РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Тема 17. Поплавкові і гідравлічні рівнеміри
Рівня
Тема 14. Вимірювання витрат за величиною тиску та
-Загальнівідомості
Вимірювання параметрів рідких та газоподібних речовин
широко застосовують у різних галузях народного господарства,
зокрема, в нафтодобувній промисловості, в нафтопереробних та
нафтогазотранспортних системах, харчовій промисловості тощо.
Головними параметрами руху потоків рідин та газоподібних
речовин є витрати - кількість речовини, що протікає через
поперечний переріз трубопроводу за одиницю часу.
Розрізняють такі види витрат: об'ємні витрати QVV
= , де V -
об'єм; t - час та масові витрати QMM
t
= , де M - маса речовини.
t
Співвідношення між масовими та об'ємними витратами
визначається залежністю QM
= ⋅ñ QV, де ñ - густина речовини.
Одиницями об'ємних витрат можуть бути м с3/ ,3/ , /л с , а
масовими - / , /
тощо. Вимірювання витрат становлять
понад 15 % від усіх промислових вимірювань. Похибки
вимірювань витрат в промислових умовах становлять 1...2 %,
хоча в окремих галузях спостерігається тенденція її зменшення
до рівня 0,2...0,5%.
Діапазон вимірювань витрат рідин можна розділити на три
піддіапазони: малі витрати - до 15 10−4 м с3/ , середні витрати -
15 10−4 м с3/ … 0,5 м с3/ та великі витрати - понад 0,5 м с3/ .
Прилади для вимірювань витрат називаються витратомірами,
а для вимірювання кількості речовини - лічильниками кількості
або просто лічильниками.
-Витратоміризмінногоперепадутиску

 Метод вимірювання витрат за перепадом тиску грунтується
Метод вимірювання витрат за перепадом тиску грунтується
на використанні завужувального пристрою (діафрагма, сопло,
труба Вентурі тощо), що створює перепад тиску на ділянці
трубопроводу, де встановлений дросельний пристрій для
завуження струменя рідини. Як вторинний прилад у цьому
випадку використовується диференціальний манометр, що
вимірює перепад тиску.
На рис.14.1 показана ділянка трубопроводу з дросельним
завужувальним пристроєм (рис.14.1,а) у вигляді діафрагми, а
також характер розподілу тиску вздовж стінки трубопроводу
(рис.14.1,б). Починаючи з перерізу А-А, струмінь досліджуваної
рідини завужується, а середня швидкість потоку зростає, дещо
зростає і тиск біля стінки звужувальної діафрагми. На деякій
ділянці після діафрагми внаслідок інерції струмінь продовжує
заву- жуватися і досягає найбільшого завуження в перерізі В-В.
Тиск потоку падає і в перерізі В-В досягає найменшого значення
pc. Після перерізу В-В струмінь починає розширюватися,
швидкість потоку зменшуватися, а тиск зростає до деякого
значення Pc< Pa.
а)
б)
Рис. 14.1. До принципу дії витратоміра з звужувальною діафрагмою




















 Проведення досліджень даної моделі (рис.14.1) дозволило
Проведення досліджень даної моделі (рис.14.1) дозволило
отримати аналітичні вирази для визначення об’ємної QVта
масової QMвитрат.
Об’ємна витрата
Q = v S
V b b
=
S
b
2∆P
ñ
= AS
2∆P
ñ
; (14.1)
S
−
S
b
масова витрата
a
= ñ
ñ∆ , (14.2)
Q
M
QV= AS02
P
де S0 - площа завуженого отвору, A - так званий коефіцієнт
витрат, який характеризує співвідношення між перерізами S0,
Sa, та Sbі визначається експериментально.
В реальних конструкціях витратомірів із завужувальною
діафрагмою відбір тиску здійснюється звичайно не в перерізах
A та B , а безпосередньо до та після завужувальної діафрагми.
У цьому випадку
P P P12 дещо відрізняється від
∆ =P Pa− Pb.
Ця
відмінність
і
враховується
при
експериментальному визначенні коефіцієнта А
Вимірювальна схема витратоміра даного типу наведена на
рис. 14.2. За допомогою завужувальної діафрагми 1 вимірювані
витрати перетворюються у перепад тиску
P P P12,а у
диференціальному манометрі 2 перепад тиску перетворюється в
силу Fx, пропорційну різниці цих тисків, а отже, пропорційну
квадрату вимірюваних витрат:
Fx= ⋅k Q .
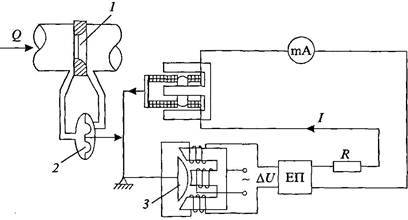





Рис. 14.2. Принципова схема витратоміра статичного зрівноважувального
перетворення
Сила Fx, що діє на важіль осердя 3 диференціально-
трансформаторного перетворювача, повертає його на деякий
кут, внаслідок чого порушується баланс ЕРС у верхній та
нижній
вторинних
обмотках
диференціально-
трансформаторйого перетворювача, в результаті чого
з'являється різниця напруг ∆U . Після підсилення ця напруга
подається в коло обмотки зворотного феодинамічного
перетворювача,в якому створюється компенсуюча сила Fk,
пропорційна квадрату електричного струму I , що протікає
через обмотки зворотного перетворювача
Fk= ⋅k I1, (14.3)
Якщо сили Fxі Fkоднакові, значення вимірюваних витрат
розраховується як
Q I= ⋅k1 = KI . (14.4)
k
Отже покази міліамперметра у цьому випадку будуть
пропорційними вимірюваним витратам.
Дещо вищу точність мають витратоміри, в яких різниця
тисків
∆P , яка створюється завужувальним пристроєм,
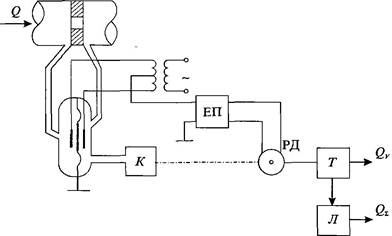 урівноважується тиском, що створюється компресором
урівноважується тиском, що створюється компресором
(рис.14.3).
Рис. 14.3. Принципова схема витратоміра астатичного
зрівноважувального перетворення
Оскільки тиск, що розвивається компресором K ,
пропорційний квадрату частоти обертання ротора реверсивного
двигуна РД, то ця частота, що вимірюється тахометром Т,
пропорційна вимірюваним витратам, а загальна кількість обертів
ротора, визначена лічильником Л, вказує на кількість речовини,
що пройшла через трубопровід.
Вимірювання витрат за перепадом тиску є найпоширенішим
методом вимірювання витрат рідких та газоподібних речовин в
умовах високого тиску (до 100 МПа) та високих температур - до
декількох сотень градусів за Цельсієм. Недоліком цього методу
є порівняно невисока точність. Похибка витратомірів змінного
тиску становить 1...2 %.
-Витратоміристалогоперепадутиску
Серед витратомірів сталого перепаду тиску для вимірювань
малих витрат рідини ( 0,01...16 м г3/ ) та газів ( 0,01...40 м г3/ ) у
вертикальних трубопроводах найпоширенішими є так звані
ротаметри. Ротаметр (рис. 14.4,а) - це вертикальна труба 1












 конічного перерізу з розміщеним в ній поплавком 2. Поплавок
конічного перерізу з розміщеним в ній поплавком 2. Поплавок
звичайно має циліндричну форму з нижньою конічною
частиною та верхнім бортиком з вирізаними в ньому скісними
рівчаками. При протіканні через ці рівчаки досліджуваної
рідини остання забезпечує обертання поплавка і його
центрування по осі трубопроводу, що усуває її тертя об стінки
труби. Під дією струменя досліджуваної рідини поплавок буде
підніматися вгору. В міру підняття поплавка площа Sb
кільцевого проміжку між ним і внутрішньою поверхнею труби
збільшуватиметься до положення, при якому підйомна сила, що
діє на поплавок, урівноважиться силою тяжіння поплавка.
Отже, певним витратам відповідатиме певна площа Sb
кільцевого проміжку, тобто певна висота поплавка.
Рис.14.4. До принципу дії ротаметрів
Рівняння, що зв'язує об'ємні витрати QVз площею Sb
звичайно записують у вигляді, аналогічному рівнянню витрат
для витратоміра із завуженою діафрагмою:
Q = v S
V b b
=
S
b
⋅
2∆P
ñ
, (14.5)
S
c
−
S
b
a
 де Saі Sbплощі струменя рідини відповідно в перерізах А-А та
де Saі Sbплощі струменя рідини відповідно в перерізах А-А та
В-В; vb - швидкість струменя в перерізі В-В (у завуженій
частині); ñc - густина досліджуваного середовища; ∆P -
різниця тисків, що діють на поплавок знизу та зверху.
У правій частині наведеного вище рівняння витрат всі
величини є сталими, зокрема ∆P . Дійсно, сила тяжіння
поплавка в досліджуваному середовищі
( ) , (14.6)
FT= V gnñn− ñc
а підйомна сила, викликана дією досліджуваного потоку
Fn= ∆S Pn, (14.7)
де Vnта Sn - об’єм та максимальна (перпендикулярна напряму
потоку) площа перерізу поплавка, g - прискорення вільного
падіння.
У зрівноваженому стані, коли FT= Fn, буде
( )
V gnñn− ñc= ∆S Pn, (14.8)
V g ( ñ − ñ )
∆ =
P
n
n c
Sn
, (14.9)
Оскільки всі величини в правій частині останнього виразу є
сталими, то і ∆P є незмінним, незалежно від швидкості
досліджуваного потоку, тобто від витрат.
Отже, витрати однозначно визначатимуться площею
струменя досліджуваного середовища в перерізі В-В і,
відповідно, висотою підняття поплавка.
Звичайно в ротаметрах використовуються скляні конічні
трубки, на зовнішній поверхні яких нанесена шкала.
Показником є верхня горизонтальна площина поплавка. Такі
ротаметри застосовуються для вимірювання витрат газів та
прозорих рідин, що знаходяться під тиском не більше ніж 0,6
МПа.
Для вимірювань витрат середовищ, що знаходяться під
високим тиском, використовують ротаметри з металевою
конічною трубкою. Такі ротаметри звичайно мають





 диференціально-трансформаторні (рис. 14.4,б) або пневматичні
диференціально-трансформаторні (рис. 14.4,б) або пневматичні
вторинні перетворювачі. їх класи точності 1,5 та 2,5.
-Витратоміридинамічноготиску
Вимірювання витрати такими приладами грунтується на
залежності динамічного тиску (напору) від швидкості потоку
контрольованого середовища.
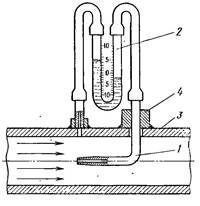
Динамічний напір, а отже і швидкість потоку вимірюють
швидкісними трубами в комплекті з дифманометром (рис. 14.5).
Рис. 14.5. Схема вимірювання динамічного напору
1 – напірна трубка; 2 – дифманометр; 3 – трубопровід; 4 – сальник
В даній схемі за допомогою лівої трубки вимірюють
статичний тиск, а правої (вигнутої під кутом) – повний тиск.
Дифманометр 2, який з’єднує обидві трубки, показує різницю
між повним PП і статичним PCтиском, іншими словами
динамічний тиск Pд (Pд=PП − PC). Якщо при цьому різниця
рівнів робочої рідини в дифманометрі дорівнює h , то швидкість
v [ м с/ ] потоку визначається за формулою
v
=
î
2g
ñ
h
(
ñ1)
− ñ , (14.10)
де g - прискорення вільного падіння ( м с/2); ñ і ñ1 -
відповідно густина контрольованого середовища і робочої



 рідини в дифманометрі ( кг м/3); î - поправочний коефіцієнт,
рідини в дифманометрі ( кг м/3); î - поправочний коефіцієнт,
який враховує конструктивні особливості і неточність
виготовлення трубок.
Для Re 700 î ≈ 1; при Re 700 , î < 1.
При визначенні витрат Q швидкісними трубками, спочатку
необхідно визначити середню по площі поперечного перерізу S
трубопроводу швидкість vср потоку
vcp
= î
2g
ñ
hcp
( ñ1− ñ2)
, (14.11)
де hcp - середнє значення різниці рівнів, яке відповідає середній
швидкості потоку рідини.
Із наведеного отримаєм, що
Q Svcp. (14.12)
Витратоміри динамічного напору застосовують тільки в
лабораторних умовах та при проведенні експериментів.
-Витратоміризмінногорівня
Принцип дії таких витратомірів грунтується на залежності
висоти рівня рідини в посудинах від витрати неперервно
поступаючої і витікаючої із даної посудини рідини. Витікання
рідини із посудини відбувається через отвір в дні або в боковій
стінці.
Витратоміри змінного рівня можуть бути використаними для
вимірювання витрати газонасиченої нафти, стічних вод та
забруднених рідин.






Рис. 14.6. Схеми витратомірів змінного рівня
а) витратомір змінного рівня; б) витратомір з щілинним отвором; в)
визначення форми отвору витікання
У витратомірах змінного рівня з затопленим отвором (рис.
14.6, а), вимірюваний потік надходить в посудину 3 через
патрубок 4. На дні посудини в якості отвору витікання
встановлюється діафрагма 1. Для запобігання забрудненню
діафрагми та заспокоєння потоку рідини встановлюють
перегородки 5. Рівень в посудині вимірюється за допомогою
водомірного скла 2.
Об’ємна витрата QVречовини що витікає через діафрагму,
площею поперечного перерізу F0визначиться як
QV= á F02gH , (14.13)
де á - коефіцієнт витрати.
Звідси випливає, що об’ємна витрата із посудини не залежить
від густини рідини, а визначається тільки рівнем H .
При встановленні діафрагми в боковій стінці, розрахункова
формула (14.13) залишається тою ж, а рівень H відраховується
від центра діафрагми.
Витратомір з щілинним отвором (рис. 14.6, б) складається з
посудини 1, в яку через патрубок 2 надходить вимірювана
рідина. Всередині посудини знаходиться перегородка, оснащена
щитом з зливною щілиною 5, через яку відбувається витікання
рідини з лівої частини порожнини у праву з вихідним патрубком
8. Для вимірювання рівня H над нижньою кромкою щілини в

 захисному чохлі встановлена п’єзометрична трубка 3, через яку
захисному чохлі встановлена п’єзометрична трубка 3, через яку
неперервно продувається повітря, яке попередньо пройшло
систему підготовки газу 6. Тиск повітря в трубці 3, який
вимірюється динамометром 7 служить мірою рівня H .
Необхідно зауважити, що залежність об’ємної витрати QVвід
рівня H визначається формою отвору витоку (рис. 14.16, в).
Для даного випадку отримати бажану лінійну залежність
QV= kH , (14.14)
(де k - коефіцієнт пропорційності, який визначається з умови
k QmaxHmax) можна у випадку коли ширина елементарної
площадки x зв’язана з її висотою y співвідношенням
x C y , (14.15)
де C - конструктивна стала.
Аналіз останнього рівняння вказує на те, що профіль щілини
повинен мати гіперболічну форму.
Із зазначеного можна зробити висновок, що для щілинних
витратомірів, для вимірювання об’ємної витрати, необхідно
вимірювати рівень H рідини, а для отримання масової витрати
– тиск гідравлічного стовпа H gñ .
 Тема 15. Безконтактні витратоміри
Тема 15. Безконтактні витратоміри
-Електромагнітнівитратоміри
Принцип дії електромагнітних витратомірів грунтується на
законіелектромагнітноїіндукції –законіФарадея, згідно якого,
в провіднику, який перетинає магнітні силові лінії, індукується
ЕРС, що є пропорційною швидкості переміщення даного
провідника.
Якщо використати в якості провідника потік
електропровідної рідини, що протікає між полюсами магніту і
виміряти неведену в рідині ЕРС, то можна визначити швидкість
потоку або об’ємну витрату рідини.
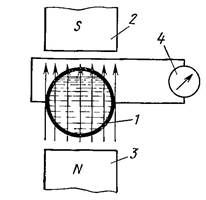
Схема електромагнітного витратоміра наведена на рис. 15.1.
Рис. 15.1. Схема електромагнітного витратоміра з
постійним магнітним полем
1 – трубопровід; 2, 3 – полюси магніту; 4 – електровимірювальний
прилад, шкала якого проградуйована в одиницях витрати
Трубопровід 1, виконаний з немагнітного матеріалу
(фторопласт, ебоніт тощо) з рідиною яка в ньому переміщується,
поміщено між полюсами 2 і 3 магніту (електромагніту)
перепендикулярно напрямку силових ліній магнітного поля. В
стінці трубопроводу діаметрально протилежно з внутрішньої
поверхні труби змонтовані вимірювальні електроди. Під дією
магнітного поля іони, що знаходяться в рідині, переміщуються і
віддають свої заряди вимірювальним електродам, створюючи на


 них ЕРС E , яка є пропорційною швидкості потоку рідини. До
них ЕРС E , яка є пропорційною швидкості потоку рідини. До
електродів підключено вимірювальний прилад 4, шкала якого
проградуйована в одиницях витрати.
Величина ЕРС E у випадку постійного магнітного поля,
визначиться з основного рівняння електромагнітної індукції
E Bdvcp, (15.1)
де B - магнітна індукція в зазорі між полюсами магніту; d -
внутрішній діаметр трубопровода (довжина провідника); vcp -
середня швидкість потоку рідини.
Швидкість vcpможна визначити через об’ємну витрату QV
Q
v
cp
= V , (15.2)
S
де S - внутрішня площа поперечного перерізу трубопроводу
d2
(
S = ð).
Підставивши в (15.1) значення vcpз (15.2), отримаємо
E
=
4B
Q . (15.3)
ð d
V
Оскільки B const і d const , то вираз (15.3) перепишеться
E kQV, (15.4)
де k - коефіцієнт пропорційності ( k
=
4B
ð d
).
З (15.4) видно, що при однорідному магнітному полі, ЕРС E
прямопропорційна об’ємній витраті QV.
На теперішній час, електромагнітні витратоміри
застосовують тільки для рідин з електричною провідністю не
нижче ніж −3
10 −10− См м/ .
Основним недоліком електромагнітних витратомірів з
постійним магнітним полем є виникнення на електродах ЕРС
поляризації, що призводить до значних похибок вимірювань.
 Паразитна ЕРС поляризації може бути різко зменшена при
Паразитна ЕРС поляризації може бути різко зменшена при
застосуванні в якості магнітів електромагнітів, що живляться від
джерела змінного струму.
Електромагнітним витратомірам притаманно ряд переваг: на
покази не впливають зважені в рідині частинки і бульбашки
газу, а також тиск, температура, в’язкість і густина. Дані
витратоміри є практично безінерційними і можуть бути
застосовані при вимірюванні швидко змінних потоків.
Електромагнітні витратоміри дозволяють вимірювати
витрату в межах від 1 до 25003/
для трубопроводів
діаметром 10-1000 мм при лінійній щвидкості потоку
0,6 10,0 /− м с . Класи точності витратомірів 1,0 – 2,5.
-Калориметричнівитратоміри
Принцип дії калориметричних витратомірів грунтується на
нагріванні потоку рідини чи газу і вимірюванні різниці
температур до і після нагрівача.
Схема калориметричного витратоміра наведена на рис.15.2.
Рис. 15.2. Схема калориметричного витратоміра
В трубопроводі (рис.15.2) встановлено нагрівач 3, на рівних
відстанях від центра якого знаходяться терморезистивні
термометри 1 і 2, які вимірюють температуру t1потоку до
нагрівача і температуру t2після нього.
Якщо знехтувати теплотою, що віддається потоком в
навколишнє середовище, то рівняння теплового балансу в
цьому випадку запишеться
q = kQ c t∆ , (15.5)
t
M p
де qt - кількість теплоти, що віддається нагрівачем рідині чи
газу; k - поправочний коефіцієнт на нерівномірність розподілу
температур по площі поперечного перерізу труби; QM - масова
витрата рідинни чи газу; cp - питома масова теплоємність при
середньому значенні температури
t t= +1t2/ 2 ; ∆t - різниця
температур середовища до і після нагрівача (
t t2t1) .
В калориметричних витратомірах теплота до потоку рідини
підводиться звичайно електронагрівачем. В цьому випадку
qt= 0,24 I R2, (15.6)
де I та R - відповідно величина струму та опір
електронагрівача.
Із (15.5) і (15.6) масова витрата QMвизначиться як
( )
QM= 0,24 I R kc t2/p∆ . (15.7)
Отже із (15.7) видно, що витрата QMвизначається шляхом
непрямого вимірювання на основі результатів прямих
вимірювань струму I , що проходить по обмотці нагрівача і
перепаду температур ∆t .
-Ультразвуковівитратоміри
Ультразвуковий (частота більше 20кГц) метод вимірювання
витрат грунтується на явищі зміщення звукових коливань
рухомим рідким середовищем.
З двох сторін трубопроводу, по якому рухється вода, під
кутом á встановлено п’єзометричні давачі даного витратоміра
(рис.15.3), які можуть перетворювати електричні імпульси в
акустичні і навпаки.


Рис. 15.3. Структурна схема акустичного витратоміра
Вимірювання швидкості потоку води відбувається
наступним чином.
Електричний імпульс з формувача Ö1надходить до давача
Д1, який перетворює його в акустичний сигнал (механічні
коливання ультразвукової частоти). Даний сигнал проходить
через воду і сприймається давачем Д2через час T1, який
визначиться як
T
=
L
c v1
, (15.8)
де L - відстань між давачами
Д1і Д2; с - швидкість
поширення ультразвукових коливань у воді; v1= v cosá ; v -
швидкість потоку води.
Прийнятий акустичний сигнал перетворюється в
електричний, підсилюється у вимірювально-керуючому блоці
ВКБ і знову через Ö1дадходить до давача Д1. В результаті
цього виникає автоциркуляція імпульсів по контуру, з частотою
F1






 1 c v
1 c v
F = =
1 . (15.9)
T
L
Аналогічно відбувається автоциркуляція імпульсів і по
контуру, показаному пунктирними стрілками. При цьому давач
Д2випромінює, а давач Д1сприймає акустичні імпульси.
Частота F2циркуляції імпульсів в цьому контурі буде
F
=
c v
1 . (15.10)
L
Вимірювально-керуючий блок (ВКБ) керує роботою
контурів і виділяє збільшену в 100 разів різницеву частоту ∆F
F
(
100 F
1 − F2
)
=100v1 . (15.11)
L
При підстановці в (15.11) v1= v cosá і
отримаємо
F 100 sin 2v
L d / siná ,
При á = 450,
∆ =
d
á . (15.12)
Q 4Q
F 100v. (15.13)
d
Оскільки v==
S
(15.13), отримаємо
ð d
, то підставивши значення швидкості в
Q = 0,0025ð d F3. (15.14)
Імпульси частотою ∆F надходять до частотно-аналогового
перетворювача ЧАП з уніфікованим струмовим сигналом
0...5 мА і на електронний лічильник імпульсів ЛІ, який фіксує
кількість води, що проходить через витратомір.
Похибка ультразвукових витратомірів складає близько 2% .
 Тема 16. Лічильники кількості
Тема 16. Лічильники кількості
-Об’ємнілічильники
Об'ємні методи грунтуються на принципі послідовного
додавання порцій досліджуваного потоку рідини чи газу, що
проходить через вимірювальні камери, або на обертанні
чутливого елемента під дією струменя досліджуваного
середовища. Останній різновид об'ємного методу ще
називається тахометричним.
На основі цього будують об'ємні лічильники, зокрема
лічильники з овальними шестернями та ротаційні лічильники,
турбінні (без вимірювальних камер).
Рис. 16.1. Об’ємні лічильники
Лічильникзовальнимишестернями (рис. 16.1 а) має
вимірювальну камеру, в якій знаходяться дві овальні шестерні,
що обкочують одна одну в зустрічних напрямках, оскільки
мають зубчасте зачеплення. Крутний момент, що діє на
шестерні, виникає під дією різниці тисків до та після
вимірювальної камери через овальну форму шестерні. З кожним
обертом шестерень переміщується певний об'єм досліджуваного
середовища. Згадані лічильники - швидкодіючі, дають змогу
вимірювати значні об'ємні витрати. А, враховуючи специфіку
роботи таких витратомірів, можна без особливих ускладнень
формувати вихідні сигнали у вигляді імпульсів, струмових та
частотних параметрів, що можуть бути використані як для
дистанційної передачі вимірювальної інформації, так і в
системах контролю та регулювання витрат у технологічних
установках.
У зв'язку з високою точністю (основна похибка 0,5 %) в
широкому діапазоні вимірюваних витрат, незалежністю показів
від в'язкості досліджуваного середовища, малими витратами
тиску, значним крутним моментом та довговічністю, лічильники
з овальними шестернями широко застосовуються як побутові
витратоміри рідин та газів, а також як первинні перетворювачі в
системах управління та регулювання параметрів технологічних
процесів.
Недоліком таких лічильників є високий рівень акустичного
шуму, чутливість до забруднення досліджуваної речовини, що
зумовлює необхідність її фільтрації.
Основнимиелементамироторноголічильника (рис. 16.1 б) є
два гладкі ротори у формі вісімки, які обкочують один одного в
камері з перерізом неповних кіл. Ротори з'єднані
шестеренчастим редуктором, залитим мастилом, з лічильником
обертів. Оскільки проміжок між поверхнями роторів не
перевищує 0,1 мм, то при обертанні, яке викликане
досліджуваним потоком газу, ротори не торкаються.
Роторні лічильники використовують переважно для
встановлення на магістральних газопроводах та для вимірювань
витрат дорогих газів. Їх застосовування доцільне при низькому
тиску газу та вимогах порівняно високої точності. Похибка, що
не перевищує 1 %, може бути досягнена при врахуванні
реальних параметрів досліджуваного газу (температури, тиску,
вологості) та безперервній корекції показів відповідно до
значення названих параметрів.
У розглянених вище об'ємних лічильниках кожному повороту
чутливого елемента відповідає точно обмежений об'єм
досліджуваного середовища. В лічильниках, які будуть
розглянуті нижче, як чутливий елемент використовується
турбінка з лопатками, яка обертається під дією досліджуваного
потоку, а кількість її обертів пропорційна об'ємним витратам.
 Об'ємні методи вимірювань покладені в основу принципу дії
Об'ємні методи вимірювань покладені в основу принципу дії
так званих роторних лічильників витрат газу типу РЛ-1...РЛ-6 на
експлуатаційний діапазон об'ємних витрат від 0,083/
до
10,03/ . Границі допустимої відносної похибки таких
лічильників в робочому діапазоні вимірювань становлять ±2,5%,
поріг чутливості не перевищує 0,083/ . Ціна поділки
найменшого розряду відлікового пристрою становить 0,02 м3.
-Швидкіснілічильникидлярідин
Турбінні витратоміри (швидкісні лічильники) бувають двох
типів: з аксіальною турбінкою, вісь якої збігається з напрямком
досліджуваного потоку (рис. 16.2 а) і з'єднана передачею з
лічильником обертів, і з вертикальною турбінкою - вісь якої
безпосередньо зв'язана з лічильником обертів (рис. 16.2 б).
Рис. 16.2. Турбінні лічильники
Принцип дії лічильників обох типів оснований на
вимірюванні швидкості обертання турбінки під дією
досліджуваного потоку.
Відомо, що об’ємна витрата Qvрідини зв’язана з середньою
швидкістю vcpрухомого потоку співвідношенням
Qv= v scp, (16.1)
де s - площа поперечного перерізу потоку.
Кількість рідини, яка пройшла через прилад, пропорційна
частоті n обертання турбінки, що знаходиться на шляху потоку.
Рахують, що частота обертання турбінки пропорційна середній
швидкості потоку
n cvcp, (16.2)
де c - коефіцієнт пропорційності, що характеризує
конструктивні властивості приладу.
Враховуючи (16.1), отримаєм
n cQ sv/ . (16.3)
Отже із (16.3) випливає, що частота обертання турбінки
також пропорційна витраті рідини.
Для безперебійної роботи лічильників необхідна відсутність
завихрень у потоці, що надходить на турбінку. Для цього
використовують спеціальні випрямлячі струменя досліджуваної
речовини, виконані у вигляді набору трубок або
взаємоперпендикулярних схрещених пластин і вмонтованих по
перерізу трубопроводу перед турбінкою та після неї.
Турбінні лічильники з механічним лічильним механізмом
застосовують переважно для вимірювання витрат гарячої та
холодної води.
Турбінні лічильники води (крильчасті водоміри) КВ-1,5
призначені для вимірювань питної води (окремі модифікації для
вимірювань витрат гарячої води) мають експлуатаційний
діапазон об'ємних витрат від 0,063/
до 33/
, границі
допустимих похибок в піддіапазонах витрат - в границях від
±2% од ±5%, поріг чутливості не перевищує 0,033/ .
При вимірюванні малих витрат турбінними лічильниками з
механічною передачею вимірювальної інформації виникають
значні похибки, викликані механічним тертям. Ці похибки
значно менші в індуктивних лічильниках турбінного типу.
Одним з різновидів таких лічильників є лічильник з корпусом із
неферомагнітного матеріалу, а в одну з лопаток турбіни
вмонтований постійний магніт. При обертанні турбінки магніт
індукує у вимірювальній обмотці, розміщеній у зовнішній
частині корпусу, імпульси напруги, частота яких пропорційна
кількості обертів турбінки.
В іншому конструктивному варіанті пару чи декілька пар
лопаток і маточину турбінки виготовляють із феромагнітного
матеріалу, а на зовнішній частині корпусу розміщають один чи
декілька сильних магнітів з індукційними котушками. При
обертанні турбінки під дією досліджуваного потоку рідини
змінюється повітряний проміжок магнітного контуру, а отже, і
магнітний потік. Зміна магнітного потоку наводить в обмотках
змінну напругу, частота якої пропорційна кількості обертів
турбінки, а також витратам.
 Змістовний модуль 6. Вимірювання рівня
Змістовний модуль 6. Вимірювання рівня
Вимірювання рівнів при наповненні рідиною різних
резервуарів та баків займає значне місце в різних галузях
промисловості, науки та техніки.
Основними групами рівнемірів є: візуальні (за допомогою
водомірного скла); гідростатичні (в яких рівень визначають за
тиском рідини на дно резервуара з наступним вимірюванням
різниці даного і атмосферного тисків дифманометром);
електромеханічні та механічні, зокрема поплавкові та буйкові;
електричні, в яких рівень перетворюється в зміну електричного
опору (кондуктометричні) або зміну ємності (ємнісні).
-Водомірнескло
Принцип дії водомірного скла для рідин грунтується на
принципі сполучених посудин.
Водомірне скло 1 (рис. 17.1, а) з допомогою арматури
з’єднано з нижньою і верхнею частинами посудини.
Рис. 17.1. Схема встановлення водомірного скла на технологічних
апаратах
Спостерігаючи за положенням меніска рідини в трубі 1,
судять про рівень рідини в посудині. Для виключення
додаткової похибки через різницю температур рідини в
 резервуарі і скляній трубці, перед вимірюванням роблять
резервуарі і скляній трубці, перед вимірюванням роблять
промивку водомірної трубки через вентиль 2.
Через низьку механічну міцність водомірне скло звичайно
використовують довжиною не більше 0,5 м, тому для
вимірювання рівня в великих резервуарах (рис. 17.1 б)
встановлюють кілька водомірних стекол з таким розрахунком,
щоб вони перекривали одне одного.
Водомірне скло застосовується до тиску 2,94 МПа і
температури 3000C .
Абсолютна похибка при вимірюваннях становить (1...2) мм.
-Поплавковірівнеміри
В поплавкових рівнемірах переміщення поплавка (чутливий
елемент), густина якого менша за густину рідини, передається
на показуючий пристрій (рис. 17.2) або перетворювач,
наприклад, реостатний (рис. 17.3) для перетворення
переміщення у вихідний електричний сигнал.
Рис. 17.2. Схема найпростішого поплавкового рівнеміра
Поплавок 1 (рис.17.2) підвішено на гнучкому тросі, який
перекинуто через ролик 2. На протилежному кінці тросу
закріплено вантаж 3 та показчик (стрілку), що показує на шкалі
4 рівень рідини.
Принципову схему поплавкового рівнеміра з реостатним
перетворювачем та логометричним вимірювальним приладом,
як зазначалось, наведено на рис. 17.3.
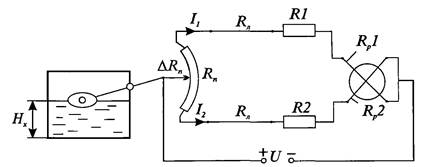
Рис. 17.3. Схема поплавкового рівнеміра з реостатним перетворювачем
Hx - вимірюваний рівень; ∆RП -зміна опору реостатного
перетворювача, повний опір котушки якого становить RП;I1і I2 - струми,
що протікають у колах першої і другої рамки логометра; RЛ -опір
з’єднувальних провідників; R1і R2 - резистори для узгодження параметрів
реостатного перетворювача та логометра; Rp1 і Rp2 -опори рамок
логометра; U - напруга джерела живлення постійного струму
На даній схемі, поплавок розміщено в баку з досліджуваним
рівнем і механічно зв’язаний з повзунком реостатного
перетворювача Rn. Резистори R1і R2служать для узгодження
параметрів перетворювача та логометра для забезпечення
заданого діапазону вимірювань.
При зміні рівня
Hx, а отже відповідного положення
поплавка, повзунок реостатного перетворювача змінюючи
співвідношення опорів у колах рамок логометра змінює в них
співвідношення струмів I1та I2, а тим самим і відхилення на
I
кут á (á = f 1)стрілки, яка показує вимірюваний рівень.
I2
-Поплавковірівнеміризсельсинноюіреостатноюпарою
Системи дистанційного вимірювання рівня води в резервуарі
показано на рис. 17.4.

Рис. 17.4. Поплавковий рівнемір з сельсинною парою:
1 – поплавок; 2 – дротяний тросик; 3 – противага; 4 і 5 – відповідно
сельсин-давач і сельсин-приймач; 6 – зубчастий редуктор; 7 – показчик
Зміни рівня води спричиняють обертання ротора сельсина-
давача 4 (див. тема 4). Ротор сельсина-приймача 5, який
віддалений від резервуара, повертаючись на той же кут á , що і
ротор сельсина-давача 4 á = f H( ) , де H - вимірюваний рівень,
переміщує водночас показчик 7. Це дає змогу прочитати на
шкалі шукане значення рівня води в резервуарі.
Систему дистанційного вимірювання рівня води на основі
поплавкового рівнеміра з реостатною парою показано на
рис.17.5.

Рис. 17.5. Поплавковий рівнемір з реостатною парою:
1 – поплавок; 2 – перетворювач постійної напруги на змінну; 3 –
підсилювач; РД – реверсивний сервоелектродвигун; 4 – показчик
В системі наведеній на рис.17.5 переміщення x поплавка
( x H ) передається на пульт оператора наступним чином.
Внаслідок зміни рівня рідини, потенціали точок C і D (ϕCі
ϕD) відрізняються (у вихідному положенні ϕC= ϕD).
Різницева постійна напруги UCDперетворюється на змінну з
допомогою перетворювача 2, підсилюється підсилювачем 3 й
запускає серводвигун РД, який переміщує повзунок D таким
чином, щоб потенціал точки D (ϕD) відповідав новому
значенню потенціала точки C (ϕC). Іншими словами, щоб
ϕD= ϕC.
Стале положення в цьому випадку ротора серводвигуна (і
стрілки показчика) дає змогу прочитати на шкалі величину рівня
H рідини.
-Поплавковірівнеміризпневматичноюпередачеюпоказів
Рівнемір такого типу наведено на рис. 17.6.
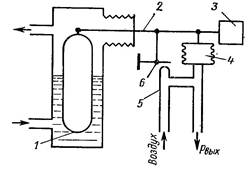
Рис. 17.6. Поплавковий рівнемір з пневматичною передачею показів на
відстань
На даній схемі поплавок 1 підвішено до важеля 2, на кінці
якого знаходиться зрівноважуючий вантаж 3.
Функцію перетворювача виконує система «сопло-заслінка» 5
і 6. Сильфон 4 реалізує зворотній зв’язок.
При збільшенні рівня рідини, поплавок 1 переміститься
вгору, сопло 5 більше перекриється заслінкою 6, в результаті
чого тиск Pвих збільшиться. При зменшенні рівня збільшиться
відстань між соплом і заслінкою в результаті чого Pвих
зменшиться. Отже Pвих функціонально залежить від рівня H
(
( )
Pвих=f H ).
Для рівнемірів з пневматичним вихідним сигналом
застосовують вторинні прилади (манометри) які мають діапазон
вимірювання 0,02-0,1 МПа.
-Буйковірівнеміриісигналізаторирівня
Їх робота грунтується на використанні виштовхувальної сили,
що діє на занурене у рідину тіло (буйок) у вигляді циліндра,
довжина якого значно більша від його діаметра (рис. 17.7), а
питомагустиназначнобільшавідпитомоїгустини
досліджуваноїрідини.

Рис. 17.7. Структура буйкового перетворювача рівня рідини
Буйок механічно з'єднаний з чутливим елементом 2
вторинного перетворювача, а його переміщення обмежується за
допомогою пружини 3, закріпленої одним кінцем до верхньої
частини буйка, а іншим до нерухомої частини перетворювача.
Такий буйок, що вільно підвішений на пружині, є
масштабуючим перетворювачем порівняно великих змін рівня
Hi (до 10...20 м) у порівняно невеликі переміщення буйка x та
чутливого елемента вторинного перетворювача. Залежно від
рівня рідини на буйок буде діяти підйомна сила, внаслідок чого
пружина стискатиметься, а чутливий елемент, яким може бути,
наприклад, плунжер індуктивного чи взаємоіндуктивного
перетворювача, переміщуватиметься, змінюючи відповідно
вихідну індуктивність (повний електричний опір) чи вихідну
ЕРС.
Вторинним вимірювальним приладом рівнемірів з буйковим
перетворювачем (рис.17.8) можуть бути прилади типу КПД чи
КСД (з компенсаційним вимірювальним колом з
диференціально-трансформаторними перетворювачами (див.
тема 4)).

Рис. 17.8. Схема буйкового рівнеміра з диференціально-
трансформаторними перетворювачами:
Hx - вимірюваний рівень; ∆EK - різниця електрорушійних сил
вторинних обмоток обох диференційно-трансформаторних перетворювачів;
U E
− ∆E ; ЕП – електронний підсилювач; РД – реверсивний
K1
K 2
двигун
Останнім часом широко застосовуються буйкові та
поплавкові рівнеміри з силовою компенсацією, а також
статичного зрівноважувального перетворення. Вихідною
величиною в таких вимірювачах є струм. Буйкові рівнеміри
такого типу з уніфікованим вихідним сигналом 0...5 мА та 0…20
мА призначаються для вимірювань рівня рідин в технічних
місткостях з рівнем заповнення до 10... 16 м . Їх зведена похибка
знаходиться в межах до 1,5 %.
Одну з найпростіших систем автоматичної сигналізації рівня
води в резервуарі показано на рис. 17.9.


Рис. 17.9. Схема автоматичної сигналізації рівня води в резервуарі з
буйковим перетворювачем:
1 – буйковий перетворювач; 2 – важіль; 3 – пружина; SQ1 та SQ2 -
контактні перетворювачі; HL1 та HL2 - сигнальні лампи
На даній схемі відхилення рівня рідини від норми примушує
спалахнути відповідну сигнальну лампу. В разі зменшення рівня
– світиться лампа HL1 , а у разі збільшення рівня – відповідно
лампа HL2 .
-Гідростатичнірівнеміри
В цих приладах вимірювання рівня H рідини постійної
густини ñ зводиться до вимірювання тиску p , який створює
стовп цієї рідини
p H gñ , (17.1)
де g - прискорення сили земного тяжіння.
З (17.1)
H
=
p
ñ g
. (17.2)
Існують гідростатичні рівнеміри з неперервним продуванням
повітря чи газу (п’єзометричні рівнеміри) і з безпосереднім
вимірюванням стовпа рідини.
Схему п’єзометричного рівнеміра представлено на рис. 17.10.
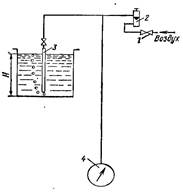

Рис. 17.10. Схема п’єзометричного рівнеміра
На даній схемі стиснене повітря, пройшовши через дросель 1
і ротаметр 2 надходить в п’єзометричну трубку 3, яка
знаходиться в резервуарі.
У випадку, коли тиск повітря, який вимірюється манометром
4 дорівнюватиме тиску вимірюваного стовпа H рідини, з
трубки в рідину почнуть надходити бульбашки повітря. Це є
сигналом про те, що необхідно взяти відлік по шкалі манометра.
Величина цього тиску p підставляється у вираз (17.2), на основі
чого і визначається рівень H .
На рис.17.11 наведено схеми гідростатичних рівнемірів з
безпосереднім вимірюванням стовпа рідини
Рис. 17.11. Схеми гідростатичних рівнемірів з безпосереднім
вимірюванням стовпа рідини:
а) у відкритому резервуарі; б) у резервуарі, що знаходиться під тиском
На рис.17.11,а представлено схему при вимірюванні рівня у
відкритому резервуарі, і встановленні дифманометра нижче дна
резервуара. В цьому випадку, для вимірювання рівня
обов’язково встановлюють зрівнюючу посудину, яка
наповнюється до відповідного (відомого) рівня рідиною, що
знаходиться в резервуарі. Призначенням цієї зрівнюючої
посудини є забезпечення постійного стовпа рідини в одному з
колін дифманометра. Висота стовпа рідини в другому коліні
дифманометра змінюється із зміною рівня в резервуарі. Звідси,
кожному значенню рівня H в резервуарі відповідає певний
перепад тисків ∆p (
∆ =p pi− p2, де p2 - тиск в резервуарі;
p3= const - тиск в зрівноважуючій посудині). Отже кожному
( )
значенню H відповідає своє значення ∆p ( H = f p ).
Зазначене дозволяє по величині вимірюваного перепаду тиску
∆p судити про рівень рідини в резервуарі.
На рис.17.11,б показано схему вимірювання рівня рідини в
резервуарі, що знаходиться під тиском при встановленні
дифманометра нижче дна резервуара. В цьому випадку
зрівноважуюча посудина
встановлюється на висоті
максимального рівня і з’єднується з контрольованим
резервуаром.
 Тема 18. Електричні та радіоізотопні рівнеміри
Тема 18. Електричні та радіоізотопні рівнеміри
В електричних рівнемірах, рівень рідини перетворюється у
відповідний електричний сигнал. Із електричних рівнемірів
найбільш розповсюдженими є ємнісні і омічні.
В ємніснихрівнемірах використовуються діелектричні
властивості контрольованих середовищ, а в омічних –
властивість
контрольованого
середовища
проводити
електричний струм.
-Ємніснийрівнемір
Перетворювачем ємнісного рівнеміра є електричний
конденсатор, ємність якого залежить від рівня рідини.
Перетворювачі ємнісних рівнемірів виготовляють, в
основному, циліндричного і пластинчастого типів (рис.18.1).
Рис. 18.1. Схеми ємнісних перетворювачів рівнемірів:
а) циліндричного; б) пластинчастого
В найпростішому випадку циліндричний ємнісний
перетворювач (рис.18.1 а) виконаний з двох концентрично
розміщених труб, а пластинчастий (рис.18.1 б) з двох
паралельних пластин, між якими знаходиться рідина висотою h .
Ємність перетворювача дорівнює сумі ємностей двох ділянок
Ch - тої, що знаходиться в рідині з діелектричною





 проникливістю å ж і CH h - тої, що знаходиться в повітряному
проникливістю å ж і CH h - тої, що знаходиться в повітряному
середовищі з діелектричною проникливістю åcp (для повітря
å =cp1).
Ємність C (пФ) циліндричного перетворювача дорівнюва-
тиме
å h å ( H h)
C C + C
h H h
= 0, 241
(
ж
)
+ 0, 241
cp
(
)
=
lg /
å + å
(
−
)
lg /
(18.1)
= 0, 241
ж
h
(
cp
H h
)
,
lg /
де h - рівень рідини, що вимірюється (см); D і d - відповідно
внутрішній діаметр зовнішньої обкладки і зовнішній діаметр
внутрішньої обкладки циліндричного конденсатора (см); H -
висота посудини, в якій знаходиться рідина, яка дорівнює
довжині обкладок конденсатора (см).
Ємність C (пФ) пластинчастого плоскопаралельного
ємнісного перетворювача дорівнює
å hb å ( )
H h b
C = 0,088
ж
a
+ 0,088
cp
a
=
(18.2)
=
0,088b
a
å
жh
+ å
cp
(
−
H h
)
,
де a - відстань між пластинами (см); b - ширина пластини
перетворювача (см).
При вимірюванні рівня агресивних але неелектропровідних
рідин, обкладки перетворювача виконують з хімічно стійких
сплавів або покривають вініпластом чи фторопластом. Покриття
обкладок тонкими плівками – ізоляторами, застосовують при
вимірюванні рівня електропровідних рідин.
В якості вторинних вимірювальних приладів в ємнісних
рівнемірах використовуються високочастотні вимірювальні
мости.
Ємнісні рівнеміри випускають класом точності 0,5; 1,0; 2,5.
 Їх мінімальний діапазон вимірювань становить від 0 - 0,4 до
Їх мінімальний діапазон вимірювань становить від 0 - 0,4 до
0-20 м; тиск робочого середовища 2,5 - 10 МПа; температура від
-60 до +1000C та від 100 до 2500C .
-Омічнірівнеміри
Використовують головним чином для сигналізації і
підтримування в заданих межах рівня електропровідних рідин
(кислот, лугів).
Принцип дії омічних сигналізаторів грунтується на замиканні
електричного кола джерела живлення через контрольоване
середовище, яке представляє собою ділянку електричного кола з
відповідним омічним опором. Дані сигналізатори рівня можна
застосовувати для середовищ з провідністю
більше.
2 10−3/
і
Прилад представляє собою електромагнітне реле, що
вмикається в коло між електродом і контрольованим
матеріалом.
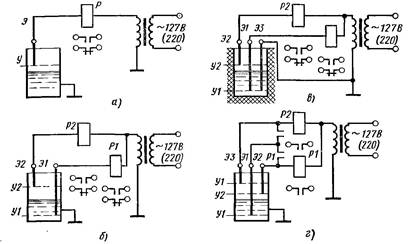
Схеми ввімкнення релейного сигналізатора рівня (рис.18.2)
можуть бути різними.
Читайте також:
- Акустичні рівнеміри
- Виконавчі пристрої. Регулюючі органи. Виконавчі механізми. Гідравлічні виконавчі механізми.
- Гідравлічні в’яжучі речовини.
- Гідравлічні ємкості
- Гідравлічні засоби автоматизації водорозподілу
- Гідравлічні і пневматичні двигуни
- Гідравлічні класифікатори
- ГІДРАВЛІЧНІ МАШИНИ
- Гідравлічні машини
- Гідравлічні системи автоматизації
- Гідравлічні тарани.
- Ємнісні рівнеміри
| <== попередня сторінка | | | наступна сторінка ==> |
| Тема 13. Електричні манометри та вакуумметри | | | Тема 20. Електрохімічні перетворювачі |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |