РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Закони динаміки.
Динаміка
Лекція 1. Вихідні положення динаміки
ПЛАН лекції
1. Предмет і основні поняття динаміки.
2. Закони динаміки.
3. Диференціальні рівняння руху матеріальної точки.
Предмет і основні поняття динаміки.
Динаміка – це розділ теоретичної механіки, який вивчає рухи матеріальних об’єктів з урахуванням сил, що діють на ці об’єкти.
На відміну від кінематики, в динаміці при вивченні руху враховують інертність (масу) рухомого об’єкта, а також сили, які діють на нього під час руху.
На відміну від статики, в динаміці сили розглядають не тільки сталі, а й такі, що можуть змінюватися (з плином часу, або зі зміною положення точки прикладання сили, або зі зміною швидкості руху).
Розглянемо основні поняття динаміки.
Матеріальна точка – це точка, наділена масою, яка моделює тверде тіло, якщо його розмірами можна знехтувати в умовах поставленої задачі.
Маса – це міра інертності. В класичній механіці масу вважають скалярною величиною, одиницею вимірювання якої є кілограм.
Інертність – це властивість матеріального об’єкта зберігати свій рух (або стан спокою) при відсутності діючих сил. Якщо на тіло починає діяти сила, то це тіло змінює свій рух поступово й тим повільніше, чим більш інертним є тіло.
Ізольована точка – це матеріальна точка, на яку не діють сили або діє зрівноважена система сил.
Закони динаміки.
В основі динаміки лежать закони Ісаака Ньютона, викладені ним в
| «Математичних началах натуральної філософії». Закони Ньютона є об’єктивними законами природи, встановленими на основі численних дослідів і спостережень Ньютона і його попередників. Ці закони істинні настільки, наскільки висновки, що випливають із них, узгоджуються з досвідом у межах точності спостережень. Вони носять обмежений характер і є лише першим наближенням до дійсності, добре узгоджується з нею лише при рухах із малими швидкостями. | 
|
Перший закон Ньютона (закон інерції): Ізольована матеріальна точка зберігає стан спокою або рівномірного і прямолінійного руху відносно певно системи відліку.
Зауваження:
1. Рівномірний і прямолінійний рух називають рухом за інерцією.
2. Систему відліку, відносно якої рух точки відбувається за законом інерції, називають інерціальною.
Перший закон Ньютона є узагальненням принципу інерції Галілея.
Другий закон Ньютона (основний закон динаміки): Сила, прикладена до матеріальної точки, надає цій точці прискорення, яке має напрямок сили і задовольняє умову
 (якщо
(якщо  = const).
= const).
Тут  – сила, яка діє на матеріальну точку, – маса цієї точки,
– сила, яка діє на матеріальну точку, – маса цієї точки,
 – прискорення точки.
– прискорення точки.
Зауваження:
1. Якщо на матеріальну точку діють декілька сил, то  – рівнодійна всіх цих сил.
– рівнодійна всіх цих сил.
2. У загальному випадку (коли маса т не обов’язково є сталою величиною) формула, що виражає другий закон, має вигляд
 ,
,
де  – швидкість точки.
– швидкість точки.
Третій закон Ньютона (про дію та протидію): Сили взаємодії двох
матеріальних точок однакові за модулем і протилежно направлені вздовж прямої, що з’єднує ці точки.
На рисунку показана геометрична ілюстрація цього закону. Маємо дві матеріальні точки, маси яких  і і  . Якщо перша точка починає діяти на другу із силою . Якщо перша точка починає діяти на другу із силою  , то обов’язково виникає протидія, тобто друга точка буде діяти на першу із силою , то обов’язково виникає протидія, тобто друга точка буде діяти на першу із силою  . .
| 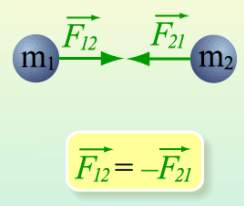 Тут – «дія», – «протидія»
Тут – «дія», – «протидія»
|
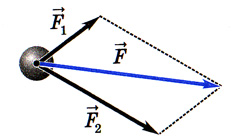
Четвертий закон(про незалежність дії сили): Прискорення, якого набуває матеріальна точка під дією сили, не залежить від того, чи діє на цю точку інша сила.
Для випадків, коли на матеріальну точку діють декілька сил, четвертий закон динаміки дає можливість розв’язувати задачу одним із двох способів:
а) знайти рівнодійну прикладених до точки сил як векторну суму цих сил , а потім за вектором  визначити прискорення точки; визначити прискорення точки;
| 
|
б) знайти прискорення  , що відповідають кожній із сил
, що відповідають кожній із сил  , а потім урахувати, що повне прискорення заданої точки дорівнює векторній сумі знайдених прискорень
, а потім урахувати, що повне прискорення заданої точки дорівнює векторній сумі знайдених прискорень  .
.
Читайте також:
- IV. Закони ідеальних газів.
- А) Грошовий обіг. Закони.
- Аграрні закони України
- Аналітичні показники рядів динаміки.
- Аналітичні показники ряду динаміки.
- Аналітичні показники ряду динаміки.
- База управлінських рішень і закони організації.
- Булеві теореми та закони
- В процесі читання виділіть маркером або підкресліть найважливіші, на вашу думку, екологічні закони.
- В) економічні категорії і закони.
- Види, типи і форми професійного спілкування. Основні закони спілкування. Стратегії спілкування.
- Визначення в рядах внутрішньорічної динаміки.
| <== попередня сторінка | | | наступна сторінка ==> |
| | | Диференціальні рівняння руху матеріальної точки |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |