РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Складання програм для реалізації алгоритмів керування.
В першу чергу слід визначити таблицю привласнювання датчиків та сигналів керування.
В алгоритмах керування, які були запропоновані студентам для реалізації, використовуються 4 датчики (сигнали Х1, Х2, Х3, Х4) та 6 сигналів керування (У1, У2, УЗ, У4, У5, У6). В мікропроцесорній лабораторії "Мікролаб КР580М80" для прийому сигналів від датчиків використовується восьмирозрядний порт з адресою FА, до 1-го, 2-го і 3-го розряду якого підключені движкові перемикачі. Логічно з цих розрядів читати вхідні сигнали Х1, Х2, Х3 відповідно інші розряди порту FА використовуються монітором програмного забезпечення. Але при роботі програми користувача усі вони вільні і мають вхідні нулі. Тому будь-який з них може бути використаний для аналізу вхідного сигналу Х4. Сигнал Х4 введений в алгоритм керування для реалізації тимчасової затримки (таймера). Передбачено, що таймер повинний вмикатись за умовою Х4 = 0, тобто тимчасова затримка реалізується завжди. Тому, під час аналізу сигналу Х4 його можна читати у будь-який вільний розряд вхідного порту. Логічніше читати розряд 4-ий.Тоді вхідні сигнали будуть прив’язані до розрядів порту FА таким чином:

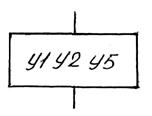
Сигнали керування реалізуються у вихідному порту з адресою F9. До кожного розряду порту підключений світлодіод. Прив’язка сигналів керування до розрядів вихідного порту може бути довільною. Прив’язка, яка має перевагу, одержує такий вигляд:

Програма, яка реалізує заданий алгоритм керування (програма користувача), починається з програмного настроювання інтерфейсу. Потім у порядку, який визначається конфігурацією алгоритму, аналізуються вхідні сигнали X у порту введення та формуються сигнали керування У у порту виведення. Техніка аналізу та формування сигналів відпрацьовувалась в лабораторній роботі № 5.
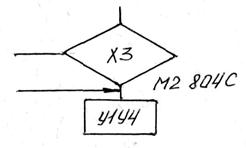
Для полегшення складання програми та зменшення кількості помилок бажано на граф-схемі алгоритму керування записувати команди, що реалізуються біля відповідних вершин графа.
Приклад:

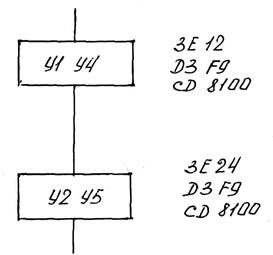
На граф-схемі алгоритму повинні бути розставлені мітки з вказанням адрес переходів.
Приклад:
При формуванні сигналів керування динамічним способом бажано використовувати підпрограму виведення, перед зверненням до якої в один регістр / РОН / заноситься маска сигналів, які вимикаються, в другий - маска сигналів які вмикаються.
Приклад:
 MVI D, <маска сигналів, які вимикаються>
MVI D, <маска сигналів, які вимикаються>
MVI E, <маска сигналів, які вмикаються>
CALL <адреса підпрограми>
Також бажано оформлювати підпрограмою аналіз датчиків (вхідних сигналів).
Приклад:
 MVI B, <маска датчиків>
MVI B, <маска датчиків>
CALL <адреса підрограми>
JZ <адреса переходу>
Реалізація тимчасової затримки завжди виконується спеціальною підпрограмою за методикою лабораторної роботи № 5. програма оформляється у вигляді таблиці такого змісту:
| Адреса | Машинний код | Мітка | Мнемокод | Коментар |
| 80ІF | ДВ | IN FA | Читання даних | |
| FА | ||||
| MVI B, 04 | Запис маски | |||
| AO | ANA B | Маскування | ||
| CA | JZ | Перехід за нулем | ||
| BF | LOOP | На мітку LOOP | ||
Структура програми керування відображує склад та взаємодію програмних модулів, а також прив’язку їх до адресного простору оперативної пам’яті користувача.
Приклад:

Введення та налагодження індивідуальних програм керування
Програма вводиться у оперативну пам’ять мікро-ЕОМ з адреси 8000. Адреси підпрограм вибираються довільно, проте підпрограму тимчасової затримки бажано розташувати з адреси 8100.
Шлях проходження алгоритму керування визначається розташуванням перемикачів вхідних сигналів. При цьому засвічуються усі світлодіоди в працюючих операторних вершинах. Відповідні комбінації сигналів керування вмикаються поперемінно з електронних елементів, проте сприймається їх одночасна робота.
Якщо під час проходження алгоритму виконується тимчасова затримка (таймер), то постійно горять світлодіоди затриманої операторної вершини, а решта світлодіодів даного шляху коротко проблискують. Таким чином перевіряється робота усіх гілок алгоритму керування.
Послідовність вмикання комбінацій вихідних сигналів можна спостерігати, штучно затримуючи кожну операторну вершину алгоритму, додаючи до неї таймер.
Приклад:
Для повернення програми у режим реального часу виклик таймера замінюється порожніми операторами НОП.
Читайте також:
- Cisco Packet Tracer - Знайомство з програмою. Інтерфейс
- I. Введення в розробку програмного забезпечення
- II. Вимоги до складання паспорта бюджетної програми
- II. Із програм для 11 класу
- II. ПРОГРАМА КУРСУ
- II.1 Програмне забезпечення
- III. Етапи розробки програмного забезпечення
- III. Навчально-програмний етап.
- III. Програма
- III. Програма
- WEB ПРОГРАММИРОВАНИЕ
- XV. Фінансові результати від первісного визнання та реалізації сільськогосподарської продукції та додаткових біологічних активів
| <== попередня сторінка | | | наступна сторінка ==> |
| ЛАБОРАТОРНА РОБОТА №6 | | | Демонстрація роботи програм викладачеві |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |