РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Поплавкові рівнеміри
Це найбільше розповсюджені прилади для вимірювання рівня у відкритих каналах, басейнах і закритих резервуарах. Вимірювальним перетворювачем у них є поплавок, переміщення якого перетворюється у фізичну величину, зручну для спостереження, реєстрації і керування.
Для автоматичної реєстрації рівня води протягом доби в польових умовах застосовують самописний прилад «Валдай», кінематична схема якого наведена на рис. 12.2. Поплавок 1 і противага 2 підвішуються на одному з поплавкових коліс 3 або 4 з довжинами кіл відповідно 300 і 600 мм. Поплавкові колеса через шестерні 14 і 13 обертають барабан 12, на якому закріплений діаграмний папір. Перо 11 кріпиться на каретці 7, що ковзає по направляючим 9, паралельним осі барабана. Каретку переміщує тросик 8, на одному кінці якого знаходиться вантаж 10, а другий кінець намотаний на барабан 6, зв'язаний з годинниковим механізмом 5.

Рис. 12.2 Кінематична схема самописного рівнеміра «Валдай».
Годинниковий механізм і вантаж забезпечують рівномірний рух каретки з пером, яке креслить на діаграмному папері графік зміни рівня води в часі. Використовуючи два поплавкові колеса і змінні шестерні 13, 14, можна записувати зміну рівня в масштабах 1:1, 1:2, 1:5 і 1:10. Час запису обмежений ходом каретки і за рахунок зміни діаметра барабана може дорівнювати 12 або 24 год. Похибка запису рівня при масштабі 1:1 складає ±3 мм. Зі збільшенням масштабу похибка зростає.
Для автоматичної реєстрації зміни рівня води протягом 38 діб застосовують самописний прилад ГР-38. Він відрізняється від приладу «Валдай» тим, що годинниковий механізм приводить у рух барабан з діаграмним папером, а каретка з пером переміщується під дією поплавка. Обидва прилади дозволяють реєструвати зміни рівня води в резервуарах і відкритих руслах у діапазоні 0...6 м.
Для безперервного дистанційного вимірювання рівня в діапазоні 0...20 м застосовують рівнемір, що складається з сельсина-давача СД й сельсина-приймача СП, зв'язаних між собою лінією зв'язку (рис. 12.3).
В давачу поплавок 1 за допомогою троса зв'язаний з барабаном 2, один оберт якого відповідає зміні рівня на 0,5 м. Обертання барабана через вал 3 передається на ротор сельсина-давача 4 і на лічильник-покажчик місцевого відліку 6. Система зрівноважена противагою 7, яка зв'язана тросом з барабаном 5, закріпленим на валу 3.

Рис. 12.3. Кінематична й електрична схеми рівнеміра з дистанційною передачею показів.
Приймач складається із сельсина-приймача 8, ротор якого через кінематичну схему зв'язаний з лічильником-покажчиком рівня 10 і кулачками 9. Кулачки впливають на шляхові перемикачі, контакти яких використовують для сигналізації дискретних значень рівня.
Дистанційна передача переміщення поплавка здійснюється сельсинами, що працюють у режимі синхронного зв'язку. Сельсини являють собою індукційні електричні машини невеликої потужності з двома обмотками: однофазною обмоткою збудження, розташованою на статорі, і трифазною синхронізуючою обмоткою, розташованою на роторі. Обмотки збудження живляться напругою 110 В частотою 50 Гц від одного джерела. При однаковому положенні обмоток роторів обох сельсинів щодо обмоток збудження індуковані у них е.р.с. рівні за амплітудами й однакові за фазами. Тому що трифазні обмотки з'єднані зустрічно, то струм у їх колі не протікає.
При зміні рівня ротор сельсина-давача повертається, що призводить до зміни фази е.р.с. його обмотки. Внаслідок цього в трифазному колі виникає зрівняльний струм, магнітний потік якого, взаємодіючи з магнітним потоком обмотки збудження, створює обертаючий момент, який повертає ротор сельсина-приймача. Коли кут повороту ротора сельсина-приймача відповідатиме кутові повороту ротора сельсина-давача, фази е.р.с. роторних обмоток стають рівними, зрівняльного струму не буде і рух ротора сельсина-приймача припиниться. При безперервному обертанні сельсина-вага синхронно з ним обертатиметься сельсин-приймач.
Основна похибка дистанційного вимірювання рівня дорівнює 0,01 м. Віддаль між давачем і приймачем залежить від опору з’єднуючих проводів, що не повинен перевищувати 30 Ом. Для мідних проводів перетином 2,5 мм2 ця віддаль складає 6 км.
Як вимірювальні пристрої в системах автоматичного регулювання і дистанційного контролю застосовуються поплавкові давачі рівня типу ДР, що відрізняються лише убудованим перетворювачем. Давач ДРП має потенціометричний перетворювач, ДРЧ – частотний і ДРК – кодовий.
Кінематична схема цих рівнемірів наведена на рис. 12.4. До барабана 2 за допомогою троса кріпиться поплавок 1, а до барабана 7 – противага 8. Барабани зв'язані валом 3. Обертання вала через шестеренні передачі передається на потенціометричний, частотний або кодовий перетворювач 4, кулачки 5, що діють на перемикаючі контакти граничних значень рівня води 6, і цифровий покажчик місцевого відліку 9.
Технічні характеристики давачів з різними перетворювачами однакові: межі вимірювання 0...10 м; основні похибки за місцевим
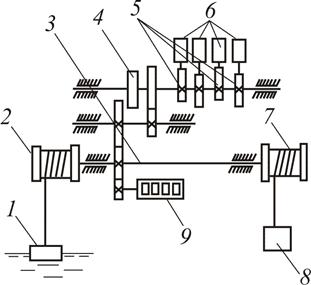
Рис. 12.4. Кінематична схема поплавкових рівнемірів.
лічильником ±10 мм, замикання електричних контактів ±20 мм. Похибка перетворення рівня води в електричний сигнал залежить від меж вимірювання і виду перетворювача. Для кодового перетворювача вона складає ±1%, для частотного – ±1,5% і для потенціометричного – ±2,5% при діапазоні вимірювання 0...1,25 м. Зі збільшенням діапазону похибка вимірювання збільшується. Щоб її зменшити, необхідно діапазон вимірів розбити на піддіапазони і переключення робити при переміщенні поплавка.
Для дистанційного переміщення поплавка в необхідний піддіапазон вимірювань застосовують комплекси електромеханічних засобів (КЕМЗ), що мають електричний вихідний сигнал і керуються пристроями телемеханіки. На рис. 12.5 наведена кінематична схема КЕМЗ, яку використовують для вимірювання рівня води у каналах.
Для переміщення поплавка в задану зону контролю від пристрою телемеханіки поступає команда на «керування вверх» або на «керування вниз». При цьому включається двигун М і поплавок переміщується в задане положення. Переміщення поплавка контролюється по кількості імпульсів, що формуються перетворювачем „кут-код” КП і потім передаються на пристрій телемеханіки. Один імпульс відповідає переміщенню поплавка на 8 мм.
Перетворення кута повороту двигуна в послідовність імпульсів здійснюється за допомогою перфорованого диска із феритової сталі. При обертанні диска відбувається зміна стану магнітопровода і за рахунок цього відбувається формування імпульсів. При відключеному двигуні переміщення поплавка призводить до переміщення постійного магніту уздовж установлених через 16 мм на рейці магнітодіодів.
У випадку надходження команди на вимірювання починається опитування перетворювача лінійного переміщення ПЛП імпульсами частотою 1 кГц. При опитуванні магнітодіодів формується послідовність імпульсів, що утворює вихідний код, який передається через пристрій телемеханіки. Закінчується передача у момент опитування збудженого полем постійного магніту магнітодіода. Положення магніту пропорційно вимірюваному рівневі води. Зона вимірів задається положенням шляхових вимикачів SQ1 і SQ2. При виході поплавка з заданої зони постійний магніт у перетворювачі ПЛП, знаходячись в одному з крайніх положень, діє на вимикач і в
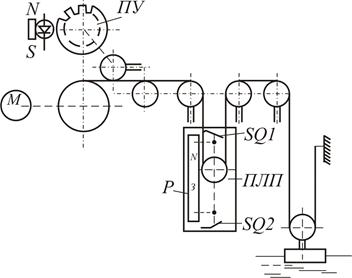
Рис. 12.5. Кінематична схема телемеханічного комплексу вимірювання рівня КЕМЗ-2.
пристрій телемеханіки посилається сигнал, що використовується для зміни зони вимірювання.
Комплекси електричних засобів випускаються також для вимірювання рівня води у свердловинах (КЕМЗ-1), для вимірювання перепаду рівнів води у відкритих водоводах (КЕМЗ-3), для сигналізації рівня води в каналах і формування пневматичного (КЕМЗ-4) і дискретного електричного (КЕМЗ-5) сигналів керування. Усі вони мають телемеханічну установку зони вимірювання, здійснюють перетворення переміщення поплавка в число-імпульсний код і їх можна застосовувати в дискретних системах автоматичного регулювання як вимірювальні пристрої.
Читайте також:
- Акустичні рівнеміри
- Ємнісні рівнеміри
- Пневмометричні рівнеміри
- Поплавкові рівнеміри.
- Рівнеміри ємнісні
- Тема 17. Поплавкові і гідравлічні рівнеміри
| <== попередня сторінка | | | наступна сторінка ==> |
| Передаточна функція ділянки каналу як об’єкта регулювання | | | Ємнісні рівнеміри |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |