РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Лекція 6 «Перетворювачі сигналів і системи дистанційного передавання інформації»
Мал. 5. Класи мікропроцесорних комплексів.
1. Контролер на базі персонального комп'ютера (PC based control). Цей напрям істотно розвинувся останнім часом, зважаючи на підвищення надійності роботи персональних комп'ютерів; наявність їх модифікацій в звичайному і промисловому виконанні; їх відкритої архітектури; легкості включення в них будь-яких блоків введення/виводу, що випускаються рядом фірм; можливості використання вже напрацьованої широкої номенклатури програмного забезпечення (операційних систем реального часу, баз даних, пакетів прикладних програм контролю і управління). Основні сфери використання контролерів на базі PC - спеціалізовані системи автоматизації в медицині, в наукових лабораторіях, в засобах комунікації, в промисловості для невеликих досить замкнутих об'єктів. Загальне число входів/виходів такого контролера зазвичай не перевершує десятків, а виконуваними функціями є або досить складна обробка вимірювальної інформації з розрахунком декількох управляючих команд, або обчислення за спеціалізованими формулами, аргументами яких є вимірювані величини.
В загальних термінах можна вказати умови раціональної сфери застосування контролерів на базі PC в промисловості:
- при декількох входах і виходах об'єкту потрібно робити великий об'єм обчислень за досить малий інтервал часу (потрібна велика обчислювальна потужність);
- засоби автоматизації працюють в умовах, що не занадто відрізняються від умов роботи звичайних персональних комп'ютерів;
- немає необхідності у використанні жорсткого малого часу циклу контролера;
- функції, що реалізовуються контролером, доцільніше через їх нестандартність програмувати не на одній із спеціальних технологічних мов, а на звичайній мові програмування високого рівня типу C++, Pascal;
- потужна підтримка роботи операторів, що реалізовується в звичайних контролерах : діагностика роботи, усунення несправності без зупинки роботи контролера, модифікація програмного забезпечення під час роботи системи автоматизації - не має великого значення для заданого конкретного завдання.
На ринку PC based control працює в Росії дуже успішно ряд зарубіжних компаній : Octagon, Advantech, Analog Devices та ін.
2. Локальний контролер (PLC - Programmable Logic Controller). Нині поширюються декілька типів локальних контролерів :
- контролер, що монтується в устаткування (агрегат, машину, прилад) і є його невід'ємною частиною. Приклади такого "інтелектуального" устаткування : верстати з програмним управлінням, автомашиністи, сучасні аналітичні прилади:
- автономний контролер, що реалізовує функції контролю і управління невеликим, досить ізольованим технологічним вузлом (об'єктом).
Контролери, зазвичай, можуть мати десятки входів/виходів від датчиків і виконавчих механізмів : їх обчислювальна потужність може бути різною (малі, середні і великі контролери) : вони реалізують типові функції обробки вимірювальної інформації, логічного управління, регулювання. Багато хто з них має один або декілька фізичних портів для передачі інформації в інші засоби/системи автоматизації.
Приклади продукції зарубіжних фірм, що відносяться до цього класу програмно-технічних комплексів (ПТК), наведені нижче.
• General Electric Fanuc Automation випускає контролери серії 90 Micro;
• Rockwell Automation випускає контролери серії Micrologix 1000;
• Schneider Electric випускає контролери серії TSX Nano;
• Siemens випускає контролери серії С7-620.
3. Мережевий комплекс контролерів (PLC, Network). Цей клас ПТК є найбільш широко поширеним і впроваджуваним засобом управління технологічними процесами в усіх галузях промисловості. Мінімальний склад такого засобу :
• ряд контролерів;
• декілька дисплейних робітників станцій операторів;
• системна (промислова) мережа, що сполучає контролери і робочі станції між собою.
Контролери певного мережевого комплексу мають зазвичай ряд модифікацій, що відрізняються один від одного потужністю, швидкодією, об'ємом пам'яті, можливостями резервування, пристосуванням до різних умов довкілля, максимально можливим числом каналів входів і виходів. Це полегшує використання певного мережевого комплексу для різних технологічних об'єктів, оскільки дозволяє найточніше підібрати контролери необхідних характеристик під різні окремі вузли агрегату, що автоматизується, і під різні функції контролю і управління.
Дані мережеві комплекси контролерів мають верхні обмеження як по складності виконуваних функцій (зазвичай, типові функції виміру, контролю, обліку, регулювання, блокування), так і об'єкту, що за об'ємом самого автоматизується, в межах десятків тисяч вимірюваних і контрольованих величин (зазвичай, окремий технологічний агрегат, виробнича ділянка).
Більшість працюючих в СНД зарубіжних фірм поставляють мережеві комплекси контролерів. Відмітимо, приміром мережеві комплекси малих контролерів (близько сотень входів/виходів на контролер) :
• комплекси серійних контролерів DL 205, DL 305 фірм Koyo Electronics;
• комплекси серійних контролерів TSX Micro фірми Schneider Electric;
• комплекси серійних контролерів SLC - 500 фірм Rockwell Automation;
• комплекси серійних контролерів CQM1 фірми Omron.
Приклади мережевих комплексів великих контролерів (близько тисяч входів/виходів на контролер) візьмемо з продукції цих же фірм·
• комплекси серійних контролерів DL 405 фірм Коуо Electronics;
• комплекси серійних контролерів TSX Premium фірми Schneider Electric;
• комплекси серійних контролерів PLC - 5 фірм Rockwell Automation;
• комплекси серійних контролерів С200 фірми Omron.
4. Розподілені маломасштабні системи управління (DCS - Distributed Control Systems, Smaller Scale).
Цей клас мікропроцесорних засобів частково перетинається з класом мережевих комплексів контролерів, але в середньому перевершує більшість мережевих комплексів контролерів по потужності і гнучкості структури, а отже, і за об'ємом і складності виконуваних функцій. В цілому він ще має ряд обмежень автоматизуємого за об’ємом виробництва і по функціях, що реалізовуються.
Основні відмінності цих засобів від мережевих комплексів контролерів полягають в дещо більшій різноманітності модифікацій контролерів, розвиненій багаторівневій мережевій структурі, у більшій потужності центральних процесорів контролерів, в широкому використанні окремих конструкцій вмонтованих блоків введення/виводу, розрахованих на роботу в різних умовах довкілля; у розвиненішому і гнучкішому зв'язку з польовими приладами і з корпоративною мережею підприємства. Частенько вони мають декілька рівнів системних мереж, що сполучають контролери між собою і з робочими станціями операторів (наприклад, нижній рівень, використовуваний для зв'язку контролерів і робочої станції окремого компактно розташованого технологічного вузла і верхній рівень, що реалізовує зв'язки засобів управління окремих вузлів один з одним і з робочою станцією диспетчера усієї ділянки виробництва, що автоматизується). У ряді випадків розвиток мережевої структури йде у напрямі створення ряду польових мереж, що сполучають окремі контролери з віддаленими від них блоками введення/виводу і інтелектуальними приладами (датчиками і виконавчими пристроями). Такі досить прості і дешеві мережі дозволяють передавати інформацію між контролерами і польовими інтелектуальними приладами в цифровому виді по одній витій парі, що різко скорочує довжину кабельних мереж на підприємстві і зменшує вплив можливих перешкод, оскільки виключається передача низьковольтної аналогової інформації на значні відстані.
В цілому маломасштабні розподілені системи управління охоплюють окремі цехи і ділянки виробництва і, в доповненні до звичайних функцій контролю і управління, часто можуть реалізовувати складніші і об'ємніші алгоритми управління (наприклад, завдання статичної і динамічної оптимізації роботи об'єкту, що автоматизується). При цьому самі складні алгоритми залежно від їх об'єму і необхідної динаміки виконання реалізуються або в самих контролерах, або в обчислювальних потужностях пультів операторів.
Слід зазначити, що, використовуючи нечіткість меж класифікації ПТК і їх мінливість в часі, пов'язану з безперервною модернізацією окремих складових ПТК. деякі фірми, в рекламних цілях, називають свої досить обмежені по потужності і можливостям мережеві комплекси контролерів розподіленими системами управління.
Ряд поширюваних в СНД зарубіжними фірмами ПТК можна віднести до цього класу засобів. Приклади маломасштабних розподілених систем :
• ControlLogix розробки фірми Rockwell Automation;
• Simatic S7 - 400 розробок фірми Siemens;
• TSX Quantum розробки фірми Schneider Electric.
5. Повномасштабні розподілені системи управління (DCS, Full Scale).
Цей клас ПТК має усі особливості вище перелічених класів мікропроцесорних засобів управління і додатково має ряд з перерахованих нижче властивостей, що впливають на можливості повномасштабного використання цих засобів на підприємствах :
a) Розвинена мережева структура.
- наявність усіх трьох рівнів мереж (інформаційна, системна, польова) з наявними варіантами мереж окремих рівнів;
- використання потужних системних мереж, що дозволяють під’єднувати до однієї шини сотні вузлів (контролерів і пультів) і розподіляти ці вузли на значні (багатокілометрові) відстані;
- високі швидкості основних мереж і підтримка ними пріоритетної передачі найважливіших повідомлень/команд;
- широке і таке, що пропрацювало в масштабах цієї системи використання інформаційних мереж (зазвичай, мережі Ethernet) для зв'язку робочих станцій операторів один з одним, для їх зв'язку з серверами баз даних, для взаємодії цього ПТК з корпоративною мережею підприємства, для можливості побудови необхідної ієрархії управляючих центрів (планування, диспетчеризація, оперативне управління).
б) Широкий діапазон потужностей контролерів, що входять в систему.
- варіантність по числу обслуговуваних входів/виходів (від сотень до десятків тисяч опитуваних датчиків);
- наявність модифікацій, що розрізняються потужністю основного мікропроцесора, швидкодією, об'ємами пам'яті різного типу, можливостями резервування, мірою захисту від несприятливих умов довкілля;
- можливість в деяких потужних модифікаціях контролерів реалізувати багато сучасних високоефективних, але складних і об'ємних алгоритмів контролю, діагностики, моделювання, управління.
в) Різноманітність варіантів блоків введення/виводу.
- наявність вбудованих в контролер і видалених блоків введення/виводу, розрахованих на практично будь-які типи датчиків і старанних механізмів;
- модифікації видалених блоків введення/виводу для різноманітних умов промислового довкілля;
- варіанти «інтелектуальних» блоків введення/виводу, що реалізовують, у тому числі, прості алгоритми контролю і управління;
г) Широта модифікацій робочих станцій.
- можливий вибір варіантів робочих станцій по потужності і призначенню : стаціонарні і переносні пульти операторів технологічних процесів, диспетчерські робочі станції, контролюючі робочі станції керівного персоналу, інженерні станції;
- робота взаємодіючих робочих станцій управління в клієнт/серверному режимі;
- конструктивне оформлення пультів операторів з урахуванням ергономічних вимог.
д) Сучасність програмного забезпечення системи.
- розвинені мережеві SCADA - програми, модифікації, що мають, для різних рівнів управління;
- набір технологічних мов, що забезпечують завдання контролю, логічного управління, регулювання і мають потужні бібліотеки типових програмних модулів, що включають ряд ефективних сучасних модулів типу «Advance Control»;
- наявність у складі програмного забезпечення системи ряду прикладних пакетів програм, що реалізовують функції ефективного управління окремими агрегатами (багатозв'язкове регулювання, нейрорегулятори і регулятори на нечіткій логіці оптимізація і т. д.), функції диспетчерського управління ділянками виробництва (комп'ютерна підтримка ухвалення управлінських рішень), функції технічного обліку і планування виробництва в цілому;
- пакет програм автоматизації проектування і документування системи автоматизації.
е) Розвиненість верхнього рівня управління виробництвом.
- опрацювання засобів зберігання і обміну інформацією з іншими системами автоматизації різних рівнів управління і різного призначення;
- наявність програмних і технічних засобів побудови ряду рівнів управління виробництвом: планування, диспетчеризація, оперативного управління ділянками, динамічного управління окремими агрегатами;
- включення в комплекс ряду функцій по обслуговуванню виробництва (типу управління складами, обслуговування устаткування, контролю за рухом матеріальних потоків).
Приклади фірм : АББ - Symphony; Honeywell - ТРС і PlantScape; Valmet - Damatic XDi; Yokogava - Centum CS, Foxboro - I/A Series, Emerson - DeltaV та ін.
Промислову локальна мережузазвичай виділяють двох видів:
- за призначенням: промислові мережі, що зв'язують контролери між собою і з робочими станціями операторів
- за функціями комунікацій: польові канали і мережі, що зв'язують контролери з видаленими (виносними) блоками введення/виводу і з інтелектуальними приладами.
Ці комунікації не мають чіткої межі, що розділяє їх, деякі мережі можуть використовуватися для обох вказаних цілей, тому вони зазвичай об'єднуються загальним найменуванням - Fieldbus, що у буквальному перекладі означає "польова шина", а зазвичай в російській мові прийнято називати "промислова мережа". Промислову локальну мережу називають також промисловою шиною.
Шина - цей засіб забезпечення взаємодії близько розташованих об'єктів. Характерною особливістю шини як пристрої являється той факт, що усі взаємодіючі компоненти підключаються до шини однаковим чином. Шини тим або іншим чином є присутніми на усіх рівнях автоматизації. Нині найбільш поширені ті, що наслідують топологію мереж.
1) Загальна шина.

Мал. 6. Топологія мережі «Загальна шина».
- можливе підключення / відключення пристроїв під час роботи;
- небезпека втрати зв'язку при поодинокому обриві;
- присутність загального трафіку в усій системі;
- широко використовується для сильно розподілених об'єктів (дешевизна).
2) «Кільце«.
Мал. 7. Топологія мережі «Кільце».
- хороша пропускна спроможність;
- висока вартість;
- нераціональне використання мережевого трафіку;
- втрата синхронізації усієї мережі у разі відмови хоч би одного з вузлів.
3) «Зірка».
Мал. 8. Топологія мережі «Зірка».
- додатковий захист мережі від виходу вузлів з ладу;
- небезпека аварії при виході з ладу пристрою зв'язку;
- оптимізація трафіку.
Промислова мережа має ряд специфічних особливостей, що виділяють її в окремий клас, відмінний від інформаційних мереж :
- робота в режимі реального часу;
- необхідність передбачуваності часу передачі повідомлень і гарантія їх доставки за призначенням;
- відсутність передаваних великих масивів інформації;
- обов'язкова підвищена надійність передачі даних в промисловому середовищі (зокрема, при електромагнітних завадах);
- переважна робота на недорогих фізичних середовищах;
- можливість великих відстаней між вузлами мережі;
- зміцнена механічна конструкція апаратури мережі.
Лекція 6 «Перетворювачі сигналів і системи дистанційного передавання інформації»
План
1. Сельсинні перетворювачі та системи передавання інформації.
2. Частотні електричні перетворювачі.
3. Ємнісні перетворювачі.
4. Імпульсні перетворювачі.
5. П'єзоелектричні перетворювачі.
6. Пневматичні перетворювачі та системи передавання інформації.
7. Перехідні (узгоджувальні) перетворювачі.
8. Інтелектуальні технічні засоби автоматизації..
1.Для передавання на відстань великих кутових переміщень використовують сельсинні системи, у яких кутові переміщення перетворюються у сигнал вимірювальної інформації сельсинами.
Сельсин (рис. 1) являє собою мініатюрну трифазну електричну машину змінного струму, схожу на синхронний генератор або двигун. Найчастіше ротор сельсина 1(рис. 8.13, а)має однофазну обмотку 2 - обмотку збудження, а статор 3- трифазну обмотку 4,виконану за схемою «зірка», обмотку синхронізації (іноді їх розглядають як три обмотки, з'єднані «зіркою»). Схематично сельсини зображаються у вигляді, показаному на рис. 8.13, б.

Рисунок 1 - Будова (а) та спрощене зображення (б) сельсина: 1- ротор; 2 - обмотка збудження; 3- статор; 4 - обмотки синхронізації.
У сельсинах кутове переміщення ротора призводить до змінення індуктивного зв'язку між обмотками збудження та синхронізації. Під час проходження змінного струму через обмотку збудження створюється магнітний потік, який синусоїдно розподіляється по колу ротора та пронизує трифазну обмотку статора. Цей змінний магнітний потік індукуватиме в обмотках статора ЕРС, які будуть синфазними, але різними за амплітудою.
Схема сельсинної системи дистанційного передавання (рис. 2) складається з двох сельсинів, один з яких входить до складу ПВП, а другий - до складу приймача інформації (вторинного приладу). Ротор сельсина-приймача Р2 кінематично сполучений з відліковим пристроєм вторинного приладу.
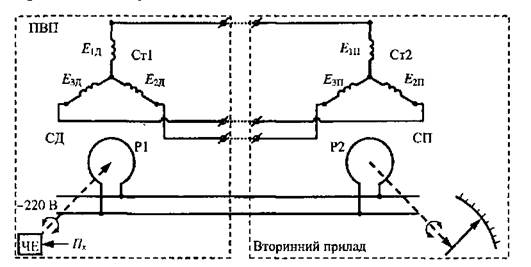
Рисунок 2 - Сельсинна система дистанційного передавання.
У разі відхилення ротора Р1 (через зміну значення вимірюваного параметра) від узгодженого з ротором Р2 положення, у відповідних обмотках ЕРС розрізняються і, отже, сили струмів, виниклих у зустрічно увімкнених обмотках статорів, не зрівноважуються. Тому (через зміну вхідної ЕРС, індукованої в обмотках статора СД)в лінії зв'язку потече струм. Цей струм, проходячи через трифазну обмотку статора СП, зумовлює зміну магнітного потоку, внаслідок чого виникає синхронізувальний момент Під впливом синхронізувального моменту ротор Р2 почне повертатися. Коли він повернеться на такий самий кут, що й ротор Р1 струм в імпульсній лінії стане нульовим, і ротор Р2 зупиниться, а кінематично сполучена з ним стрілка відлікового пристрою займе положення, що відповідає новому значенню вимірюваного параметра.
Особливість дистанційного передавання з використанням сельсинних перетворювачів полягає в тому, що воно дозволяє з високою точністю передавати на відстань будь-яку потрібну кількість обертів вихідної осі перетворювача, тоді як в інших перетворювачах хід рухомого елемента (наприклад, плунжера ДТП чи ММП) або кут його повороту (рамка ПФ) обмежені.
Сельсинні системи використовують для вимірювання на відстані різних величин (зокрема, рівня) в системах передавання команд, у схемах індикації (наприклад, положення кришок на технологічних апаратах) та сигналізації, в системах автоматичного контролю та регулювання тощо. Відстань між СД та СПу системах дистанційного передавання сигналів не може перевищувати 2-З км.
2.Для перетворення статичних (що не швидко змінюються) фізичних величин з досить високою точністю (похибка 0,1 %, нелінійність 0,1 %, поріг чутливості 0,03 %) у частотні вихідні сигнали використовують чутливі перетворювальні елементи з вібрувальними струнними, стрижневими, стрічковими, мембранними та іншими наперед механічно напруженими (наприклад, розтягуванням) вібраторами.
Найбільш поширені з таких перетворювачів струнні, що виконують перетворення за схемою вимірюваний параметр → сила → частота. Вимірюваним параметром Пх можуть бути тиск, температура (у разі вимірювання манометричним термометром), рівень і т. ін.
Електрична система передавання вимірюваної інформації з уніфікованим частотним сигналом (рис. 3) включає ПВП, що складається з ЧЕ, на якому вимірюваний параметр Пх перетворюється в зусилля Кх, та перетворювача «сила - частота», що перетворює зусилля Кх в уніфікований електричний сигнал. Частотний електричний перетворювач (ЧЕП) реалізується на базі струнного генератора, що являє собою мостову схему, утворену резисторами R1, R2, R3 та струною 3 з опором Rс. Електрично ізольована металева струна, що проходить між полюсними наконечниками постійного магніту, одним кінцем кріпиться до рухомого важеля 2, а другим - жорстко прикріплена до нерухомої основи.
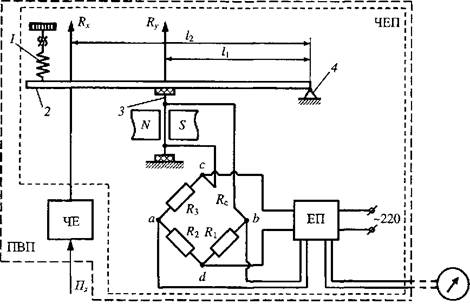
Рисунок 3 - Схема системи дистанційного передавання на базі струнного ЧЕП:
1 -коректор нуля; 2 - рухомий важіль; 3 - струна; 4 – опора.
Змінювання натягу струни, зумовлене зміною вхідного параметра Пх, призводить до зміни власної частоти коливання струни, яка перетворюється ЕП у частоту змінного струму (вихідний сигнал перетворювача).
Класи точності ПВП з частотним уніфікованим сигналом - 0,5 і 1,0. Дальність передавання інформації - до 10 км.
3.Ємнісні перетворювачі ґрунтуються на залежності електричної ємності конденсатора від розмірів і взаємного розміщення його пластин (електродів), а також від діелектричної проникності середовища між ними.
Перетворювач, зображений на рис. 4 а,являє собою конденсатор, одна пластина якого переміщується відносно другої так, що змінюється відстань δ між ними. Функція перетворення напруги нелінійна, причому чутливість зростає зі зменшенням відстані δ. Мінімальне значення δ визначається напругою пробою конденсатора. Такі перетворювачі використовують для вимірювання малих переміщень (менше 1 мм).

Рисунок 4 - Схеми ємнісних перетворювачів.
У диференціальному перетворювачі (рис. 4, б)під час переміщення центральної пластини ємність одного конденсатора збільшується, а другого - зменшується (іноді цю конструкцію називають двостаторною, на відміну від попередньої, яку називають одностаторною). Диференціальна конструкція дозволяє зменшувати нелінійність характеристики, збільшувати робочий діапазон зміщень, підвищувати чутливість перетворювача.
У перетворювачі, зображеному на рис. 4 в, у разі взаємного переміщення пластин відбувається зміна їх активної площі 5. Значного поширення набули також ємнісні перетворювачі, в яких змінною величиною є діелектрична проникність зазору між пластинами. їх використовують для вимірювання рівня рідин і сипучих речовин, а також для безконтактного вимірювання товщини електроізоляційних матеріалів (плівок, тканин, паперу, лакових покриттів тощо).
Ємнісні перетворювачі зазвичай живляться струмом підвищеної частоти, що дозволяє збільшувати потужність вихідного сигналу і зменшувати шунтувальну дію опору ізоляції. Вони прості за конструкцією, високочутливі, відносно малоінерційні. Ці перетворювачі мають малу масу та низьку чутливість до прискорень, водночас вони підпорядковані дії зовнішніх електричних полів, паразитних ємностей, температури, вологості, мають нелінійну характеристику (крім перетворювачів зі змінною площею пластин), потребують точного механічного виготовлення.
4.Імпульсні перетворювачі перетворюють кутову швидкість (деякі - кут повороту чи лінійне переміщення) в імпульсний електричний сигнал. Найчастіше їх використовують у дискретно-цифрових приладах для вимірювання швидкості обертання. Таким перетворювачам властиві мізерно мале споживання енергії від об'єкта вимірювання, незначні статичні та динамічні похибки, висока чутливість, висока сумісність з цифровими приладами та системами (до останніх їх підключають тільки через масштабувальні перетворювачі).
Індуктивні імпульсні перетворювачі.Схему частотного індуктивного тахометра показано на рис. 5. Вимірювальним елементом перетворювача є стальний диск 1із зубцями. Під час обертання диска зубці проходять у робочому зазорі 3 котушок індуктивності 2, увімкнених у контур високочастотного транзисторного генератора Г.

Рисунок 5 - Схема частотного індуктивного тахометра: 1- диск із зубцями; 2 -котушки індуктивності; 3- робочий зазор.
За наявності в зазорі зубця різко погіршується добротність контура через внесені активні втрати, і відбувається зрив коливань генератора. Тож відповідній швидкості чередування зубців і впадин диска відповідає певна частота «пачок» ВЧ-коливань, які після підсилення детектуються формувачем імпульсів Ф у вигляді однополярних коротких імпульсів.
Електректні імпульсні перетворювачі.Ці перетворювачі мають чимало переваг перед іншими електроімпульсними приладами: малі габарити та маса, проста конструкція, не потребують зовнішніх джерел живлення, можливість використовувати як ротор вал машини чи будь-яку обертову деталь (не потребують спеціальних зубців). Електрет 2 (рис. 6), наклеєний на обертову деталь чи ротор 1 машини, під час їх обертання електризується внаслідок тертя об повітря. Проходячи повз нерухомий, ізольований від корпуса електрод 3,електрет індукує на ньому заряд у вигляді імпульсу напруги, який знімається з електрода і подається на вимірювальний прилад. Вадою електретних перетворювачів є потреба в ретельному екрануванні перетворювача та кабеля.
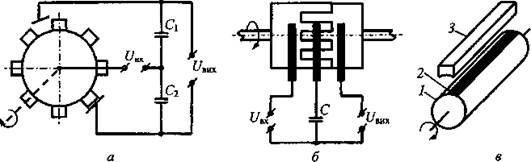
Рисунок 6 - Схеми імпульсних перетворювачів ємнісних безконтактного (а) та контактного (б)й електретного (в): 1- ротор; 2 - електрет; З-електрод.
Фотоелектричні імпульсні перетворювачі.Ґрунтуються на явищі фотоефекту: внутрішнього (змінюється опір напівпровідника - це фоторезистор) чи зовнішнього (змінюється емісія електронів з катода - фотодіод). Для побудови фотоелектричного перетворювача достатньо розмістити поблизу вала, швидкість якого вимірюється, джерело випромінення (освітлювач) 1 і фотоелемент 2 (приймач), а на валу закріпити диск із зубцями (рис. 7, а)або нанести (фарбою чи іншим способом) мітки (рис. 7, б), коефіцієнт відбиття яких відрізнявся би від коефіцієнта відбиття диска.
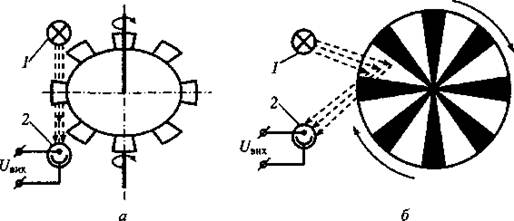
Рисунок 7 - Схеми фотоелектричних імпульсних перетворювачів.
Фотоелектричні імпульсні перетворювачі вирізняються відсутністю гальмівного моменту, простотою конструкції, мініатюрністю.
5.В основу принципу дії перетворювачів покладено відкрите братами Жаком і П'єром Кюрі в 1880 р. явище прямого п'єзоелектричного ефекту, що полягає в появі електричних зарядів на поверхні деяких кристалів (кварцу, сегнетової солі, турмаліну, титанату барію тощо; частіше використовують кварц через його малу температурну чутливість) під впливом механічних напружень, які виникають у них під дією прикладених зусиль. Обернений ефект (якщо, наприклад, до кварцової пластини підвести змінну напругу високої частоти, то вона буде здійснювати коливання відповідної частоти) називають явищем електрострикції.
Схему п'єзоелектричного перетворювача показано на рис. 8. Значення заряду (на різних поверхнях пластин 1, котрі являють собою паралельно з'єднані - механічно й електрично - стовпчики кварцу діаметром 5 мм завтовшки 1 мм, з'являються заряди різних знаків) зв'язане з прикладеною силою.
Зовнішні грані стовпчика з кварцових пластин 1ізолюються від корпуса перетворювача ізоляторами 2, а внутрішні - самим кварцом з дуже високим електричним опором. Завдяки накладеним на поверхню кристала металевим (фольговим) обкладинкам, які є конденсатором, електричний заряд перетворюється в електричну напругу
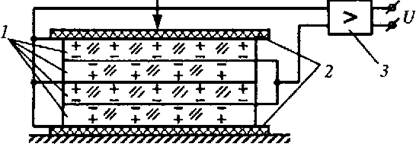
Рисунок 8 - Схема п'єзоелектричного перетворювача:
1- пластинки кварцу; 2 - ізолятори; 3- вихідний перетворювач-підсилювач.
Ці перетворювачі можна використовувати тільки для швидкозмінних величин (змінних зусиль, пульсацій тисків, вібрацій, прискорень тощо), тому для вимірювання статичних величин вони не придатні. Похибка становить 1 - 3 % від верхньої границі діапазону вимірювання.
Серед переваг п'єзоелектричних перетворювачів можливість застосування для вимірювання найбільших тисків і зусиль, широкий температурний діапазон, мінімальні пружні деформації, високі ди  намічні характеристики та чутливість, серед вад - потреба в забезпеченні дуже високого опору ізоляції, непридатність до статичних вимірювань.
намічні характеристики та чутливість, серед вад - потреба в забезпеченні дуже високого опору ізоляції, непридатність до статичних вимірювань.
6.Системи передавання вимірювальної інформації з уніфікованим пневматичним сигналом застосовують у тих галузях промисловості, у яких за умовами техніки безпеки недоцільне використання електричних систем передавання. Пневматична система передавання забезпечує надійне передавання інформації на відстань до 300 м, а з використанням спеціального підсилювача потужності - до 600 м (інформація передається каналами зв'язку, що являють собою пластмасову або металеву трубку внутрішнім діаметром 4... 10 мм). За більших відстаней між об'єктом і пунктом приймання інформації точність системи передавання інформації зменшується.
Усі пневматичні перетворювачі, прилади та функціональні блоки уніфікованої системи елементів промислової пневмоавтоматики (УСЕППА) містять механопневматичний перетворювач типу «сопло - заслінка» (його називають також керованим пневмодроселем), схему будови якого показано на рис. 9, а.
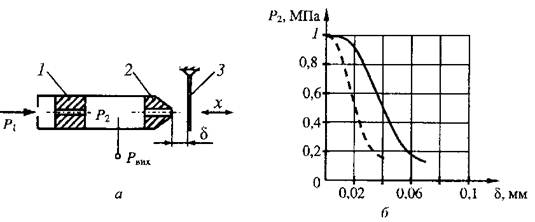
Рисунок 9 - Схема (а) та робоча характеристика (б)перетворювача типу «сопло-заслінка»: 1 - сопло; 2 - заслінка; З - постійний пневмодросель.
Стиснене повітря під постійним тиском Р1від джерела тиску через постійний пневмодросель 1(діаметр отвору 0,3 мм) надходить у проточну камеру формування вихідного сигналу Р2. З останньої стиснене повітря через сопло 2 (діаметр отвору 0,6...0,8 мм) прикрите заслінкою 3,виходить в атмосферу (при цьому сопло із заслінкою утворюють керований дросель).
Положення заслінки 2, яка переміщується під впливом вимірюваного параметра х відносно сопла 1,визначає прохідний переріз та величину тиску Р2у проточній камері, що сполучається з лінією зв'язку або із силовим елементом, куди спрямовується вихідний сигнал перетворювача Рвих.
Перетворювач «лінійне переміщення - пневмосигнал»Цей пневмоперетворювач побудовано за схемою компенсації переміщень. Він містить первинне реле, що має постійний дросель З,сопло 1 і заслінку 2, з'єднану з ЧЕ, та підсилювач, який складається з дросельної системи і сильфонного приводу (рис. 10).
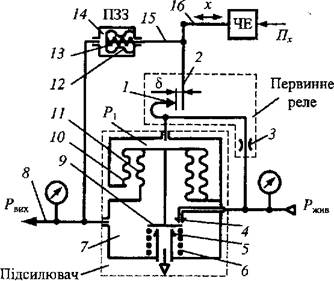
Рисунок 10 - Схема пневмоперетворювача типу «лінійне переміщення - пневмосигнал»:
1 - сопло; 2 - заслінка; 3- пневмодросель; 4,5 - сопла; 6,13- пружини; 7,14- камери; 8 - трубка; 9 - тарілчастий клапан; 10,11,12- сильфони; 15 - шток; 16 –важіль.
Перетворювач працює таким чином. Зі збільшенням вимірюваного параметра Пх (наприклад, тиск або будь-який інший параметр - рівень, температура, перепад - у вигляді тиску) важіль 16зміщується праворуч, а заслінка 2, переміщуючись ліворуч, прикриває сопло 1.При цьому тиск Р1над сильфонами збільшується, сильфони 10 і 11стискаються, тарілчастий клапан 9, стискаючи пружину 6,переміщується вниз, відкриваючи отвір сопла 4.У результаті тиск Рвиху камері 7 збільшується, досягаючи максимального значення за повного закриття сопла 5.
Перетворювач «кутове переміщення - пневмосигнал» Схему будови пневматичного передавального перетворювача типу ПП, що використовується як додатковий пристрій у первинних перетворювачах, а також у вторинних приладах типу КСП-3, КСМ-3 та ін., оснащених убудованими пневматичними пропорційно-інтегральними регулювальними пристроями, показано на рис. 11.
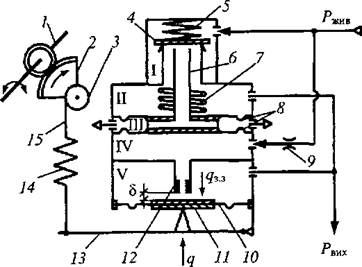
Рисунок 11 - Схема пневмоперетворювача типу «кутове переміщення - пневмосигнал»:
1, 2, 3- кінематичний механізм (поворотом вхідної осі 1 створює катет пружини 14); 4 -пластинчастий клапан; 5, 7,14- пружини; 6- порожнистий шток; 8- мембранний блок; 9 - постійний пневмодросель; 10 - мембрана; 11 - заслінка; 12 - сопло зворотного зв'язку; 13- важіль з упором; 15– трос.
Вихідний пневмосигнал Рвих формується у камері V у яку повітря надходить із камери І через пластинчастий клапан 4,сполучений із мембранним блоком 8порожнистим штоком 6. У положенні, показаному на рис. 8.13, пластинчастий клапан 4закрито зусиллям пружини 5, а камера V через порожнистий шток 6 і камеру Ш сполучена з атмосферою. У цьому разі вхідне зусилля мале, тому відповідно невеликий і тиск у камері IV, і опір на виході сопла 72. При цьому зусилля, що діє на мембранний блок 8з боку камери IV, менше, ніж зусилля, створюване пружиною 7.
Шток 6 піднімає пластинчастий клапан 4,відкриваючи його і одночасно перекриваючи сполучення камери II з камерою III (атмосфера). У результаті тиск у камері II, а отже, і Ряих будуть відповідно збільшуватись. Це викликає зростання тиску в камері зворотного зв'язку V і створеного мембраною 11 зусилля, яке зрівноважує зусилля д за нового значення зазору 8.
7.. Переважна більшість технічних засобів, що використовуються для контролю та керування хіміко-технологічними процесами, належать до двох гілок Державної системи приладів і засобів автоматизації - пневматичної або електричної. Для здійснення переходу між цими двома енергетичними гілками призначені перехідні (узгоджувальні) перетворювачі -аналогові та дискретні. Електропневматичні перетворювачі дискретної дії призначені для керування пневматичними колами сигналізації та позиційного регулювання технологічних параметрів за допомогою пневматичних сигналів, пневмоелектричні - за допомогою електричних. Аналогові перетворювачі призначені для перетворення неперервних уніфікованих сигналів одного виду в неперервні уніфіковані сигнали другого.
Перетворювач електропневматичний типу ЕПП-М. Його призначення - перетворення уніфікованого сигналу постійного струму 0...5, 0...20 або 4...20 мА у пропорційній пневматичний аналоговий сигнал 20. ..100 кПа. Клас точності - 1,5.
Дія перетворювача ґрунтується на принципі силової компенсації. Вхідний струм Івх, що проходить через котушки електромагніта поляризованого типу, утворює у магнітопроводі 9(рис. 12) магнітний потік, унаслідок чого на якорі 8виникає сила ІУвх, прямо пропорційна значенню вхідного струму.
Зі зміною вхідного струму момент, створюваний силою буде повертати важіль б, змінюючи відстань між соплом 2 і закріпленою на кінці важеля заслінкою 3, - це відповідно змінить тиск у лінії сопла 2. Підсилений за потужністю пневматичним реле 1 сигнал тиску у вигляді Рвих надходить на вихід перетворювача.
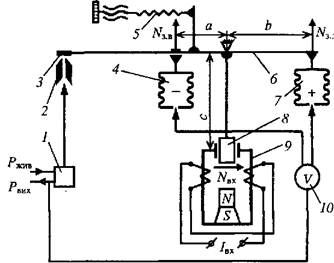
Рисунок 12 - Принципова схема електропневмоперетворювача ЕПП-М:
1 - пневматичне реле; 2 - сопло; 3 - заслінка; 4,7- від'ємний і додатний сильфони зворотного зв'язку; 5 - пружина встановлення початкового значення діапазону перетворення; 6 - важіль; 8,9- якір і магнітопровід електромагніта поляризованого типу; 10 - пневматична посудина.
Одночасно буде змінюватись тиск у сильфонах додатного 7 і від'ємного 4 зворотних зв'язків, спричинюючи появу сил зворотного зв'язку - додатного та від'ємного. Ці зміни будуть тривати доти, доки моменти зворотного зв'язку, що виникають у сильфонах 7 і 4від дії тиску вихідного сигналу Рвих, зрівноважують на важелі 6 дію моменту Мвх від вхідного сигналу Івх.
Пневмоелектричний перетворювач ППЕ-2. Перетворює неперервний уніфікований пневматичний сигнал у неперервний уніфікований сигнал постійного струму. Принципову схему перетворювача показано на рис. 13.
Частину струму Ішх вводять в обмотку зворотного зв'язку. У контурі тригер Т - обмотка збудження - резистор К виникають автоколивання струму, середнє значення та знак яких пропорційні величині та напрямові переміщення плунжера 2 і вихідному струмові.
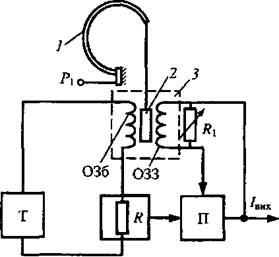
Рисунок 13 - Схема гшевмоелектричного перетворювача ППЕ-2:
1 - манометрична трубка; 2 - плунжер; 3 - керований дросель; ОЗб і ОЗЗ - обмотки збудження та зворотного зв'язку; П - підсилювач; Т - тригер Шмідта.
Вибухозахищений перетворювач ПЕВ-1. Перетворює дискретний пневматичний сигнал у межах від нуля до 0,6 МПа у дискретний електричний сигнал в автоматизованих системах керування технологічними процесами. Перетворювач містить комутувальний елемент 2 (рис. 14, а)та вмонтований у корпус 1 привідний пристрій, що складається з мембрани 3,штовхача 4,постійного магніту 5 і пружини 6. Комутувальний елемент виконано у вигляді перемикального геркона (магнітнокерованих герметизованих контактів).

Рисунок 14. Будова (а) і принципова схема (б) перетворювача ПЕВ-1:
а: 1 - корпус; 2 - комутувальний елемент (геркон); 3 - мембрана; 4 - штовхач; 5 - постійний магніт; 6 - пружина; б: 1,2,3,4- контакти геркона.
Без тиску повітря на вході геркон перебуває поза магнітним полем, яке створюється постійним магнітом 5. За таких умов контакти 1 і 2 (рис. 14, б)замкнені, а контакти 2 і 3 розімкнені.
Із надходженням пневматичного сигналу на вхід перетворювача мембрана 3 (рис. 14, а)деформується і за допомогою штовхача 4 переміщує постійний магніт 5 так, що геркон 2 опиняється в межах дії магнітного поля. Після спрацьовування геркона контакти 1 і 2 (рис. 14, б)розмикаються, а контакти 2 і 3 замикаються. Зі зняттям тиску повітря на вході штовхач 4 і постійний магніт 5 пружиною 6 повертаються у початкове положення, при цьому контакти 1 і 2 знову замикаються, а контакти 2 і 3 - розмикаються.
Перетворювач працює за температури довкілля 40...70 °С і відносної вологості до 100 %. Тиск спрацьовування не перевищує 0,01 МПа.
8.Термін " інтелектуальні " для первинних пристроїв був введений для тих первинних пристроїв, всередині яких міститься мікропроцесор. Зазвичай це додає нові функціональні можливості, яких не було в аналогічних пристроях без мікропроцесора. Наприклад, інтелектуальний датчик може давати більш точні свідчення завдяки застосуванню числових обчислень для компенсації нелінійності чутливого елемента або температурної залежності. Інтелектуальний датчик має можливість працювати з великою різновидом різних типів чутливих елементів, а також складати одне або кілька вимірів в однин новий вимір (наприклад, об'ємні витрати і температуру у вагові витрати) . І нарешті, інтелектуальний датчик дозволяє робити настроювання на інший діапазон вимірювань або напівавтоматичне калібрування, а також здійснювати функції внутрішньої самодіагностики, що спрощує технічне обслуговування.
Пристрій для дистанційного контролю рівня рідини.
Для автоматизованого обліку нафтопродуктів на сировинному і товарному складі, а також при перекачуванні необхідно контролювати рівень нафтопродуктів у ємностях. Для таких цілей розроблено велику кількість різних рівнемірів. Але більшість з випускаємих приладів для контролю рівня в багатотоннажних ємностях не задовольняють своїми експлуатаційними характеристиками споживача. Для комерційного застосування таких приладів, вимоги до них пред'являються дуже високі, це і експлуатація в широкому температурному діапазоні, висока точність, можливість зняття інформації в автоматичному режимі, передача інформації на великі відстані і простота в обслуговуванні.

1, 2 – кронштейни, 3 – ємність, 4, 5 – сильфони, 6 – поплавок, 7 – порожнистий циліндричний шток, 8 – днище сильфона, 9 – перетворювач малих переміщень, 10 – оптична решітка, 11 – оптоелектронна пара, 12 – втулка, 13 - циліндричний порожнистий шток, 14 - перетворювач імпульсів в цифровий код, 15 – мікроконтролер, 16 - блок пам'яті програм, 17 - блок пам'яті даних, 18 – табло алфавітно-цифрової індикації.
Рисунок 15 - Гідростатичний датчик рівня.
Пристрій представлений на рис. 15 задовольняє таким вимогам. Даний пристрій для безперервного контролю рівня рідини, заснований на вимірюванні гідростатичного стовпа рідини з автоматичною компенсацією на зміну щільності рідини. Прилад володіє також автоматичним коригуванням рівня від хвилювання рідини в ємності, яке виникає при перекачуванні нафтопродуктів з ємності або в ємність.
Гідростатичний датчик рівня рідини кріпиться кронштейнами 1 і 2 до стінки ємності 3 , рівень рідини в якій вимірюють . До кронштейнів одними кінцями закріплені сильфони 4 , 5 , інші кінці яких герметично укріплені на поплавці 6 . У поплавці 6 , частина якого показана в розрізі , встановлений порожнистий циліндричний шток 7 . Шток одним кінцем кріпиться до днища сильфона 8 , всередині якого розташований перетворювач малих переміщень 9, корпус якого розміщено в наскрізному отворі поплавка. Шток вільно ходить в поплавці . Оптоелектронний перетворювач включає в себе оптичну решітку 10 , закріплену до днища сильфона 8 , і оптоелектронну пару 11 , втулку 12 , через яку проходять з'єднувальні дроти від перетворювача 9 . Деталі й проведення електричної схеми залиті компаундом . Кронштейн 1 з'єднаний з циліндричним порожнистим штоком 13 герметично щодо ємності 3 . Через порожнистий шток провідниками оптоелектронна пара 11 з'єднана з перетворювачем імпульсів в цифровий код 14. Дані з перетворювача надходять в блок обробки інформації, в якості якого служить мікроконтролер 15, що має у своїй архітектурі блок пам'яті програм 16, блок пам'яті даних 17 і алфавітно-цифрову індикацію 18 .
Пристрій працює наступним чином. При заповненні ємності рідиною, рівень якої вимірюється, остання гідростатичним стовпом Н чинить тиск по всій ефективній площі вимірювального сильфона 8, при цьому переміщення дна сильфона і пов'язаного з ним штока 10 з оптичними гратами буде пропорційною і рівню і щільності. Одночасно під дією сили, що виштовхує поплавок 6, спільно з оптичними гратами 10, переміщується на сильфонах 4,5 пропорційно щільності рідини, тим самим здійснюється компенсація щільності рідини. При переміщенні днища сильфона 8 одночасно з ним переміщується оптична решітка 10, в результаті чого вона перетинає оптичні випромінювання світлодіодів і поперемінно затемняє фотодіоди, які виробляють імпульсні синусоїдальні сигнали, приймаючі нульові значення при кожному зсуві решітки 10 на один крок (16 мкм). Сигнали на виходах між собою зрушені на 90о.
Читайте також:
- I. Органи і системи, що забезпечують функцію виділення
- I. Особливості аферентних і еферентних шляхів вегетативного і соматичного відділів нервової системи
- II. Анатомічний склад лімфатичної системи
- IV. Розподіл нервової системи
- IV. Система зв’язків всередині центральної нервової системи
- IV. Філогенез кровоносної системи
- POS-системи
- T. Сутність, етіологія та патогенез порушень опорно-рухової системи
- VI. Філогенез нервової системи
- А) Заробітна плата її форми та системи.
- А) Заробітна плата, її форми та системи.
- А) Поліпшення системи зворотного зв’язку.
| <== попередня сторінка | | | наступна сторінка ==> |
| Класи мікропроцесорних комплексів | | | Лекція № 3. «Прилади для вимірювання температур» |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |