- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Порядок виконання роботи
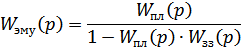
На рисунку наведена структурна схема зустрічно-паралельного включення ланок. Де Wпл(р) – передаточна функція ланки прямого ланцюга(ланка, що охоплена); Wзз(р) – передаточна функція ланки в ланцюзі зворотного зв’язку.

Wпл(р) – передаточна функція електромашинного підсилювача, яка має вигляд:

Wзз(р) – передаточна функція ланцюга зворотного зв’язку.
 У випадку жорсткого без інерційного зв’язку:
У випадку жорсткого без інерційного зв’язку:

У випадку гнучкого зворотного зв’язку:
Вихідні дані:
| kемп | kзз | Tзз | T1 | T2 |
| 2,5 | 1,8 | 0,8 | 0,5 | 0,2 |
Зворотний зв'язок — вплив результату функціонування якої-небудь системи на характер її подальшого функціонування.
1. Жорсткий додатній зворотній зв'язок.
Жорсткий зворотний зв'язок діє в усталеному і перехідному режимах роботи системи.
Додатний зворотний зв'язок впливає на систему таким чином, що збільшує вихідний результат її функціонування. В теорії автоматичного управління додатний зворотний зв'язок реалізується шляхом передачі на вхід системи частини вихідного сигналу таким чином, що сигнал зворотного зв'язку збігається у фазі з вхідним сигналом, що є еквівалентним збільшенню вхідного сигнала. В окремих випадках додатний зв'язок може призводити до генерації в системі — коли будь-яка флуктуація в системі передається на її вхід і підсилюється, завдяки чому в системі виникають незатухаючі коливання.

Знайдемо перехідну функцію, використавши зворотне перетворення Лапласа, та побудуємо її графік (Рис.1):


Рис. 1. Перехідна функція ланки з жорстким додатнім зворотнім зв’язком
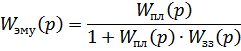
2. Жорсткий від’ємний зворотний зв'язок.
Від'ємний зворотний зв'язок впливає на систему таким чином, що зменшує вихідний результат її функціонування. В теорії автоматичного управління від'ємний зворотний зв'язок реалізується шляхом передачі на вхід системи частини вихідного сигналу таким чином, що сигнал зворотного зв'язку знаходиться у протифазі з вхідним сигналом, що є еквівалентним зменшенню вхідного сигнала, що призводить до зниження коефіцієнта підсилення системи, але при цьому також підвищується стійкість системи та зменшується похибка та інерційність системи.
Знайдемо перехідну функцію, використавши зворотне перетворення Лапласа, та побудуємо її графік (Рис. 2):

Показники якості:



Рис. 2. Перехідна функція ланки з жорстким від’ємним зворотнім зв’язком
3. Гнучкий додатній зворотній зв'язок.
Гнучкий зворотний зв'язок діє тільки у перехідному режимі роботи системи, несе інформацію про швидкість змін в системі. В теорії автоматичного управління реалізується додаванням в контур зворотного зв'язку диференцюючих елементів.

Знайдемо перехідну функцію, використавши зворотне перетворення Лапласа, та побудуємо її графік (Рис. 3):

Рис. 3. Перехідна функція ланки з гнучким додатнім зворотнім зв’язком
4. Гнучкий від’ємний зворотній зв'язок.
Знайдемо перехідну функцію, використавши зворотне перетворення Лапласа, та побудуємо її графік (Рис. 4):



Рис. 4. Перехідна функція ланки з гнучким від’ємним зворотнім зв’язком
Крім вище наведених видів зворотних зв’язків розрізняють:
Загальний зворотний зв'язок формується за рахунок передачі результату функціонування всієї системи на її вхід.
Місцевий зворотний зв'язок формується за рахунок передачі результату функціонування окремої ланки системи на вхід цієї ланки.
Також зовнішній зворотний зв’язок, який з’єднує вихід усієї системи з її входом, та внутрішній (місцевий), що з’єднує вихід окремого елемента або групи послідовно з’єднаних елементів з їх входом.
Висновок: Гнучкі зворотні зв’язки функціонують тільки в динамічних режимах і реалізуються ланками, що диференціюють. Жорсткі зворотні зв’язки функціонують як у статичних, так і в динамічних режимах і реалізуються позиційними ланками. Жорсткі і гнучкі зворотні зв’язки пливають на тривалість перехідного процесу і його характер. Позитивний зворотний зв'язок прискорює реакцію системи на зміну вхідного сигналу, тому його використовують у певних ситуаціях, коли потрібна швидка реакція у відповідь на зміну зовнішніх параметрів. У той же час позитивний зворотний зв'язок приводить до нестійкості і виникнення якісно нових систем. Нелінійний позитивний зворотний зв'язок веде до того, що система починає розвиватися в режимі із загостренням. Негативний зворотний зв'язок робить систему стійкішою до випадкової зміни параметрів. Тому виходячи з виду отриманих графіків перехідних функцій можна сказати, що використання жорсткого і гнучкого додатних зворотних зв’язків робить систему не стійкою і не уможливлює її використання на практиці. Застосування жорсткого та гнучкого від’ємних зворотних зв’язків робить систему стійкою, але враховуючи показники якості доцільним є використання гнучкого від’ємного зворотного зв’язку, тому що перегулювання дорівнює нулю, відсутні коливання та різкі сплески.
Міністерство освіти і науки України
Криворізький технічний університет
Кафедра інформатики, автоматики і систем управління
Лабораторна робота №6
з дисципліни: «Теорія автоматичного керування».
Тема: «дослідження впливу гнучких і жорстких зворотних зв’язків».
Виконав:
ст. гр. ЕМО 10-1
Будяк Денис
м. Кривий Ріг 2013 р.
| <== попередня сторінка | | | наступна сторінка ==> |
| Лабораторна робота № 6 | | | На якісні показники САК» |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |