РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Виконавчі пристрої. Регулюючі органи. Виконавчі механізми. Гідравлічні виконавчі механізми.
ЛЕКЦІЯ №6
ТЕМА: „ВИКОНАВЧІ ПРИСТРОЇ”
Виконавчі пристрої
Дані пристрої призначені для автоматичного або дистанційного керування подачею регулюючого середовища в об'єкт. Складаються вони з регулюючого органа і виконавчого механізму.
Структурна схема виконавчого пристрою з електричним виконавчим механізмом показана на рис. 6.1.

Рис. 6.1. Структурна схема виконавчого пристрою з електричним приводом.
Сигнал хвх з виходу підсилювача або безпосередньо з елемента порівняння надходить на схему керування СК, що забезпечує підключення двигуна М до мережі. Виконавчий двигун М через понижуючий редуктор Р переміщує регулювальний орган РО. Допоміжними елементами пристрою є вимірювальний перетворювач ВП, який використовують для дистанційного контролю положення регулюючого органа або організації зворотного зв'язку в замкнутих системах керування, а також ручний привод РП.
Регулюючі органи
У якості регулюючих органів у системах автоматичного керування застосовують засувки, дискові, клапанні і плоскі затвори, клапани, дросельні заслінки тощо. Основною характеристикою регулюючого органа, що багато в чому визначає надійність і якість роботи системи керування, є видаткова характеристика, що представляє собою залежність витрати регульованого середовища від переміщення регулюючого органа G=f(h).
Якщо регулюючим середовищем є вода, то витрата її через регулюючий орган у виді затвора визначається виразом
 , /6.1/
, /6.1/
де μ — коефіцієнт витрати регулюючого органа; w - площа прохідного перерізу; z - гідравлічний перепад між рівнями води верхнього і нижнього б'єфів.
Для систем автоматичного регулювання бажано, щоб характеристика Q=f(h) була лінійною. Залежність прохідного перерізу від ходу для більшості регулюючих органів лінійна. Тому вираз /6.1/ лінійний при z=const. У дійсності z максимальний при закритому регулюючому органі і знижується в міру його відкриття. Це призводить до того, що тому самому ходу регулюючого органа при різних ступенях відкриття відповідають різні збільшення витрати води.
Порушення пропорційності між переміщенням робочого органа і витратою погіршує роботу систем автоматичного регулювання. Тому прагнуть спрямити витратну характеристику профілюванням прохідного перерізу або введенням між регулюючим органом і виконавчим механізмом проміжної ланки з нелінійною характеристикою - профільного кулачка, куліси, кривошипа й інших нелінійних елементів.
Якщо нелінійність з’єднувальної ланки є дзеркальним відображенням нелінійності регулюючого органа, то витратна характеристика виконавчого пристрою Q=f(h) стає лінійною.
 РО – це пристрій, який сприймає регулюючу дію від ВМ і змінює кількість енергії або речовини на вході об’єкта регулювання. Зміна енергії на виході РО здійснюється за рахунок зміни внутрішніх властивостей РО.
РО – це пристрій, який сприймає регулюючу дію від ВМ і змінює кількість енергії або речовини на вході об’єкта регулювання. Зміна енергії на виході РО здійснюється за рахунок зміни внутрішніх властивостей РО.
У якості регулюючих органів у системах автоматичного керування застосовують засувки, дискові, клапанні і плоскі затвори, клапани, дросельні заслінки тощо. Основною характеристикою регулюючого органа, що багато в чому визначає надійність і якість роботи системи керування, є видаткова характеристика, що представляє собою залежність витрати регульованого середовища від переміщення регулюючого органа Q=f(h). За типом характеристики поділяють (рис. 1.5): 1 – лінійна; 2 – нелінійна; 3 – релейна.
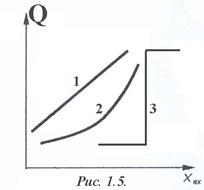 Для систем автоматичного регулювання бажано, щоб характеристика Q=f(h) була лінійною. Порушення пропорційності між переміщенням робочого органа і витратою погіршує роботу систем автоматичного регулювання. Тому прагнуть спрямити витратну характеристику профілюванням прохідного перерізу або введенням між регулюючим органом і виконавчим механізмом проміжної ланки з нелінійною характеристикою - профільного кулачка, куліси, кривошипа й інших нелінійних елементів.
Для систем автоматичного регулювання бажано, щоб характеристика Q=f(h) була лінійною. Порушення пропорційності між переміщенням робочого органа і витратою погіршує роботу систем автоматичного регулювання. Тому прагнуть спрямити витратну характеристику профілюванням прохідного перерізу або введенням між регулюючим органом і виконавчим механізмом проміжної ланки з нелінійною характеристикою - профільного кулачка, куліси, кривошипа й інших нелінійних елементів.
Якщо нелінійність з’єднувальної ланки є дзеркальним відображенням нелінійності регулюючого органа, то витратна характеристика виконавчого пристрою Q=f(h) стає лінійною.
Типи РО.
 Заслінка (рис. 1.6). Для зручності побудови витратних характеристик використовують поняття відносного відкриття РО.
Заслінка (рис. 1.6). Для зручності побудови витратних характеристик використовують поняття відносного відкриття РО.


Відносна пропускна здатність:

Заслінки як РО використовують для газоподібних речовин. Вони не забезпечують нульових значень вихідної величини.
 |
Засувка або клінкер (рис. 1.7). Використовують як для газів так і для рідин.
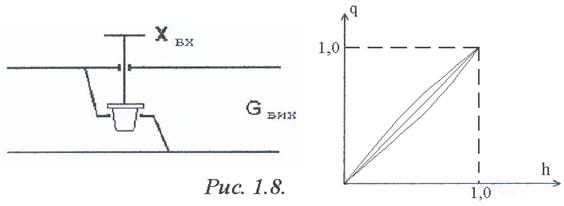 |
Клапан односідловий (рис. 1.8). Клапани можуть забезпечувати як лінійні так і нелінійні витратні характеристики шляхом профілювання клапана. Особливість їх полягає в тому, що на них діють незрівноважені гідравлічні зусилля, що не дозволяє використовувати їх для великих тисків.
 |
Клапан двохсідловий (рис 1.9). На відміну від односідлових, двохсідлові клапани використовуються для необмежених діапазонів тиску.
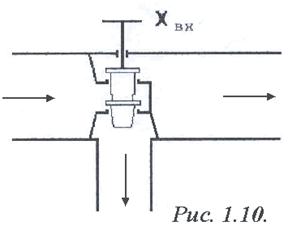
Двохсідловий трьохходовий клапан (рис 1.10).
Основними характеристиками РО є:
1) конструктивна характеристика, яка визначає залежність між відносним відкриттям клапана і вхідною величиною;
2) витратна характеристика; розрізняють внутрішню і робочу;
Внутрішня – це функціональна залежність між відносною витратою і відносним відкриттям.
Робоча - це функціональна залежність відносною витратою і відносним відкриттям з врахуванням умов робочого середовища.
Будова, призначення та характеристики дросельних регулюючих органів.
Регулюючі органи (РО) зміна витрати в яких здійснюється за рахунок зміни опору рухові речовини, називаються дросельнимибо має місце явище дроселювання. Зміна опору в дросельних РО здійснюється шляхом зміни перерізу прохідного отвору. Дросельні РО використовуються для регулювання газів та рідких речовин з невисокою густиною. Для сипучих і в’язких речовин використовуються живильники (шнекові, стрічкові, тарілчасті, вібраційні та інші).
Параметрами дросельних РО є абсолютна витрата Q, м3/год або G, т/год; лінійне відкриття РО h, мм або кутове j, град. Для побудови характеристик використовують відносні одиниці:


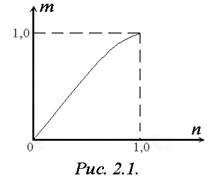
Види характеристик дросельних РО:
1. Відносне відкриття (m) і переміщення (n) РО (рис. 2.1). 
 2. Витратні характеристики (внутрішні і робочі) вказують функціональну залежність між відносною витратою і відносним переміщенням РО. Як відомо, витрата визначається за формулою:
2. Витратні характеристики (внутрішні і робочі) вказують функціональну залежність між відносною витратою і відносним переміщенням РО. Як відомо, витрата визначається за формулою:

де a - коефіцієнт витрати; F – площа перерізу прохідного отвору; e - коефіцієнт розширення речовини;  ; r - густина.
; r - густина.
 Отже, витрата – це функція водночас від площі перерізу отвору і від перепаду тисків.
Отже, витрата – це функція водночас від площі перерізу отвору і від перепаду тисків.
Однією з важливих характеристик РО є коефіцієнт опору:
Коефіцієнт опору визначає втрати енергії на РО. Як приклад розглянемо як змінюється коефіцієнт опору при зміні відносного переміщення (рис. 2.2).
Коефіцієнт опору для різних РО визначається експериментальним шляхом. І саме він визначає витратну характеристику.
 Так як РО встановлюється безпосередньо на вході (на виході) об’єкта регулювання (ОР), то їх слід розглядати як ланку з послідовним з’єднанням елементів (
Так як РО встановлюється безпосередньо на вході (на виході) об’єкта регулювання (ОР), то їх слід розглядати як ланку з послідовним з’єднанням елементів ( ). Характеристика РО не повинна спотворювати характеристику ОР, а інколи може виправляти характеристику ОР.
). Характеристика РО не повинна спотворювати характеристику ОР, а інколи може виправляти характеристику ОР.
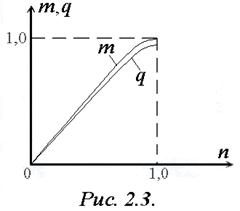
Як приклад розглянемо витратну характеристику засувки (рис 2.3).
Витратна характеристика залежить від опору лінії на якій встановлено РО.
Існують правила узгодження характеристик РО і ОР.
1. Якщо характеристика об’єкта є лінійною, то і характеристика РО теж має бути лінійною.
2. Якщо характеристика об’єкта не лінійна, то характеристика РО повинна бути її дзеркальним відображенням.
3. Якщо об’єкт працює при різних навантаженнях, де має місце перехід з однієї характеристики на іншу, розрахунок характеристики РО виконують на основі графічного інтегрування характеристики об’єкта.
Для вибору регулюючих органів вводять поняття умовна пропускна здатність (УПЗ) (коефіцієнт пропускної здатності), за якою здійснюють вибір РО. УПЗ (познач. С) – це витрата в м3/год для речовин з густиною r=1г/см3 і перепаду тисків DР=0.1МПа (для рідин); С/ - це витрата в м3/год для речовин з густиною r=1кг/м3 і перепаду тисків DР=10Па (для газів). УПЗ відображається в паспорті РО.
По типу витратних характеристик розрізняють: РО з лінійними характеристиками (регулюючі клапани); РО з квадратичними характеристиками (засувки, заслінки); РО з логарифмічними характеристиками (більшість РО).
Виконавчі механізми
Вони призначені для переміщення регулюючих органів відповідно до поступаючих сигналів керування. Основні технічні характеристики виконавчих механізмів - це номінальний обертаючий момент на вихідному валу або номінальне тягове зусилля на вихідному штоці, кут повороту вихідного вала або хід штока, час одного оберта або повного ходу штока і споживана потужність. Крім цих характеристик, для деяких механізмів характерні запізнення, зона нечутливості і вільний вибіг, що негативно впливають на роботу системи автоматичного регулювання.
За видом споживаної енергії виконавчі механізми поділяються на електричні, гідравлічні, пневматичні та інші (вантажні, пружинні тощо).
Електричні виконавчі механізми за принципом дії поділяються на електромагнітні і електродвигунні, а за характером руху вихідного елемента - однообертові, багатообертові і поступального руху.
Електромагнітні механізми випускають двох видів: з котушкою електромагніта, розрахованою на тривале протікання струму, і котушкою електромагніта, розрахованою на короткочасне протікання струму. Електромагнітні виконавчі механізми серій ЕВ-1, ЕВ-2, ВЕМ-1 і інші відносяться до першого виду. При подачі напруги на котушку електромагніта його якір втягується, відкриваючи вентиль або клапан. Якщо напруга з котушки знімається, то якір переміщується під дією пружини, закриваючи регулюючий орган.
Виконавчий механізм серії ЕВ-3 має дві котушки: котушку тягового електромагніта і котушку електромагніта заскочки. При вмиканні вимикача SA1 або замиканні контактів KV1 реле дистанційного керування (рис. 2.33) через випрямляч VD, зібраний за мостовою схемою, одержує живлення котушка тягового електромагніта YA1, якір якої втягується і вентиль відкривається. За 3...4 мм до кінця повного ходу якоря контакт шляхового вимикача SQ4 розриває коло живлення котушки, тягове зусилля падає, але якір продовжує рухатися за інерцією і у крайньому положенні фіксується механічною заскочкою.
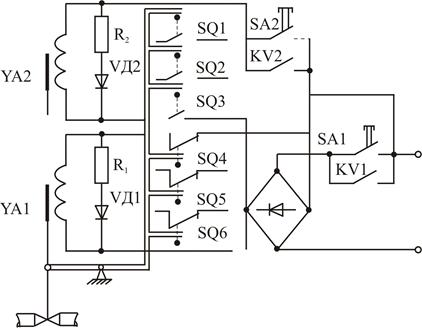
Рис. 3. Принципова електрична схема електромагнітного виконавчого механізму з заскочкою.
Щоб закрити вентиль, вмикають вимикач SA2 або реле дистанційного керування KV2. При цьому котушка електромагніта заскочки YA2 одержує живлення від випрямляча VD за однопівперіодною схемою випрямлення, якір втягується, заскочка звільняє якір тягового електромагніта, який під дією зворотної пружини переміщується у вихідне положення, і вентиль закривається. У цьому положенні замикаючий контакт шляхового вимикача розмикається й електромагніт YA2 відключається. Розмикаючий контакт SQ4 підготовлює коло для повторного включення електромагнітного вентиля. Контакти шляхових вимикачів SQ1, SQ2, SQ5 і SQ6 використовують для керування і сигналізації.
Щоб зменшити іскріння контактів шляхових вимикачів при їх розмиканні, котушки електромагнітів шунтують діодами. Цим створюються електричні кола протікання струму, джерелом якого є накопичена в котушці енергія електромагнітного поля.
Отже, коли вентиль знаходиться у відкритому або закритому стані, його електромагніти відключені, що дозволяє заощаджувати електроенергію. Це дуже важливо при дистанційному керуванні, коли потужність джерел живлення обмежена.
Серед електродвигунних найбільше поширені однообертові виконавчі механізми. Використовують їх для двопозиційного (ДР-М, ДР-1М), і пропорційного (ПР-М і ПР-1М) регулювання, а також для керування такими регулюючими органами як дискові затвори, заслінки, крани тощо. Промисловість випускає механізми з вихідним пристроєм у виді диска і кривошипа для з’єднання з регулюючим органом. Основні технічні характеристики деяких виконавчих механізмів наведені в табл. 1.1.
Таблиця 1.1
Основні технічні характеристики однообертових виконавчих механізмів
| Тип | Ном. момент на вихід. валу, Нм | Час одного оберту вихід. вала, с | Макс. кут повороту вихід. вала, град | Напруга живлення, В | Спож. пот., ВА |
| ДР-М | 9,8 | ||||
| ПР-М | 9,8 | ||||
| МЕО-0,25 | 2,45 | ||||
| МЕО-0,63 | 5,57 | ||||
| МЕО-1,6/40 | 15,78 | ||||
| МЕО-4/100 | 39,2 | ||||
| МЕО-10/40-68 | |||||
| МЕО-25/100 | 90; 140 | ||||
| МЕО-63/40-68 | |||||
| МЕО-160/100-68 | |||||
| МЕО-400/250 | |||||
| Прмітка. Поступальний рух штока механізма ДР-М складає 19 мм, а ПР-М – 20 мм. Повний хід прямоходової приставки механізма МЕО-0,25 складає 28 мм. |
На закритих зрошувальних системах у якості трубопровідної, арматури усе більш широко застосовують поворотні дискові затвори, тому що вони конструктивно простіші засувок, мають велику пропускну здатність і забезпечують необхідну герметичність. На рис. 4 показані дисковий затвор і з’єднання його з виконавчим механізмом типу МЕО.
У залежності від величини обертового моменту на вихідному валу або тягового зусилля на штоці в якорі двигунів виконавчих механізмів використовують двофазні конденсаторні двигуни з порожнистим ротором і трифазні асинхронні двигуни з короткозамкненим ротором. Для зменшення вибігу вихідного вала механізму після відключення двигуна з короткозамкнутим ротором застосовують електромагнітне гальмо.
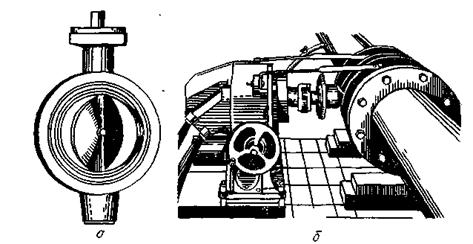
Рис. 4. Поворотний дисковий затвор (а) і з’єднання його з виконавчим механізмом МЕО (б).
 Схеми керування двигунами випускають контактними і безконтактними. Останні побудовані на основі тирнсторів або транзисторів.
Схеми керування двигунами випускають контактними і безконтактними. Останні побудовані на основі тирнсторів або транзисторів.
 На рис. 5 показана схема керування виконавчим механізмом типу МЕО з двома індуктивними перетворювачами, що призначені для здійснення зворотного зв’язку за положенням регулюючого органа і дистанційного виміру кута повороту або переміщення штока. Деякі виконавчі механізми випускають з реостатними вимірювальними перетворювачами.
На рис. 5 показана схема керування виконавчим механізмом типу МЕО з двома індуктивними перетворювачами, що призначені для здійснення зворотного зв’язку за положенням регулюючого органа і дистанційного виміру кута повороту або переміщення штока. Деякі виконавчі механізми випускають з реостатними вимірювальними перетворювачами.
Двигун М вмикається на відкриття регулюючого органа вимикачем SA1 або контактами KV1 реле дистанційного керування. При цьому обмотка 1 двофазного двигуна під’єднується безпосередньо до мережі, а обмотка 2 - через конденсатор С, який створює зсув за фазою струмів, що протікають в цих обмотках. Двигун через редуктор повертає вихідний вал, з яким зв'язаний валик блока перетворювачів. На цьому валику закріплені профільний кулачок, що переміщує осердя індуктивних перетворювачів ІП1 і ІП2, і чотири кулачки, що діють на шляхові вимикачі SQ1—SQ4.
При повороті регулюючого органа на заданий кут контакти вимикачів SQ1 і SQ3 розмикаються, двигун відмикається від мережі і гасне сигнальна лампочка HL1. Одночасно замикаються контакти SQ2 і SQ4. Контакт SQ2 підготовляє коло реверсування двигуна, a SQ4 включає лампочку HL2, що сигналізує про відкриття регулюючого органа.
При включенні вимикача SA2 або при замиканні контактів KV2 двигун вмикається на закриття регулюючого органа й у вихідному стані відключається контактами SQ2.
Для дистанційного керування засувками, плоскими затворами й іншими регулюючими органами застосовують багатообертові виконавчі механізми. Зокрема, на автоматизованих меліоративних помпових станціях використовують електрофіковані засувки з електроприводами різних типів, що відрізняються друг величиною обертового моменту, конструкцією редуктора, способом обмеження максимального моменту і конструктивними особливостями.
За способом захисту регулюючих органів від поломок при заїданні рухомих частин і забезпечення необхідної щільності закриття розрізняють електроприводи з муфтою обмеження обертового моменту і з реле максимального струму. Муфта налаштовується на спрацювання в межах від 50 до 100% максимального обертового моменту. У випадку перевищення обертовим моментом встановленого значення муфта діє на шляховий вимикач, який через магнітний пускач відмикає електродвигуна від мережі. Промисловість випускає електроприводи з однобічною муфтою, що спрацьовує тільки при роботі привода у бік закривання, і з двосторонньою муфтою, що спрацьовує як при закриванні, так і при відкриванні регулюючого органа.
Обмеження обертового моменту за допомогою реле максимального струму відбувається у такий спосіб. В одну із фаз статорної обмотки асинхронного двигуна вмикається реле максимального струму. При зростанні моменту на валу двигуна струм статора збільшується, реле спрацьовує і своїм розмикаючим контактом впливає на схему відключення двигуна від мережі. Використання реле максимального струму спрощує конструкцію привода, однак схема керування небагато ускладнюється, тому що при пуску двигуна контакти реле максимального струму необхідно шунтувати контактами реле часу. У протилежному випадку від пускового струму спрацює реле максимального струму і двигун відключиться від мережі, тобто пуск двигуна стане неможливим.
Таблиця 2.
| Тип піднімача | Тягове зусилля, кН | Дотискуюче зусилля, кН | Напір, м | Потужність електродвигуна, кВт | Тривалість підйому на 1 м., хв |
| 1 ЕГ | 2,93 | 0,4 | |||
| 2,5 ЕГ | 3,65 | 0,6 | |||
| 5 ЕГ | 3,65 | 1,0 | |||
| 10 ЕГ | 4,9 | 1,3 | |||
| 20 ЕГ | 5,5 | 2,0 |
Багатообертові виконавчі механізми використовують також в якості привода плоских затворів. Для цієї мети випускають одно- і двогвинтові піднімачі типу Г-73 з асинхронними короткозамкнутими двигунами.
Тяговим органом піднімача є гвинт, нижній кінець якого з'єднаний із затвором, а верхній – угвинчений в гайку. При обертанні гайки гвинт і зв'язаний з ним затвор рухаються поступально. Конструкція передбачає ручне керування затвором за допомогою рукоятки.
Для обмеження тягового зусилля використовують реле максимального струму. Вимірювальні перетворювачі, зв'язані механічно з гвинтом, забезпечують місцевий контроль за положенням затвора і дистанційне вимірювання.
Основні технічні характеристики деяких одногвинтових піднімачів наведені в табл. 2.
В якості електропривода піднімачів використовують асинхронні короткозамкнуті двигуни, керування якими здійснюється за допомогою шаф автоматизованого привода типу ШАП-5501 і ШАП-5502.
Для дистанційного керування засувками, плоскими затворами й іншими регулюючими органами застосовують багатообертові виконавчі механізми. Зокрема, на автоматизованих меліоративних насосних станціях використовують електрофіковані засувки з електроприводами різних типів, що відрізняються друг величиною обертового моменту, конструкцією редуктора, способом обмеження максимального моменту і конструктивними особливостями.
 Структурна схема МЕБ (рис. 3).
Структурна схема МЕБ (рис. 3).
1 – АД; 2 – фрекційна муфта; 3 – мікро перемикачі обмеження моменту – вимикають двигун у випадку перевищення моменту; 4 – редуктор зубчатий; 5 – ручний привід; 6 – здавачі положення; 7 – мікро перемикачі для блокування АД; 8 – вал з гвинтовою різьбою; 9 – гвинтова муфта.
За способом захисту регулюючих органів від поломок при заїданні рухомих частин і забезпечення необхідної щільності закриття розрізняють електроприводи з муфтою обмеження крутного моменту і з реле максимального струму. У випадку перевищення обертовим моментом встановленого значення муфта діє на шляховий вимикач, який через магнітний пускач відмикає електродвигуна від мережі. Промисловість випускає електроприводи з однобічною муфтою, що спрацьовує тільки при роботі привода у бік закривання, і з двосторонньою муфтою, що спрацьовує як при закриванні, так і при відкриванні регулюючого органа.
Багатообертові виконавчі механізми використовують також в якості привода плоских затворів. Для цієї мети випускають одно- і двогвинтові піднімачі типу Г-73 з асинхронними короткозамкнутими двигунами.
Тяговим органом підпіднімача є гвинт, нижній кінець якого з'єднаний із затвором, а верхній угвинчений в гайку. При обертанні гайки гвинт і зв'язаний з ним затвор рухаються поступально. Конструкція передбачає ручне керування затвором за допомогою рукоятки.
Гідравлічні виконавчі механізми
Ці механізми все частіше застосовують при автоматизації меліоративних систем із-за простоти конструкції і використання енергії напору води для переміщення регулюючого органа. За конструктивним виконанням їх поділяють на поршневі, мембранні і клапанні. Керування ними може здійснюватися за допомогою електричних або гідравлічних сигналів.
 Гідравлічні виконавчі механізми застосовують для привода плоских затворів на великі зусилля, засувок і іншої запірної арматури.
Гідравлічні виконавчі механізми застосовують для привода плоских затворів на великі зусилля, засувок і іншої запірної арматури.
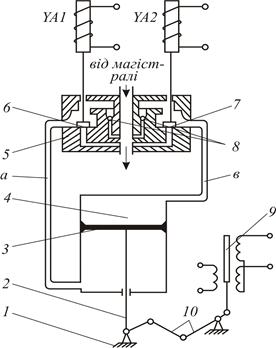
Найбільше розповсюджений електрогідрокерований виконавчий механізм складається з гідравлічного серводвигуна і блока електрогідравлічних реле (рис. 6).
 При відключених електромагнітах YA1 і YA2 клапани 6 і 7 знаходяться у нижньому положенні. При цьому вода з магістралі через зворотні клапани 8 подається в обидві порожнини циліндра 4, і поршень 3 нерухомий. При подачі напруги, наприклад, на котушку електромагніта YA1 осердя і зв'язаний з ним клапан 6 стрибком переміщуються з нижнього положення у верхнє. Нижня порожнина циліндра через канал а з'єднується зі зливом. У результаті на поршень діє сила тиску
При відключених електромагнітах YA1 і YA2 клапани 6 і 7 знаходяться у нижньому положенні. При цьому вода з магістралі через зворотні клапани 8 подається в обидві порожнини циліндра 4, і поршень 3 нерухомий. При подачі напруги, наприклад, на котушку електромагніта YA1 осердя і зв'язаний з ним клапан 6 стрибком переміщуються з нижнього положення у верхнє. Нижня порожнина циліндра через канал а з'єднується зі зливом. У результаті на поршень діє сила тиску  , де w - площа поршня. Під дією цієї сили поршень і зв'язаний з ним через шток 2 регулюючий орган 1 переміщується вниз. Переміщення відбувається доти, поки включений електромагніт. При відключенні електромагніта клапан 6 опускається вниз, канал а з'єднується з магістраллю і рух поршня припиняється.
, де w - площа поршня. Під дією цієї сили поршень і зв'язаний з ним через шток 2 регулюючий орган 1 переміщується вниз. Переміщення відбувається доти, поки включений електромагніт. При відключенні електромагніта клапан 6 опускається вниз, канал а з'єднується з магістраллю і рух поршня припиняється.
При подачі напруги на котушку електромагніта YA2 поршень переміщується вгору, тому що верхня порожнина циліндра з'єднується через канал b зі зливом. Зворотні клапани 5 запобігають переміщенню поршня під дією сили з боку регулюючого органа.
Для контролю положення регулюючого органа використовується диференційно-трансформаторний перетворювач 9, з'єднаний зі штоком за допомогою важелів 10.
Клапанні виконавчі механізми використовують у гідравлічних системах керування. Вони мають програмні пристрої, що реагують на імпульси зниження тиску.
Мембранні виконавчі механізми застосовують, в основному, у гідравлічних регуляторах.
Читайте також:
- Акумуляторні батареї та зарядні пристрої.
- Асинхронні виконавчі двигуни і тахогенератори
- Виконавчі органи влади на місцях
- Гідравлічні в’яжучі речовини.
- Гідравлічні ємкості
- Гідравлічні засоби автоматизації водорозподілу
- Гідравлічні і пневматичні двигуни
- Гідравлічні класифікатори
- Гідравлічні машини
- ГІДРАВЛІЧНІ МАШИНИ
- Гідравлічні системи автоматизації
| <== попередня сторінка | | | наступна сторінка ==> |
| Теоретична соціологія | | | Гідравлічні і пневматичні двигуни |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |