РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Рух механізму під дією заданих сил
Режими руху:
- стадія пуску – швидкість руху ведучої ланки зростає від 0 до max. Робота рушійних сил більша роботи сил опору ( );
);
- стадія сталого руху – швидкість руху ведучої ланки стабілізувалась, робота рушійних сил дорівнює роботі сил опору за цикл навантаження ( , в окремі моменти циклу
, в окремі моменти циклу  );
);
- стадія вибігу (зупинки) – швидкість руху ведучої ланки спадає, робота рушійних сил менша роботи сил опору ( ).
).
Зведення сил. При складанні рівнянь руху дії всіх сил і моментів сил, прикладених до різних ланок механізму, зручно умовно замінити дією тільки однієї сили або моменту, прикладених до якої-небудь ланки механізму. Такі сили й моменти сил одержали назву зведених, а ланки, до яких вони прикладені, ланками зведення. Робота зведеної сили або моменту на її можливому переміщенні дорівнює сумі робіт всіх сил, прикладених до ланок механізму на їхніх можливих переміщеннях.
Рівняння руху Лагранжа:
 ,
,
де  - кінетична енергія,
- кінетична енергія,  - узагальнена координата,
- узагальнена координата,  - узагальнена швидкість,
- узагальнена швидкість,  - потенційна енергія системи,
- потенційна енергія системи,  - узагальнена сила, що відповідає узагальненій координаті.
- узагальнена сила, що відповідає узагальненій координаті.
У випадку обертового руху.
 ,
,
 ,
,
 .
.
У випадку поступального руху.
 ,
,
 ,
,
 .
.
Вирази для визначення зведеної сили й моменту.
 ,
,
 ,
,
де ,
,  - поточні значення сил, що зводять, і моментів, що діють на ланки,
- поточні значення сил, що зводять, і моментів, що діють на ланки,  - лінійна швидкість ланки зведення;
- лінійна швидкість ланки зведення;  - кут між напрямком сили і її переміщенням;
- кут між напрямком сили і її переміщенням;  - кутова швидкість ланки зведення.
- кутова швидкість ланки зведення.
Розглянемо на прикладі кривошипно-шатунного механізму (рис. 3.1) метод визначення зведеного моменту.

|
| Рис. 3.1 |
|
| Рис. 3.2 |
Якщо знехтувати дією сил тертя, ваги, інерції та вважати, що кривошип 1 рухається рівномірно з постійною кутовою швидкістю  , то величину зведеного моменту, який прикладено в кожний момент часу до ланки 1 можна визначити згідно наступної залежності:
, то величину зведеного моменту, який прикладено в кожний момент часу до ланки 1 можна визначити згідно наступної залежності:
 , [H·м].
, [H·м].
де  - сила корисного опору,
- сила корисного опору,  - швидкість повзуна 3 в кожен момент часу.
- швидкість повзуна 3 в кожен момент часу.
Робота рушійних сил за цикл навантаження дорівнює роботі сил корисного опору  . При цьому
. При цьому
 .
.
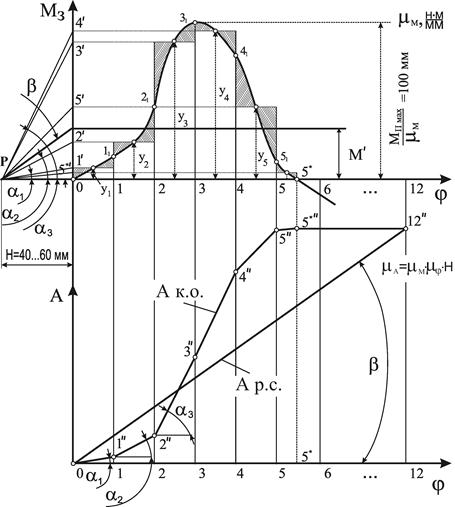
Для визначення зведеного моменту застосовуємо метод графічного інтегрування (рис. 3.2):
1. Розіб’ємо один оберт кривошипа  на n (n=12; 24) рівних частин таким чином, щоб рух в границях одного інтервалу можна було розглядати рівномірним.
на n (n=12; 24) рівних частин таким чином, щоб рух в границях одного інтервалу можна було розглядати рівномірним.
2. Заміняємо криволінійні трапеції  ;
;  ;… рівновеликими за площею прямокутниками зі сторонами 01 і у1; 12 і у2; 23 і у3; …
;… рівновеликими за площею прямокутниками зі сторонами 01 і у1; 12 і у2; 23 і у3; …
3. Кінці середніх ординат у1, у2, … проектують на вісь  й одержують точки
й одержують точки  ;
;  ;
;  ;…
;…
4. З’єднують їх з довільно обраним полюсом  променями Р; Р; Р;…
променями Р; Р; Р;…
5. На графіку робіт А проводять лінії  ;
;  ;
;  ;… паралельні променям Р; Р; Р;…. Перший відрізок проводять із початку координат до перетину з вертикальною віссю, що обмежує праворуч інтервал 0-1. Другий відрізок проводять із отриманої точки перетину з границею першого інтервалу до перетину з границею другого інтервалу 1-2 і т.д.
;… паралельні променям Р; Р; Р;…. Перший відрізок проводять із початку координат до перетину з вертикальною віссю, що обмежує праворуч інтервал 0-1. Другий відрізок проводять із отриманої точки перетину з границею першого інтервалу до перетину з границею другого інтервалу 1-2 і т.д.
6. З’єднують плавною кривою отримані точки. Отримана крива являється графіком роботи сил корисного опору ( ).
).
Точка  являється кінцем робочого ходу механізму, далі механізм не виконує корисної роботи, тому з цієї точки можна провести горизонтальну пряму до 12 положення механізму. Дванадцяте положення механізму співпадає з нульовим положенням (кривошип зробив один повний оберт). З’єднавши прямою точку, що відповідає 12 положенню з нульовим отримаємо графік робіт рушійних сил (
являється кінцем робочого ходу механізму, далі механізм не виконує корисної роботи, тому з цієї точки можна провести горизонтальну пряму до 12 положення механізму. Дванадцяте положення механізму співпадає з нульовим положенням (кривошип зробив один повний оберт). З’єднавши прямою точку, що відповідає 12 положенню з нульовим отримаємо графік робіт рушійних сил ( ). Цей графік утворює з віссю абсцисс кут
). Цей графік утворює з віссю абсцисс кут  . Відкладаємо із полюса Р на графіку зведеного моменту промінь під кутом та знаходимо точку його перетину з віссю ординат. Величина
. Відкладаємо із полюса Р на графіку зведеного моменту промінь під кутом та знаходимо точку його перетину з віссю ординат. Величина  (див. рис. 3.2) відповідає величині постійно діючого зведеного моменту
(див. рис. 3.2) відповідає величині постійно діючого зведеного моменту  , який прикладено до кривошипа
, який прикладено до кривошипа  . При цьому цей момент розвиває постійну потужність
. При цьому цей момент розвиває постійну потужність  .
.
Читайте також:
- Адвокатура — неодмінний складовий елемент механізму забезпечення прав людини.
- Адміністративно-правові методи забезпечення економічного механізму управління охороною довкілля
- Аналіз ступеня вільності механізму. Наведемо визначення механізму, враховуючи нові поняття.
- Апарат держави. Орган держави. Інститут держави Апарат держави - частина механізму держави.
- Вертикальне наведення.Вертикальне наведення виконується за допомогою прицілу, бічного рівня і підйомного механізму.
- Вибір раціональних способів усунення заданих дефектів
- Вибір раціональних способів усунення заданих дефектів
- Види механізму дії іонізуючого випромінювання
- Визначення закону руху механізму
- Визначення основних розмірів кулачкового механізму
- Вимірювання опорів за допомогою магнітоелектричного вимірювального механізму
- Виникнення мистецтва як унікального механізму культурної еволюції.
| <== попередня сторінка | | | наступна сторінка ==> |
| Сили, що діють у механізмі | | |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |