РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Приведення сили до даного центру.
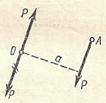
Нехай дана сила Р, що прикладена в якій-небудь точці А (рис. 3). Візьмемо довільну точку О та додамо до неї дві сили, рівні Р, їй паралельні й спрямовані в протилежні сторони.
|
Подібне перетворення можна розглядати як результат заміни даної сили Р іншою, паралельною їй силою Р, прикладеною в довільній точці О (на рис. 3 ця сила відзначена двома рисками), і парою (Р, Р) із плечем а, момент якої: М = + Ра.
Рис. 3.
Знак плюс у цій формулі відповідає прийнятому правилу знаків для моменту пари сил.
Заміну даної сили Р, прикладеної в точці А, силою Р, прикладеною в крапці О, і парою (Р, Р) будемо називати приведенням даної сили Р к точці О. Крапка О називається центром приведення, а пара (Р, Р) - приєднаною парою.
Не важко помітити, що момент приєднаної пари дорівнює моменту даної сили Р відносно центра приведення О.
3. Приведення довільної системи сил до даного центру.
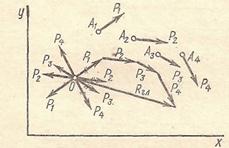
Дано систему сил (наприклад, чотири сили Р1, Р2, Р3, Р4), розташованих як завгодно на площині (рис. 1). Потрібно скласти ці сили.
|
Візьмемо довільну точку О і приведемо всі дані сили до цієї точки, скористуючись способом приведення сили до точки.
Рис. 1.
В результаті приведення отримаємо сили Р1, Р2, Р3 і Р4, що прикладені у точці О (позначені на рисунку двома рисками), і приєднані пари (Р1, Р1), (Р2, Р2) (Р3, Р3) і (Р4, Р4), моменти яких дорівнюють моментам даних сил відносно точки О. Тобто, позначаючи моменти пар відповідно М1, М2, М3 і М4, а моменти сил МО(Р1), МО(Р2), МО(Р3) і МО(Р4), отримаємо:
М1 = МО(Р1), М2 = МО(Р2), М3 = МО(Р3), М4 = МО(Р4) (1)
Складаючи сили Р1, Р2, Р3 і Р4, прикладені в центрі приведення 0 (відзначені на рисунку двома рисками): одержуємо результуючу силу Rгл, що дорівнює їх геометричній сумі й прикладену в тій же точці О:
Rгл= Р1 + Р2 + Р3 + Р4.
Складаючи пари (Р1, Р1), (Р2, Р2) (Р3, Р3) і (Р4, Р4) - одержимо результуючу пару, момент якої Мгл дорівнює алгебраїчній сумі моментів пар, що його складають. Отже:
Мгл=М1 + М2 + М3 +М4. (2)
Маючи на увазі рівності (1), вираження (2) можна надати так:
Мгл = М0(Р1) + М0(Р2) + М0(Р3) + М0(Р4), або 
4. Головний вектор і головний момент.
Геометрична сума даних сил Rгл називається головним вектором, алгебраїчна сума моментів цих сил відносно центра приведення Мгл – головним моментом.
Система сил, розташованих як завгодно на площині, завжди може бути приведена до сили, що дорівнює їх головному вектору та доданій в будь-якій точці О, та до пари, момент якої дорівнює головному моменту даних сил відносно тієї ж точки.
5. Рівновага плоскої довільної системи сил.
Плоска довільна система сил знаходиться в стані рівноваги тільки коли:
 ;
; 
Випадки приведення ПСС:
1. ,  - система пар сил, приводиться до пари сил (викликає обертаючу дію);
- система пар сил, приводиться до пари сил (викликає обертаючу дію);
2.  , - плоска система збіжних сил, приводиться до рівнодіючої (викликає поступовий рух);
, - плоска система збіжних сил, приводиться до рівнодіючої (викликає поступовий рух);
, - врівноважена плоска система сил
6. Рівняння рівноваги плоскої довільної системи сил.
Рівняння: 


виражають аналітичні умови рівноваги плоскої довільної системи сил.
Таким чином, для того, аби тверде тіло знаходилось в стані рівноваги, необхідно та достатньо, щоб:
1) сума проекцій всіх сил на вісь х дорівнювала нулю;
2) сума проекцій всіх сил на вісь у дорівнювала нулю;
3) сума моментів всіх сил відносно будь-якої точки площини дорівнювала нулю.
7. Класифікація балок, види опорів балок та їх реакції.
Класифікація балок :
1. Балка консольна
2. Балка шарнірна
3. Балка – консоль
Види опор балок:
1. Шарнірно-нерухома
2. Шарнірно-рухома
3. Жорстке кріплення
Читайте також:
- Види приведення даних
- Відбиває взаємозв'язок їх внутрішніх функціональних підрозділів і модифікується залежно від загальної кількості стратегій даного суб'єкта.
- Відшкодування збитку, завданого з вини працівника
- Держава- політична організація даного суспільства (країни) з певним режимом влади і органами управління.
- Для одиничного і дрібносерійного виробництва норма витрати визначається як укрупнена, наприклад, на 1000 станко-годин роботи даного виду роботи устаткування
- За даного розподілу владних повноважень районні державні адміністрацій будуть ліквідовані.
- Перехід від додатного числа, заданого в мінус-двійковій системі числення до від’ємного і навпаки
- Правовий механізм даного податку закріплено у розділі 13 ПКУ.
- При виробленні найкращих механізмів подолання дитячої безпритульності доцільно звернутись до міжнародного досвіду та до досвіду інших країн у вирішенні даного питання.
- Приведення булевих функцій до досконалих диз’юнктивних і кон’юнктивних нормальних форм
- Приведення національної шкали оцінювання до системи ЕСТS
- Приведення організаційної структури у відповідність до стратегії.
| <== попередня сторінка | | | наступна сторінка ==> |
| Аналіз фінансової стійкості підприємства. | | |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |