РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Розв’язування ЗЛП графічним методом
Розглянемо найпростіший випадок n=2.


Така задача називається плоскою. Кожна нерівність системи обмежень визначає частину площини, що лежить вище (нижче) відповідної прямої. Уся система обмежень визначає на площині х1, х2 багатокутник, що називається припустимою областю (припустимою множиною) задачі.
Кожна точка Р(х1, х2 ) усередині цієї множини і на її межі визначає припустимий план задачі. Необхідно з усіх припустимих планів задачі знайти найкращий (оптимальний).
Вектор  є градієнтом функції F і перпендикулярний до лінії рівня F=const.
є градієнтом функції F і перпендикулярний до лінії рівня F=const.
Проведемо лінію рівня F=0 - пряма l: с1х1 + с2х2 = 0 проходить через початок координат. Побудуємо  у точці О(0;0) і виконаємо паралельне перенесення прямої l у напрямку
у точці О(0;0) і виконаємо паралельне перенесення прямої l у напрямку  . У процесі перенесення пряма проходить через різні точки припустимої множини. Точка, у якій відбувається останнє торкання цією прямою області (точка «прощання») і визначає оптимальний план задачі. Якщо «прощання» відбувається по стороні багатокутника, кожна її точка дає оптимальний план; задача має безліч рішень. Якщо такої точки не існує, задача не має рішень.
. У процесі перенесення пряма проходить через різні точки припустимої множини. Точка, у якій відбувається останнє торкання цією прямою області (точка «прощання») і визначає оптимальний план задачі. Якщо «прощання» відбувається по стороні багатокутника, кожна її точка дає оптимальний план; задача має безліч рішень. Якщо такої точки не існує, задача не має рішень.
Приклад 


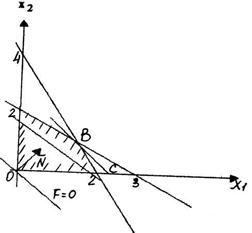
 А (0;2); В (1,5;1); С (2;0)
А (0;2); В (1,5;1); С (2;0)
Припустима множина: чотирикутник ОАВС. Точка «прощання» В (1,5;1).
Оптимальний план 

2. Розглянемо задачу лінійного програмування в канонічній формі
 (2.1)
(2.1)
 (2.2)
(2.2)
 ; j= 1,... n (2.3)
; j= 1,... n (2.3)
Введемо в розгляд матриці 



Задача набуде наступного вигляду:
F = С • X"max (2.4)
А• Х=У (2.5)
X ≥ 0 (2.6)
Система обмежень (2.2) і (2.3) (або (2.5) і (2.6)) задає припустиму множину - багатогранник (симплекс) у n-мірному просторі.
Точка максимуму знаходиться в одній з вершин багатогранника.
Ціль симплекса-методу: за найменше число кроків знайти цю вершину.
Читайте також:
- VII. Нахождение общего решения методом характеристик
- АВТОМАТИЗАЦІЯ РОЗВ’ЯЗУВАННЯ КОМПЛЕКСУ ЗАДАЧ З ОБЛІКУ ОСНОВНИХ ЗАСОБІВ ТА НЕМАТЕРІАЛЬНИХ АКТИВІВ
- Алгоритм розв’язування задачі
- Алгоритм розв’язування задачі
- Алгоритм розв’язування задачі
- Алгоритм розв’язування задачі
- Алгоритм розв’язування задачі
- Алгоритм розв’язування задачі
- Алгоритм розв’язування задачі оптимізації в Excel
- Аналіз перед розв’язуванням задачі
- Аналіз перед розв’язуванням задачі
- Аналіз причин виникнення проблеми та обґрунтування її розв’язання програмним методом
| <== попередня сторінка | | | наступна сторінка ==> |
| Задачі лінійного програмування та методи їх розв’язування | | | Алгоритм симплекс-методу |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |