Технічні засоби для
вимірювання температури мають назву термометри.
Для створення термометра, необхідно мати температурну
шкалу. Найбільш розповсюдженими шкалами є шкали
Фаренгейта, Ремюра, Цельсія і Кельвіна.
Результати вимірювання температури за цими шкалами
записуються як:
| t F | ;0t R;0t C;0t K |
Для перерахунку з однієї шкали в іншу використовують
наступні співвідношення:
t C
=
1.25 R
= ( ) (0
t F
−
)
T
273.15
K
Межі вимірювання температур, найбільш уживаними типами
термометрів, наступні.
Термоелектричні термометри: від 2000C до 22000C .
Терморезистивні термометри:
- на основі металевих терморезистивних перетворювачів від
2600C до 11000C ;
- на
основі
напівпровідникових
терморезистивних
перетворювачів від
−2400C до 3000C .
Манометричні термометри (газові і рідинні) від
6000C .
−1500C до
Найбільш розповсюдженими для промислового вимірювання
температури в межах від −260 до
11000C є платинові
терморезистивні перетворювачі температури, так звані
термометри опору (ТО).
Позитивною стороною їх є висока точність і часова
стабільність, недоліком – нелінійність функції перетворення,
особливо в діапазоні низьких температур (
суттєво падає чутливість.
−260...00C ), в якому
При високих температурах (понад 10000C ) на стабільність
ТО впливає випаровування платини, що обмежує їх
застосування.
ТО з міді, нікелю та інших металів мають меншу часову
стабільність, що зумовлює їх нижчий клас точності.
При вимірюванні низьких і середніх температур
використовуються ТО з високим номінальним опором (від 100
до 500 Ом), а при вимірюванні високих температур – низькоомні
ТО з номінальним опором від 10 до 1 Ом.
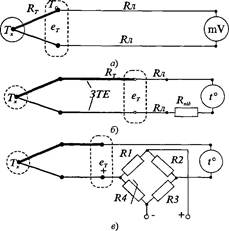
Увімкнення ТО у вимірювальне коло з допомогою
з’єднувальних провідників Rл (рис. 5.1) впливає на точність
вимірювання. Існують дво-, три- та чотирипровідні схеми
увімкнення ТО у вимірювальне коло.
Для зменшення похибок, що з’являються через
невідповідність опору Rл з’єднувальних провідників їхньому
градуювальному
значенню,
використовують
термоперетворювачі з трьома і чотирма відводами і відповідне
їх увімкнення у мостове або компенсаційне коло. Необхідно
також враховувати можливість додаткових похибок, які















































 виникають від нагрівання ТО вимірювальним струмом. Для
виникають від нагрівання ТО вимірювальним струмом. Для
цього необхідно, щоб вимірювальний струм був таким, щоб
викликана ним зміна опору не перевищувала 0,1%.
В практиці технологічних вимірювань температури з
використанням терморезистивних перетворювачів, широкого
застосування набули , зокрема, мостові кола (зрівноваженіі
незрівноваженімости).
Зрівноважені мости поділяються на неавтоматичні та
автоматичні. В них використовується нульовий метод
вимірювання.
З допомогою не автоматичних мостів вимірюють опори
терморезисторів в межах від 0,5 до 10 7Ом, зокрема проводять
градуювання термоперетворювачів опору і вимірюють
температуру.
Двопровіднусхемузрівноваженогонеавтоматичногомосту
наведено на рис.5.1.
a
Rt
Rл
c
R1
I
t
I
I12
HI
I3
R2
IHI
d
+
E
−
Rл
b
R3
Рис. 5.1. Двопровідна схема зрівноваженого не автоматичного моста
R1і R2 - постійні резистори; R3 - змінний резистор; Rt -
вимірювальний опір; Rл -опір з’єднувальних провідників
В діагональ живлення ab мосту увімкнено джерело струму,
а у вимірювальну діагональ cd відповідно нуль-індикатор (НІ),
зокрема нуль-гальванометр. Між точками підключення,
різнойменних діагоналей знаходяться плечі моста, які
складаються з постійних резисторів R1і R2та змінного

 резистора R3, а в плече cd увімкнено вимірювальний опір Rtі
резистора R3, а в плече cd увімкнено вимірювальний опір Rtі
два з’єднувальних провідника опором Rл.
Якщо міст зрівноважений то струм IHIв діагоналі cd
дорівнює нулю, а струм I2= I3та I1= It. Як наслідок, маємо
( )
−I R22=I R1 1і I R3 3= I Rtt+2Rл.Розділивши два останніх
рівняння одне на друге з урахуванням рівності відповідних
струмів маємо:
( )
R R2t+2Rл=R R1 3, (5.1)
Звідки Rtдорівнюватиме:
R
=
R
1 R
−
2R . (5.2)
t
R2
л
З (5.2) випливає, що Rtможна знайти по значенню R3при
постійному співвідношенні плеч R R12 та при незмінному
значенні Rл.
В той же час Rл змінюється зі зміною температури
зовнішнього середовища, що призводить до зменшення точності
результату вимірювань Rtі в тим більшій ступені, чим менше
значення Rt.
Цейнедолікможебутиусуненошляхомтрипровідного
з’єднаннятерморезистивногоперетворювачазмостом (рис. 5.2).
При такому з’єднанні, діагональ живлення мосту доводиться
(точка b ) до терморезистивного перетворювача. В результаті
цього з’єднувальні провідники виявляються в двох різних
плечах мосту. Один із опорів Rл -в плечі мосту разом з опором
R3, а другий Rл -в плечі разом з Rt.
Тоді умова рівноваги мосту запишеться:
( ) = R R(t+ Rл). (5.3)
R R13+Rл 2
Звідки Rtвизначиться як:



































R
t
=
R
R2
(
)
R3+ Rл − Rл . (5.4)
Rл
Rt
c
R1
b
Rл
a
HI
R2
R3
d
+
E
−
Рис. 5.2. Трипровідна схема з’єднання терморезистивного перетворювача
з не автоматичним мостом
Оскільки конструктивно приймається, що R1= R2, то з (5.4)
Rt= R3. Іншими словами результат вимірювання в цьому
випадку не залежить від опору з’єднувальних провідників Rл.
Трипровіднусхемуавтоматичногозрівноваженогомостудля
вимірюваннятемператури наведено на рис. 5.3.
Рис. 5.3. Трипровідна схема автоматичного зрівноваженого мосту для
вимірювання температури: R1; R2; R3 - опори резисторів, увімкнених у
 відповідні плечі; Rp - опір реохорда; ∆Rp - зміна опору реохорда; Rл1;
відповідні плечі; Rp - опір реохорда; ∆Rp - зміна опору реохорда; Rл1;
Rл2;Rл3 -опори з’єднувальних провідників; ЕП - електричний
підсилювач; РД - реверсивний двигун; RT - опір терморезистора; RШ -
опір шунта; U - напруга живлення.
На схемі терморезистор RT (рис. 5.3) вмикається у плече
вимірювальної мостової схеми, що прилягає до реохорда Rp,
який виконує вимірювальну функцію. При такому увімкненні,
рівняння рівноваги при початковому (5.5) і деякому проміжному
значенні вимірювальної температури (5.6) без урахування опорів
ліній і при відсутності шунтуючого опору RШ,який служить
для розширення границь вимірювання, має вигляд
( RT0+R Rp)2= R R13 , (5.5)
де RT0 -опір терморезистора при температурі T0у вихідному
стані
+ ∆ + (
− ∆
) =
(
+ ∆R ) (5.6)
R R2T 0
RT
Rp
Rp
R R
1 3
p
Розкриваючи дужки в (5.6) і виконавши відповідні
перетворення, з урахуванням (5.5), отримаємо, що
∆R = ∆
R
R
. (5.7)
p
T
R1+ R2
Із (5.7) випливає, що зміна опору реохорда
∆RTв такому
вимірювальному колі буде пропорційною зміні опору
∆RT
перетворювача, що викликане зміною вимірювальної
температури.
Для зменшення впливу опорів ліній в схемі
використовується трипровідне ввімкнення ТО; опір окремих
з’єднувальних проводів вмикається відповідно в сусідні плечі
моста і діагональ живлення. При такому ввімкненні для деякого
значення RTC, при якому міст буде симетричним, вплив
R
=
= R і їх зміни будуть повністю
однакових опорів лінії л1
Rл3
л

 вилучені. Справді, для симетричного моста, коли R3+ ∆Rp= R2з
вилучені. Справді, для симетричного моста, коли R3+ ∆Rp= R2з
умови рівності моста
( − ∆ ) + = ( + ∆R ) ( R + R )
RTC+RpRpR Rл 2R3 p 1 л (5.8)
отримаємо
R + R
− ∆R
R + ∆R
TC p
R1+ Rл
p+Rл=
R2
p=1, (5.9)
тобто в чисельнику і знаменнику лівої частини останнього
виразу опори Rл додаються до опорів ( R + R )
TC p − ∆Rp, що за
значенням дорівнюють опору R1. А це не порушує умови
рівноваги.
Принцип дії данного вимірювального мосту полягає у
наступному. При зміні температури відносно початкового
значення T0коли міст зрівноважений до деякого значення Tc,
зміниться опір терморезистора до відповідного значення RTC,
що викличе розбаланс мостової схеми. У зв’язку з цим, у
вимірювальній діагоналі, куди увімкнено підсилювач ЕП,
з’явиться напруга розбалансу мосту. Данна напруга
підсилюється підсилювачем ЕП до величини, необхідної для
того, щоб ротор реверсивного двигуна РД почав обертатись у
відповідну сторону в залежності від знака розбалансу.
Вал РД, будучи зв’язаним через редуктор з движком
реохорда, переміщуватиме його доти, поки напруга розбалансу
не дорівнюватиме нулю. Одночасно з цим переміщується
стрілка (показчик) відносно шкали, проградуйованої в0C , яка і
вкаже на величину вимірювальної температури.
Незрівноваженімости (рис. 5.4) застосовуються в пристроях
вимірювання температури рідше ніж зрівноважені. До недоліків
незрівноважених мостів належить нелінійність їх функції
перетворення та залежність вихідної напруги від напруги
джерела живлення. Проте через їх виняткову простоту при
наявності стабілізованих джерел напруги незрівноважені мости
використовуються для вимірювання температури у вузькому
температурному діапазоні, коли нелінійністю функції



 перетворення незрівноваженого моста можна знехтувати або
перетворення незрівноваженого моста можна знехтувати або
зробити вихідний прилад з нелінійною шкалою.
Для мостового кола, зображеного на рис. 5.4, вихідна
напруга Uвих визначиться як
( + ∆R ) U R( + R )
U R
U
вих
=
TO
+ ∆ +
T
−
+
л1
. (5.10)
R
TO
RTR3+ Rл
3R1
Rл
1+R2
Як видно з наведеного виразу, опори ліній Rл1 та Rл4 на
результат вимірювань не впливають. Опори ліній Rл1 та Rл2
додаються не до опору терморезистора RT, а до опорів плеч
моста, значення яких можна вибрати значно бідьшими за опори
лінії. За цих умов значення вихідної напруги з достатньою
точністю дорівнюватиме
( R + ∆ )
R R − R R
U
= U
TO
T
2 1 3
. (5.11)
вих
(
R
+ ∆ +
R R
)(
)
TO
T
3R1+R2
Рис. 5.4. Схема незрівноваженого мосту для вимірювань температури
Якщо міст зрівноважений при початковому значенні опору
RTO, тобто коли
R RTO2=R R1 3, то для будь-якого іншого
значення опору термоперетворювача в границях діапазону
вимірювань буде



=
R R
U
вих
U
(
R
)(
R
T
+ ∆ +
R R
)
. (5.12)
1+R2
TO
T
Якщо
∆RT<< ( R
TO
+
R3)
вихідна напруга в першому
наближенні буде пропорційна зміні опору ∆RT, а нелінійність
функції перетворення моста досягне значення
⋅
∆RT100%
RTO+ R3
. (5.13)
Зокрема для мідного термометра опору (
á =T0,0043 10C )
при R3= RTOнелінійність в діапазоні (t ± 5)0C дорівнюватиме
приблизно 1%.
При точних вимірюваннях високих температур з
використанням низькоомних терморезистивних перетворювачів,
а також при вимірюванні низьких температур в кріогенній
техніці, коли опір термоперетворювача співвимірний з опором
з’єднувальних провідників, зменшення впливу опору
з’єднувальних провідників набуває особливого значення. Для
таких вимірювань здебільшого застосовують компенсатор
змінного струму (рис. 5.5).
Рис. 5.5. Схема автоматичного компенсатора для вимірювань температури





 Термоперетворювач RTживиться від джерела змінної
Термоперетворювач RTживиться від джерела змінної
напруги, яке створює в колі термоперетворювача струм I1.
Компенсаційне коло живиться від вторинної обмотки
вимірювального трансформатора струму, первинна обмотка
якого увімкнена в коло послідовно з термоперетворювачем.
Значення компенсуючої напруги
UK= I R
+ ∆R
R
ш
=
I
1 R
+ ∆R
R
ш
, (5.14)
2
П
p
П
p
R + R
ш p
kI
Rш+Rp
де
kI
- коефіцієнт трансформації вимірювального
трансформатора струму (kI= I I12).
Вибравши для встановлення початку шкали опір RП так, щоб
для початкового значення опору RTпоч було:
I
I R
= I R
=
1R
. (5.15)
Tпоч
П
kI
П
Для інших значень RTв заданому діапазоні вимірювань
отримаємо
(
I R
)I1 R + ∆
+ ∆RT= R
R
ш
, (5.16)
звідки
Tпоч
k
I
П
(
p
R
ш+Rp
)
∆Rp= ∆
RT
k R + R
I ш p
Rш
. (5.17)
Тобто зміна опору реохорда є лінійною функцією зміни
опору термоперетворювача.
( )
Оскільки вимірювана UT= I R1Tпоч + ∆RTі компенсувальна
U
K
=
I
1 RП + ∆R
p
R
ш
kI
Rш+Rp
напруги створюються від одного джерела, то зміна напруги
живлення (і струму I1) практично не впливає на результат
вимірювання. Усувається також вплив опору лінії - два проводи
 знаходяться в колі джерела живлення, а по двох інших, які
знаходяться в колі джерела живлення, а по двох інших, які
розміщені в компенсаційному колі, в момент компенсації (коли
U 0 ) струм не проходить і на них не створюється додатковий
спад напруги.
Цифровітермометри
Задачі контролю температури з точки зору збору і аналізу
даних про об’єкт найбільш ефективно можна вирішувати з
допомогою електронних приладів. Їм характерним є широкий
діапазон вимірювання температури, максимально швидке
отримання інформації в зручному для сприйняття вигляді,
можливість інтегрування з будь-яким типом електронних
систем.
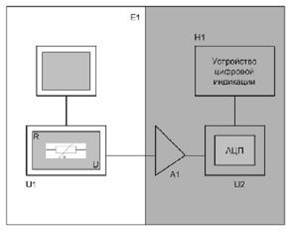
В загальному випадку цифровий термометр складається з
теплового чутливого елемента (наприклад терморезистора);
АЦП, призначеного для перетворення аналогового сигналу від
терморезистора в цифровий сигнал; дисплея; засобів введення-
виведення сигналів для взаємодії з іншими пристроями;
елемента живлення.
Структурну схему цифрового термометра наведено на рис.
5.6.
Рис. 5.6. Структурна схема цифрового термометра з терморезистивним
перетворювачем
В таких термометрах зміна температури об’єкта в якому
розміщено терморезистор викликає зміну його опору, яка в
блоці
E1перетворюється у відповідну зміну напруги.
Перетворювач U1живиться від стабілізатора струму G1.
Вихідний сигнал блока E1підсилюється підсилювачем A1і
надходить до аналогово-цифрового перетворювача (АЦП) U2,
на виході якого знаходиться цифровий блок індикації H1, який
призначений для висвічування температури контрольованого
об’єкта.
 Тема 6. Термометрія за допомогою термоелектричних
Тема 6. Термометрія за допомогою термоелектричних
Читайте також:
- Алгоритм розрахунку температури поверхні чипу ІМС процесора
- Вертикальний градієнт температури
- Визначення температури на поверхні ізоляції принадземномупрокладанні та при прокладанні трубопроводів в приміщенні.
- Вимірювання температури
- Вимірювання температури контактним методом.
- Вплив всесторонннього стиску і температури на механічні властивості гірських порід
- Вплив температури на рівновагу
- Вплив температури на форму та розмір наночастинок
- Добовий та річний хід температури грунту
- Загальні відомості про вимірювання температури
- Закон Планка. Інтенсивність випромінювання чорного тіла й будь-якого реального тіла залежить від термодинамічної температури й довжини хвилі.
- Залежність опору від температури.
Переглядів: 1469
| <== попередня сторінка | | | наступна сторінка ==> |
| Розпорошена вимірювальна система та її канали зв’язку | | | Перетворювачів |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |