РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Будова|споруди| |і/або|і принци|основа|п дії.
Контрольні питання
Контрольні питання
1. З якого моменту переходить право власності на будинок (квартиру)?
2. За яких правових підстав може виникати спільна власність на будинок?
3. Чи має право Віктюк претендувати на житло. Якщо так, то в якій частці?
Задача № 10. У червні 1998 р. громадянка Семенець в інтересах своїх неповнолітніх дітей звернулася до суду з позовом до громадянина Матусевича про виділення частки зі спільного майна. Позивачка
зазначала, що її дітям належить по 1/2 будинку, відповідачеві — друга половина. Оскільки Матусевич має за правом власності в тому ж селі інший будинок, в якому мешкає, а вона та її діти житла не мають, позивачка просить виділити їй та її дітям весь будинок і зобов’язується сплатити відповідачеві грошову компенсацію за їхню частку.
1. В якому порядку визначається розмір грошової компенсації за частину в спільній власності?
2. Що розуміється під дійсною вартістю будинку?
3. Яке рішення повинен прийняти суд?
 Будова програмованого пристрою керування PLC подібна до будови комп'ютера. Він складається з блоку живлення, модуля вхідних сигналів, центрального модуля з мікропроцесором, пам'яті програми, а також з модуля вихідних сигналів. На відміну від систем з фіксованою програмою, в яких послідовність керування визначена використаними елементами і їх взаємодією, в програмованих пристроях ця послідовність керування записана в пам'яті згада
Будова програмованого пристрою керування PLC подібна до будови комп'ютера. Він складається з блоку живлення, модуля вхідних сигналів, центрального модуля з мікропроцесором, пам'яті програми, а також з модуля вихідних сигналів. На відміну від систем з фіксованою програмою, в яких послідовність керування визначена використаними елементами і їх взаємодією, в програмованих пристроях ця послідовність керування записана в пам'яті згада них пристроїв у вигляді програми. Програмований пристрій використовується як основна, перетворювальна частина системи керування (рис. 10.1). У системах з незначним ступенем перетворень, який відповідає максимум 100 DI/DO (DI, aнгл. Discrete Input = дискретний вхід, двостановий; DO, aнгл. Discrete Output = дискретний вихід, двостановий) використовують малі, компактні пристрої керування, які називають також мікроконтролерами (рис. 10.2). Коли завдання керування складні, використовують так звані середні (100 - 500 DI/DO) пристрої керування або великі (500 - 3000 DI/DO), побудовані за модульним принципом. Для обслуговування окремих одиниць техніки часто використовують локальні „другорядні" пристрої (Slave), з'єднані за допомогою мережі з «головним» (Master) програмованим пристроєм, наприклад, PROFIBUS-DP. До магістралі (шини) (aнгл. BUS) може бути приєднано багато одиниць (елементів мережі), наприклад, пристрої керування, операторські станції і операторські консолі (панелі). Можуть також бути приєднані інші мережі, наприклад, AS-I, які можуть працювати безпосередньо з вимірювальними і виконавчими механізмами в системі розподіленої обробки даних (рис. 10.3).
них пристроїв у вигляді програми. Програмований пристрій використовується як основна, перетворювальна частина системи керування (рис. 10.1). У системах з незначним ступенем перетворень, який відповідає максимум 100 DI/DO (DI, aнгл. Discrete Input = дискретний вхід, двостановий; DO, aнгл. Discrete Output = дискретний вихід, двостановий) використовують малі, компактні пристрої керування, які називають також мікроконтролерами (рис. 10.2). Коли завдання керування складні, використовують так звані середні (100 - 500 DI/DO) пристрої керування або великі (500 - 3000 DI/DO), побудовані за модульним принципом. Для обслуговування окремих одиниць техніки часто використовують локальні „другорядні" пристрої (Slave), з'єднані за допомогою мережі з «головним» (Master) програмованим пристроєм, наприклад, PROFIBUS-DP. До магістралі (шини) (aнгл. BUS) може бути приєднано багато одиниць (елементів мережі), наприклад, пристрої керування, операторські станції і операторські консолі (панелі). Можуть також бути приєднані інші мережі, наприклад, AS-I, які можуть працювати безпосередньо з вимірювальними і виконавчими механізмами в системі розподіленої обробки даних (рис. 10.3).
Програмований пристрій керування може бути також інтегрований з іншою системою цифрового (мікропроцесорного) керування, наприклад, з комп'ютерним пристроєм цифрового керуванняCNC(ang. Computer Numerical Control). У цьому випадку програмований пристрій активізуватиметься програмою контролера CNC(рис. 10.4). Якщо потрібні тільки окремі функції програмованого пристрою, то найчастіше з операційною системою контролера CNC інтегруються тільки відповідні модулі програмного забезпечення. Все частіше також, поряд з використанням комп'ютерів типу РС1 для програмування пристроїв керування і для складання документації програм, а також з впровадженням апаратних і програмних рішень, застосовуваних в комп'ютерах для систем керування, для реалізації завдань програмованого пристрою керування використовуються промислові комп'ютери (рис. 10.5). У цьому випадку можливим є або використання промислового комп'ютера з програмним забезпеченням PLC, або використання в комп'ютері карт розширень типу PLC.
Програмовані пристрої керування PLC зустрічаються у вигляді: компактному, модульному, об’єднаному з допомогою мережі, інтегрованому з іншими пристроями керування і у вигляді промислового комп'ютера.
 Тепер найчастіше використовуються пристрої керування PLC модульної будови. Центральну групу модулівпристрою керування утворюють блок живлення, модуль центрального процесора CPU, а також принаймні один модуль дискретних входів і один модуль дискретних виходів (рис. 10.6).
Тепер найчастіше використовуються пристрої керування PLC модульної будови. Центральну групу модулівпристрою керування утворюють блок живлення, модуль центрального процесора CPU, а також принаймні один модуль дискретних входів і один модуль дискретних виходів (рис. 10.6).
 Модуль центрального процесора CPU приєднують до джерела напруги, переважно 24 В постійного струму (рис. 10.7).
Модуль центрального процесора CPU приєднують до джерела напруги, переважно 24 В постійного струму (рис. 10.7).
Щоб не втратити даних з пам'яті під час аварії живлення, передбачені батареї або акумулятори.
 Якщо перемикач виду роботи є в позиції СТОП, то використовувані програми пересилаються до CPU. Обмін даними між операторською станцією і модулем CPU забезпечує, як правило, комунікаційний інтерфейс типу MPI. Позиції MRES перемикача модуля відповідає відміна (стирання вмісту) пам'яті CPU; позиції RUN – виконання застосовуваної програми; позиції RUN-Р – виконання з можливістю зміни значень змінних.
Якщо перемикач виду роботи є в позиції СТОП, то використовувані програми пересилаються до CPU. Обмін даними між операторською станцією і модулем CPU забезпечує, як правило, комунікаційний інтерфейс типу MPI. Позиції MRES перемикача модуля відповідає відміна (стирання вмісту) пам'яті CPU; позиції RUN – виконання застосовуваної програми; позиції RUN-Р – виконання з можливістю зміни значень змінних.
Через інтерфейс магістралі PROFIBUS-DP модуль CPU підтримує зв'язок з іншими модулями, які називаються периферійними.
Системні показники інформують про даний стан роботи модуля CPU. При вказівці SF або SF DP з модуля контролера можна отримати точну інформацію про вид допущеної помилки. Центральний модуль - це є мікропроцесор,а також різні види пам'яті - пам'ять даних, робоча і системна,з'єднані між собою шинами пристрою керування.
В пам'яті данихпристрою керування зберігаються дані і інструкції програми користувача (рис. 10.8). Пам’ять типу RAМ або EPROM можна розширити за допомогою додаткових карт або модулів пам'яті. Якщо карта оснащена пам'яттю EPROM, програма користувача може бути завантажена в неї в режимі off-line, що захищає її від втрат під час аварії живлення. Робоча пам'ятьє швидкою, типу RAМ. Дані копіюються до неї в процесі роботи програми користувача. Системна пам'ятьзберігає змінні, які називають також операндами, за якими виконуються операції програми. Змінні ці зібрані в масиви, які називають масивами операндів. Розмір цих масивів залежить від застосованого CPU.
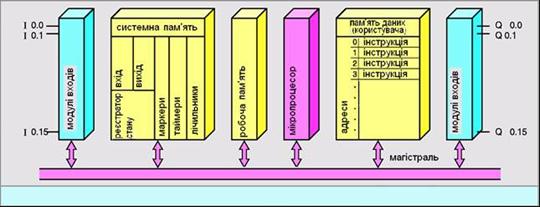
Рис. 10.8. Внутрішня будова пристрою керування PLC
 Операнди CPU:
Операнди CPU:
• вхідні змінні, входи(І, англ. Input) – аргументи програмного перетворення, які надходять від вхідних модулів,
• вихідні змінні, виходи(Q, зангл. quit = вихід) - аргументи, застосовані для повернення результатів програмного перетворення, здійснених модулями виходів,
• змінні-мітки, маркери(М, aнгл. Маркер – людина яка робить відмітки під час гри) - внутрішні змінні, які інформують про стан роботи,
•часові змінні(T, aнгл.Тimer) - генеровані функціональними блоками, використовуються для здійснення часових умов або відмірювання часу
 •чисельні змінні(C, aнгл. Counter) – перетворювані через функціональні блоки, які реалізують програмні операції додавання і віднімання.
•чисельні змінні(C, aнгл. Counter) – перетворювані через функціональні блоки, які реалізують програмні операції додавання і віднімання.
В стані вводу (RUN) програма користувача виконується циклічно (рис. 10.9.). Спочатку з системної пам'яті читається інформація про актуальний стан вхідних змінних.Потім виконується відповідна до програми користувача робота. Результатом виконання програми є новий стан вихідних змінних,які запам'яталися в системній пам'яті і подані на відповідні виходи пристрою керування. По черзі наступає актуалізація стану вхідних змінних, виконання програми, повернення результату і т.д. Час такого одиничного перебігу називають часом циклу.Цей частим більший, чим довша є програма споживача. Він залежить також від швидкості роботи використовуваного CPU. Переважно становить декілька мілісекунд.
Вхідна частина пристрою керуванняподілена на модулі,що маютьпереважно по 8, 16 або 32 двійкові входи (рис. 10.10). Модуль входів містить електронні системи, які змінюють сигнали, що надходять із зовнішніх пристроїв, на логічні сигнали, адаптовані до пристрою керування. Це можуть бути подільники напруги з додатковими фільтрами RC для гасіння завад. Модулі входів постійного струму оснащені додатково діодами для збереження відповідної полярності (найчастіше додатної, яку називають ще „зі спільним плюсом"), а модулі входів змінного струму – мостовими схемами випрямлення. Для ізоляції від високих потенціалів (гальванічної розв’язки) вхідних кіл і магістралі пристрою керування, застосовують оптичні прилади – оптопари (фотодіод як передавач і фототранзистор як приймач в одному елементі, так званий оптоізолятор). Про стан окремих бітів буфера даних вхідного модуля сигналізують світлодіоди типу LED – що дозволяє швидку ідентифікацію стану входів в тракті введення в дію пристрою керування або в процесі пошуку помилок. Мультиплексер (розділювач) керується через декодер адрес.
 Вихідна частина пристрою керуваннятакож поділена на модулі, які мають по 8 або 16 двійкових виходів (рис. 10.11). Модуль виходу складається з системи підсилювачів, наприклад, транзисторна ланка для кіл виходів постійного (напр., 24 В DC, 200 mA) струму або потрійний (трійний) з'єднувач (електронний з'єднувач змінного струму) для безпосереднього керування кіл виходів з індуктивними та ємнісними навантаженнями (напр., 50 Гц, 220 В).
Вихідна частина пристрою керуваннятакож поділена на модулі, які мають по 8 або 16 двійкових виходів (рис. 10.11). Модуль виходу складається з системи підсилювачів, наприклад, транзисторна ланка для кіл виходів постійного (напр., 24 В DC, 200 mA) струму або потрійний (трійний) з'єднувач (електронний з'єднувач змінного струму) для безпосереднього керування кіл виходів з індуктивними та ємнісними навантаженнями (напр., 50 Гц, 220 В).
У випадку завад перетворення програми користувача, модулі виходів після закінчення даного циклу перетворення переривають керування приєднаними вихідними колами, до яких під’єднані виконавчі пристрої – це запобігає від небезпечних наслідків аварії.
Стан окремих виходів модуля визначає демультиплексер, керований CPU пристрою керування. У декодері адреса вибраного мікропроцесором виходу і відповідне двійкове значення, пересилається з магістралі даних демультиплексером до вихідних систем модуля.
| <== попередня сторінка | | | наступна сторінка ==> |
| Контрольні питання | | | Програмування, мови програмування |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |