РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Основні теоретичні відомості
ЗАГАЛЬНІ МЕТОДИЧНІ ВКАЗІВКИ
Містять рекомендації щодо вивчення третьої частини дисципліни “Основи сучасних систем управління” в пакеті програм MATLAB та SIMULINK.
Лабораторні роботи присвячені дослідженню питань синтезу фільтра Люенбергера, фільтра Калмана, застосування теореми розділення для синтезу стохастичних оптимальних систем, розглянуто теорію адаптивних та робастних систем.
Кожна лабораторна робота містить: мету роботи, основні теоретичні відомості, приклади, завдання, варіанти та контрольні питання.
Варіант роботи визначається в залежності від порядкового номеру в журналі.
Лабораторна робота 16
Відновлення стану системи. Спостерігач неповного порядку (фільтр Люенбергера)
Мета роботи:навчитись відновлювати вектор стану системи при неповних вимірах, будуючи при цьому спостерігач неповного порядку (фільтр Люенбергера).
Основні теоретичні відомості
В більшості задач регулювання використовується припущення, що повний вектор стану можна виміряти точно і повністю. Проте це рішення за звичай є нереальним. Найчастіше зустрічається випадок, коли для системи

можна виміряти тільки деяку лінійну комбінацію змінних стану

Величину  , яка є
, яка є  - мірним вектором, де за звичай менша розмірності вектора стану
- мірним вектором, де за звичай менша розмірності вектора стану  , називают змінною, що спостерігається.
, називают змінною, що спостерігається.
Необхідно визначити такий оператор  :
:
 ,
,
для якого  , де
, де  - відновлений стан. Після того, як вектор відновлено, можна використовувати закони управління, замінюючи дійсний стан на відновлений.
- відновлений стан. Після того, як вектор відновлено, можна використовувати закони управління, замінюючи дійсний стан на відновлений.
Розглянемо задачу побудови спостерігача з розмірністю, меншою розмірності системи, що спостерігається. Такі спостерігачі називаються спостерігачами пониженого (неповного) порядку (фільтр Люенбергера).
1й этап. Нехай система, яку необхідно спостерігати, описується системою рівнянь
,
 ,
,
де розмірність стану  рівна , а розмірність змінної , яка спостерігається, дорівнює ,
рівна , а розмірність змінної , яка спостерігається, дорівнює ,  . Оскільки рівняння вимірювань
. Оскільки рівняння вимірювань  дає
дає  лінійних рівнянь для невідомого стану
лінійних рівнянь для невідомого стану  , то необхідно відновити тільки
, то необхідно відновити тільки  лінійних комбінацій компонентів стану.
лінійних комбінацій компонентів стану.
Таким чином, на першому етапі задаємо матриці стану системи  , причому розмірність матриці
, причому розмірність матриці  менше розмірності матриці
менше розмірності матриці  .
.
2й етап. Введемо такий  - мірний вектор
- мірний вектор 

де  - матриця змінних, які необхідно відновити.
- матриця змінних, які необхідно відновити.
Із відношень

слідує, що повний стан системи описується виразом
 .
.
Зручно записати  ,
,
так що  .
.
можна знайти, враховуючи, що вектор задовольняє такому диференційному рівнянню:
 ,
,
чи
 (16.1)
(16.1)
Звернемо увагу на те, що в цьому рівнянні є вхідною змінною.
Для того, щоб знайти спостерігач для с показниками, які будуть задовольняти умовам стійкості, задамо полюса спостерігача в лівій півплощині на заданій відстані від уявної осі. Знаючи матрицю стану системи та матрицю управління  , а також бажане розміщення полюсів синтезуємої системи, можна визначити коефіцієнти підсилення спостерігача
, а також бажане розміщення полюсів синтезуємої системи, можна визначити коефіцієнти підсилення спостерігача  .
.
Для того, щоб отримати спостерігач пониженого порядку без визначення похідної по , що необхідно для одержання необхідної інформації про , припустимо
 . (16.2)
. (16.2)
використовуючи рівняння (16.1) та (16.2) визначимо, що  задовольняє диференційному рівнянню:
задовольняє диференційному рівнянню:

Тоді відновлений стан системи визначається через  за допомогою виразу:
за допомогою виразу:
 . (16.3)
. (16.3)
Рівняння (16.2), (16.3) описують спостерігач пониженого порядку.
Таким чином, для синтезу спостерігача пониженого порядку на другому етапі необхідно задати матрицю так, щоб вона доповнювала матрицю вимірювань . Крім цього, необхідно вибрати значення коренів  синтезуємого спостерігача так, щоб він був стійким (тобто корені повинні лежати в лівій півплощині). Рішаючи рівняння
синтезуємого спостерігача так, щоб він був стійким (тобто корені повинні лежати в лівій півплощині). Рішаючи рівняння  , отримаємо коефіцієнти підсилення спостерігача.
, отримаємо коефіцієнти підсилення спостерігача.
Схема з’єднання об’єкта з спостерігачем представлена на рис.16.1.
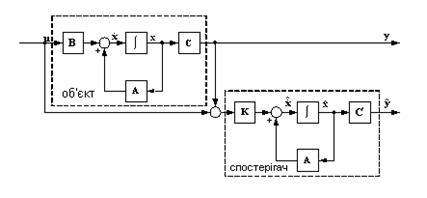 Рис.16.1. Схема з’єднання об’єкта з спостерігачем неповного порядку
Рис.16.1. Схема з’єднання об’єкта з спостерігачем неповного порядку
В пакеті програм MATLAB можна вирішити задачу побудови спостерігача неповного порядку (фільтр Люенбергера), виконавши даний алгоритм.
1. В просторі стану задати четвірку матриць об’єкта. При цьому матриця С має неповний ранг, тобто маючи 5 змінних стану, вимірюються лише 3.
Vt=69.44; % velocity: 250 km/hr (69.44 m/sec):
A0=[-0.136 0.1403 0.0001 -0.9986 0;
0 0 1.003 0 0;
-56.21 0 -11.25 3.332 0;
1.190 0 -0.210 -0.240 0;
0 0 0 1 0];
B0=[0 0 160 0 0 ]';
C0=[ 0 0 1 0 0; 0 0 0 1 0; 0 0 0 0 1]; D0=zeros(3,1);
2. В просторі стану задати четвірку матриць виконавчого механізму. Зробити послідовне з’єднання виконавчого механізму та об’єкту. Виділити четвірку матриць отриманого з’єднання:
Ta=0.5;
sysac=ss(-1/Ta,1/Ta,1,0);
sysai=ss(A0,B0,C0,D0);
sysser=series(sysac, sysai);
[Ase,Bse,Cse,Dse]=ssdata(sysser);
3. Для синтезу спостерігача пониженого порядку задаємо матрицю  (
(  ), так щоб матриця
), так щоб матриця  мала повний ранг. Також необхідно задати вектор
мала повний ранг. Також необхідно задати вектор  бажаних власних чисел спостерігача.
бажаних власних чисел спостерігача.
disp('L_Filter')
Csh=[1 0 0 0 0 0; 0 1 0 0 0 0;0 0 0 0 0 1];
C=[Cse;Csh];
L=inv(C);
L1=L(:,1:3);
L2=L(:,4:6);
Ak=Csh*Ase*L1;
Bk=Cse*Ase*L2;
Aksht=(Csh*Ase*L2)';
Bksht=(Cse*Ase*L2)';
Pk= [-0.339 -1.0254 -1];
4. За допомогою оператора place знаходимо коефіцієнти підсилення  такі, щоб власні числа синтезуємого спостерігача дорівнювали .
такі, щоб власні числа синтезуємого спостерігача дорівнювали .
Kksht=place(Aksht,Bksht,Pk);
K=Kksht';
5. Знаходимо матриці простору стану спостерігача 
Aest=[(Csh*Ase*L2-K*Cse*Ase*L2)];
By=(Csh*Ase*L2*K+Csh*Ase*L1-K*Cse*Ase*L1-K*Cse*Ase*L2*K);
Bu=(Csh*Bse-K*Cse*Bse);
Best=[By Bu];
Cest=L2([1:2 6],:);
D1=(L1+L2*K);
D2=D1([1:2 6],:);
Dest=[D2 zeros(3,1)];
est=ss(Aest,Best,Cest,Dest);
6. На спостерігач подаються змінні із виходу об’єкта, що вимірюються, а також управління, що подається і на об’єкт. Це складне з’єднання задається за допомогою оператора connect. Спочатку за допомогою паралельного з’єднання подаємо управління на спостерігач та на об’єкт (4й вхід спостерігача, 1й вхід об’єкта). Отримаємо систему с 4мя входами (3 входи спостерігача, на які подаються вимірювані змінні з об’єкта, і 1 вхід управління, що поступає і на об’єкт и на спостерігач) та 6ю виходами (3 виходи спостерігача (відновлені змінні), 3 виходи об’єкта (вимірювані змінні). За допомогою матриці  вказуємо на які входи системи (перший стовпчик) які виходи (другий стовпчик) ми подаємо. Також необхідно указати, які входи будуть входами системи (inputs=[4] – вхід управління), та які виходи будуть виходами системи (outputs=[1 2 4 5 6 3]).
вказуємо на які входи системи (перший стовпчик) які виходи (другий стовпчик) ми подаємо. Також необхідно указати, які входи будуть входами системи (inputs=[4] – вхід управління), та які виходи будуть виходами системи (outputs=[1 2 4 5 6 3]).
disp('Series interconnection "nominal" sys and L_Filter')
syspar=parallel(est,sysai,4,1,[],[]);
Q=[1 4
2 5
3 6];
inputs=[4];
outputs=[1 2 4 5 6 3];
sysest=connect(syspar,Q,inputs,outputs);
[Asf,Bsf,Csf,Dsf]=ssdata(sysest);
A=eig(Asf)
7. Коли відновлено повний вектор стану, можна приміняти закони синтезу оптимального детермінованого регулятора.
R1=[1 4 0.8 25 0.1 3]; R1=diag(R1);
R2=0.1;
[P,S,E]=lqr(Ase,Bse,R1,R2);
8. Замикаємо систему з відновленим станом синтезованим детермінованим регулятором.
cl=feedback(sysest,P);
acl=eig(cl)
[Acl,Bcl,Ccl,Dcl]=ssdata(cl);
9. Якість синтезованої системи оцінюємо за допомогою  -норми.
-норми.
H2_n=normh2(Acl,Bcl,Ccl,Dcl)
| <== попередня сторінка | | | наступна сторінка ==> |
| СУЧАСНОЇ ТЕОРІЇ УПРАВЛІННЯ | | | Завдання |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |