РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Передаточна функція ділянки каналу як об’єкта регулювання
Автоматичне керування водорозподілом у загальному випадку охоплює автоматичне регулювання режиму каналу, автоматичне керування водовипускними спорудами й автоматичний захист каналів. Сукупність взаємозалежних систем, які виконують вказані функції, утворюють автоматизовану систему керування технологічним процесом (АСКТП) водорозподілення.
Об'єктом керування в АСКТП є наповнений водою канал, який для підвищення керованості за допомогою перегороджуючих споруд розділяють на ряд ділянок (б'єфів). Регулювання рівнів у б'єфах здійснюють автономні системи керування.
Як уже відзначалося, для розрахунку автоматичних систем необхідно мати математичну модель об'єкта. Як типовий об'єкт можна прийняти ділянку каналу, обмежену двома перегороджуючими спорудами (рис. 12.1).
Глибина наповнення  і середня швидкість течії
і середня швидкість течії  у будь-якому створі б'єфа при зміні граничних умов (зміна положення затворів перегороджуючих споруд або рівнів води поза б'єфом) описуються рівняннями Сен-Венана
у будь-якому створі б'єфа при зміні граничних умов (зміна положення затворів перегороджуючих споруд або рівнів води поза б'єфом) описуються рівняннями Сен-Венана
 , 12/.1/
, 12/.1/
де Q і  – відповідно витрата і живий перетин води в досліджуваному створі; s – віддаль від розглянутого створу до нижньї перегороджуючої споруди;
– відповідно витрата і живий перетин води в досліджуваному створі; s – віддаль від розглянутого створу до нижньї перегороджуючої споруди;  – ухил дна каналу; R – гідравлічний радіус; С – коефіцієнт Шези.
– ухил дна каналу; R – гідравлічний радіус; С – коефіцієнт Шези.
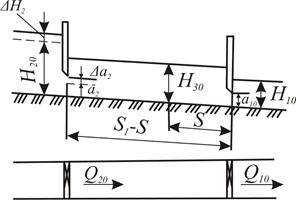
Рис. 12.1. Схема ділянки каналу, прийнятого як типовий об'єкт регулювання.
Рівняння /12.1/ нелінійні і рішити їх у загальному виді не можна. Тому їх слід лініаризувати. Лінеаризація базується на класичній теорії хвиль малої амплітуди, відповідно до якої зміни гідравлічних параметрів при хвильовому русі води величини малі, квадратами і добутками яких можна знехтувати. Виходячи з цього можна записати, що  ;
;  ;
;  ;
; ;
;  , де індексом 0 позначені значення змінних при t=0.
, де індексом 0 позначені значення змінних при t=0.
Підставивши нові змінні в рівняння /12.1/ і врахувавши, що  і
і  , одержимо лініаризовані рівняння, які описують несталий рух води у виді
, одержимо лініаризовані рівняння, які описують несталий рух води у виді
 ,
,
/12.2/

де В – ширина потоку поверху;  – коефіцієнт шорсткості;
– коефіцієнт шорсткості;  – змочений параметр русла каналу;
– змочений параметр русла каналу;  – коефіцієнт відкосу;
– коефіцієнт відкосу;  .
.
Рішення рівняння /12.2/ залежить від граничних умов, які визначають амплітуди як прямих, так і відбитих хвиль. Е.Е.Маковський одержав рішення рівнянь /12.2/ в операторній формі  при зміні витрат у верхньому і нижньому створах. Щоб знайти рівняння, яке описує несталий рух води у б’єфі необхідно знайти оригінал
при зміні витрат у верхньому і нижньому створах. Щоб знайти рівняння, яке описує несталий рух води у б’єфі необхідно знайти оригінал  за зображенням , що представляє значні математичні труднощі. Залежності навіть для окремих випадків мають в собі нескінченні ряди, що не дозволяє використовувати їх для розрахунків систем автоматичного регулювання. Тому залежність замінюють наближеною залежністю
за зображенням , що представляє значні математичні труднощі. Залежності навіть для окремих випадків мають в собі нескінченні ряди, що не дозволяє використовувати їх для розрахунків систем автоматичного регулювання. Тому залежність замінюють наближеною залежністю  , виходячи із наступних умов: залежності і повинні мати однакові первинні амплітуди хвиль, однакові статичні похибки і площі, обмежені кривими та і віссю абсцис, повинні бути також однаковими.
, виходячи із наступних умов: залежності і повинні мати однакові первинні амплітуди хвиль, однакові статичні похибки і площі, обмежені кривими та і віссю абсцис, повинні бути також однаковими.
Перехідний процес у б'єфі значної довжини  при одночасному переміщенні затвора на
при одночасному переміщенні затвора на  і зміні рівня на
і зміні рівня на  описується рівнянням
описується рівнянням
 , /12.3/
, /12.3/
де  – величини, зазначені на рис. 12.1;
– величини, зазначені на рис. 12.1;











Рівняння /12.3/ показує, що рівень води у будь-якому створі довгого б’єфа змінюється за експонентним законом з запізненням. При цьому коефіцієнт підсилення, постійна часу та запізнення залежать від положення досліджуваного створу відносно нижньої перегороджуючої споруди і початкової швидкості руху води. Рівнянню /12.3/ відповідає передаточна функція інерційної ланки з запізненням.
У б'єфах невеликої довжини необхідно враховувати вплив відбитих хвиль на характер перехідного процесу. При врахуванні тільки першої відбитої хвилі рівняння можна апроксимувати рівнянням другого порядку, якому відповідає передаточна функція коливальної ланки із запізненням.
Отже, ділянку каналу як об'єкт системи автоматичного регулювання в першому наближенні можна представити інерційною ланкою з запізненням або ланкою другого порядку з запізненням. Коефіцієнти підсилення, сталі часу і запізнення цих ланок залежать від початкових умов і віддалі досліджуваного створу від нижньої перегороджуючої споруди.
Автоматичне керування водорозподілом в автономних системах здійснюється, в основному, за рівнем. Керування за витратою застосовують більш рідко. Як вимірювальні пристрої в системах керування за рівнем використовують рівнеміри, а в системах керування за витратою – витратоміри.
Вимірювання рівня води
У залежності від виду первинного вимірювального перетворювача прилади для вимірювання рівня поділяють на поплавкові, ємнісні, акустичні, пневматичні та електродні.
Читайте також:
- III. Процедура встановлення категорій об’єктам туристичної інфраструктури
- Аварії на пожежно-вибухонебезпечних об’єктах
- Аварії на радіаційно небезпечних об’єктах.
- Аварії на хімічно небезпечних об’єктах.
- Аварії на хімічно-небезпечних об’єктах та характеристика зон хімічного зараження.
- Авоматизація водорозподілу регулювання за нижнім б'єфом з обмеженням рівнів верхнього б'єфі
- Автоматизація водорозподілу з комбінованим регулюванням
- Автоматизація водорозподілу регулювання зі сталими перепадами
- Автоматизація водорозподілу регулюванням з перетікаючими об’ємами
- Автоматизація водорозподілу регулюванням за верхнім б'єфом
- Автоматизація водорозподілу регулюванням за нижнім б'єфом
- Автоматичне регулювання витрати помпових станцій
| <== попередня сторінка | | | наступна сторінка ==> |
| Автоматизація водорозподілу на відкритих зрошувальних системах. Методи керування водорозподілом. Вимірювання рівня води. Вимірювання витрати. | | | Поплавкові рівнеміри |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |