РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Вихідні пристрої систем автоматизованого керування й регулювання
До вихідних пристроїв належать тягові електромагніти, електромагнітні муфти, сервоелектродвигуни, серводвигуни мембранні та плунжерні.
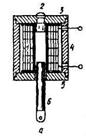
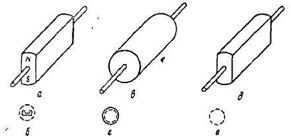
Тяговий електромагніт постійного струму зображено на рис.6.24, а (1 — котушка, 2—5 —осердя, 6— якір). Чим менший повітряний зазор  між якорем 6 тачастиною 2 осердя, тим меншим буде початкове значення струму при спрацьовуванні електромагніта. На рис 6.24, б показано, як зменшити повітряний зазор, не зменшуючи довжини ходу l: треба виготовити верхній кінець якоря у формі конуса, а в осерді зробити конічне заглиблення. Умовні графічні позначення — праворуч на рис. 6.24 (два варіанти).
між якорем 6 тачастиною 2 осердя, тим меншим буде початкове значення струму при спрацьовуванні електромагніта. На рис 6.24, б показано, як зменшити повітряний зазор, не зменшуючи довжини ходу l: треба виготовити верхній кінець якоря у формі конуса, а в осерді зробити конічне заглиблення. Умовні графічні позначення — праворуч на рис. 6.24 (два варіанти).
Тяговий електромагніт змінного струму показаний на рис. 6.25 (1 — мідне кільце для усунення вібрації якоря, 2 — котушка, 3 — осердя, 4 — якір), а на рис. 6.26 — двообмотковий тяговий електромагніт реверсивної дії ( —котушка прямого ходу;
—котушка прямого ходу;  — котушка зворотного ходу. Умовне-графічне позначення б).
— котушка зворотного ходу. Умовне-графічне позначення б).
Електромагнітна фрикційна муфта релейної дії (сухого тертя) зображена на рис. 6.27 (1 — осердя, розташоване на ведучому валу 2; 4— котушка; 7 — якір на веденому валу 6). При пропусканні струму по котушці якір, переміщуючись по шпонці, притискується до осердя, причому дотикання здійснюється по кільцевій поверхні, де і на осерді, і на якорі нанесено покриття 5, з високим коефіцієнтом тертя; тому якір починає обертатися разом з осердям. Після припинення подачі струму в котушку пружина відштовхує якір від осердя, й муфта розчіплюється. Для підведення струму до котушки використовуються контактні кільця та мідно-графітові щітки 5. Умовні графічні позначення для електричних схем — рис. 6.27, б, для кінематичних — 6.27, в.
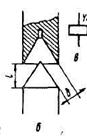
Електромагнітна феропорошкова муфта плавної дії (в`язкого тертя) показана на рис. 6.28, а (1 — ведучий вал, 2 — пристрій для підведення струму до котушки, 3 — котушка, 4 — дисковий якір на веденому валу 7, 5 — порожнисте осердя, 6 — феропорошок). При пропусканні струму по котушці намагнічується феромагнітний наповнювач (порошок карбонільного заліза; суміш залізного порошку з тальком; суміш залізного порошку з силіконовим маслом), що заповнює внутрішню порожнину осердя (зазор між осердям і якорем). Це збільшує в`язкість наповнювача, внаслідок чого виникає механічний зв'язок між ведучим та веденим валами. Змінюючи струм, можна змінювати обертальний момент, що передається від ведучого вала до веденого, — тобто також і швидкість обертання веденого вала. Ланцюжки з дрібних частинок феропорошку, які зчіплюються між собою під впливом магнітного потоку Ф, у збільшеному вигляді показані на рис. 6.28, б.
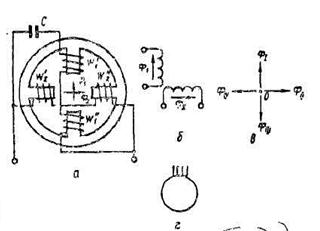
Найбільшого поширення набули допоміжні електродвигуни (сервоелектродвигуни, від англ. serve — служити), які можуть живитися від однофазної мережі змінного струму: конденсаторні та з розщепленими полюсами. У першому з них (рис. 6.29) обертове магнітне поле створюється за допомогою двох котушок w1 w2 (кожна з них складається з двох напівкотушок), зміщених у просторі на 90°; одна з цих котушок (на рис. 6.29, а— перша) ввімкнена через конденсатор, тому струм у ній випереджає струм другої котушки на чверть періоду. Внаслідок цього магнітний потік  випереджає
випереджає  на 90 електричних градусів. У такому статорі сумарний магнітний потік Ф змінює свій напрям (рис. 6.29, б, в), почерзі займаючи позиції
на 90 електричних градусів. У такому статорі сумарний магнітний потік Ф змінює свій напрям (рис. 6.29, б, в), почерзі займаючи позиції  -
-  -
-  -
-  , тобто обертаючись навколо осі 0; у даному випадку обертання відбувається за годинниковою стрілкою (правило: від напряму магнітного поля, що випереджає, до напряму поля, яке відстає). Умовне графічне позначення статора такого електродвигуна — рис. 6.29, г.
, тобто обертаючись навколо осі 0; у даному випадку обертання відбувається за годинниковою стрілкою (правило: від напряму магнітного поля, що випереджає, до напряму поля, яке відстає). Умовне графічне позначення статора такого електродвигуна — рис. 6.29, г.
У статорі двигуна на рис. 6.30, в тільки одна котушка (теж із двох напівкотушок), але магнітні полюси розщеплені, причому на одній частині кожного полюса розміщене мідне кільце (так само, як і в електромагнітному перетворювачі змінного струму (див. рис. 4.30, б)).
| 
|
| 
| 
|
| Рисунок 6.24 Тяговий електромагніт постійного струму: а – конструкція; б – конструкція якоря; в – умовне зображення на електричних принципових схемех | Рисунок 6.25 Тяговий електромагніт змінного струму: а – конструкція; б –умовне зображення на електричних принципових схемех |

| 
|
| Рисунок 6.26 Двообмотковий реверсивний електромагніт | Рисунок 6.27 Електромагнітна фрикційна муфта |

| 
|
| Рисунок 6.28 Електромагнітна феропорошкова муфта | Рисунок 6.29 Сервоелектродвигун: а – конструкція; б –обмотки; в –електромагнітні потоки; г – умовне зображення |
Внаслідок цього загальний магнітний потік котушки поділяється на дві частини — Ф1 та Ф2, причому Ф2 відстає від Ф1 майже на 90 електричних градусів. Зміщення двох магнітних полів на 90° як у просторі, так і в часі спричинює виникнення обертального поля (у даному випадку теж за годинниковою стрілкою, від напряму поля Ф1, що випереджає, до напряму поля Ф2, яке відстає). Умовне графічне позначення статора електродвигуна з розщепленими полюсами — рис. 6.30, б.

| 
|
| Рисунок 6.30 Еилектродвигун з розщепле-ними полюсами | Рисунок 6.31 Ротор асинхронного сервоелектродвигуна типу «біляче колесо» |
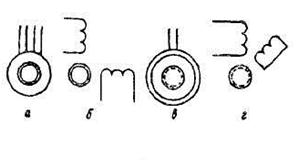
Різні варіанти роторів для сервоелектродвигунів зображено на рис. 6.31, 6.32 та 6.33.
У асинхронних сервоелектродвигунах використовуються ротори типу «біляче колесо» (рис. 6.31: а—розташування провідників у короткозамкненому роторі, б—конфігурація феромагнітної пластини для ротора, в — ротор «біляче колесо» у зібраному стані, г — умовне графічне позначення такого ротора). Недоліком цього ротора є велика інерційність. Для зменшення інерційності замість «білячого колеса» можна використати ротор у вигляді алюмінієвого стакана (рис. 6.32, а: 1 — нерухоме феромагнітне осердя ротора, 2— алюмінієвий стакан, 3 — вал ротора). Такий електродвигун теж асинхронний. Умовне графічне позначення такого ротора — на рис. 6.32, б.

| 
|
| Рисунок 6.32 Ротор у вигляді алюмінієвого стакана – а, та його умовне позначення - б | Рисунок 6.33 Різновидності роторів синхронних сервоелектродвигунів з активним ротором. |
Якщо ротор виконати з постійного магніту (рис. 6.33, а) і розкрутити його до такої ж швидкості обертання, з якою обертається магнітне поле, то надалі він обертатиметься з постійною швидкістю, такою ж, з якою обертається магнітне поле (це буде синхронний сервоелектродвигун з активним ротором). Але самостійно почати обертання в обертальному магнітному полі такий ротор не здатний. Умовне графічне позначення — на рис. 6.33, б. Для усунення цього недоліку можна виконати ротор у вигляді суцільного циліндра (рис, 6.33, в) з магнітотвердого матеріалу, з великим гістерезисом. Такий ротор, якщо його помістити в обертове поле, спочатку почне обертатися з асинхронною швидкістю, потім буде «втягнутий у синхронізм»: обертове поле захопить ротор, і надалі він працюватиме як активний. Цей синхронний сервоелектродвигун дістав назву гістерезисного (умовне графічне позначення—на рис. 6.33, г).
Можна виготовити ротор і з магнітом'якого матеріалу, якщо забезпечити магнітну асиметрію (рис. 6.33, д): у магнітному полі цей ротор прагнутиме зайняти таке положення, при якому його магнітний опір буде найменшим; це можливе тоді, коли магнітний потік проходитиме вздовж його головної осі симетрії (для рис. 6.33, д—вертикально). Спочатку ротор обертається з асинхронною швидкістю, потім втягується в синхронізм. Такий синхронний сервоелектродвигун дістав назву реактивного (умовне графічне позначення — на рис. 6.33, е).
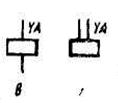
Зразки графічних позначень сервоелектродвигунів змінного струму зображено на рис. 6.34 (а, б — варіанти позначень для асинхронного конденсаторного сервоелектродвигуна з ротором Фєррариса; в, г — варіанти позначень для синхронного гістерезисного сервоелектродвигуна з розщепленими полюсами).
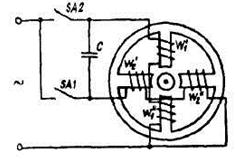
Схеми реверса конденсаторного сервоелектродвигуна — на рис 6.35: при замиканні SA1 конденсатор ввімкнений послідовно з w1, (обертання за годинниковою стрілкою); при замиканні SA2 конденсатор ввімкнений послідовно з w2 (обертання проти годинникової стрілки).
| 
|
| Рисунок 6.34 Графічні позначення сервоелектродвигунів: а, б – асинхронний конденсаторний серваоелектродвигун з ротором Феррариса; в, г – синхронний гістерезисний сервоелектродвигун з розщепленими полюсами | Рисунок 6.35 Схема реверса конденсаторного сервоелектродвигуна |
Оскільки змінити напрям обертання магнітного поля в сервоелектродвигуні з розщепленими полюсами неможливо (без зміни його конструкції — перестановки мідного кільця), для реверса такого сервопривода потрібна здвоєна конструкція (рис. 6.36: замикання SA1 забезпечує обертання за годинниковою стрілкою; при замиканні SA2 обертання буде в протилежному напрямі).
Зрозуміло, що в обох випадках (рис. 6.35 і 6.36) неприпустимо одночасно замикати SA1 та SA2.

| 
| 
|
| Рисунок 6.36 Здвоєна конструкція сервоелектродвигунів | Рисунок 6.37 Кроковий сервоелектродвигун | Рисунок 6.38 Схема руху крокового сервоелектродвигуна |
Кроковий сервоелектродвигун зображено на рис. 6.37 (на відміну від перетворювача, зображеного на рис. 4.31, у цьому сервоелектродвигуні крок руху значно менший). На статорі цього пристрою знаходяться три котушки, кожна з яких розділена на дві половини (на рисунку показано тільки першу котушку). Якщо подати живлення на першу котушку, ротор сервоелектродвигуна займе таке положення, як на рис. 6.37 та 6.38, а. Вимкнення першої котушки і подача живлення на другу примусить ротор обертатися
 за годинниковою стрілкою на 1/3 зубчастого кроку (рис. 6.38, б). При вимкненні другої і подачі живлення на третю — ще один такий же крок у тому ж напрямі (рис.6.38, в) і т. д. Почергове живлення котушок у порядку1 — 3 — 2 забезпечує обертання ротора проти годинникової стрілки.
за годинниковою стрілкою на 1/3 зубчастого кроку (рис. 6.38, б). При вимкненні другої і подачі живлення на третю — ще один такий же крок у тому ж напрямі (рис.6.38, в) і т. д. Почергове живлення котушок у порядку1 — 3 — 2 забезпечує обертання ротора проти годинникової стрілки.
Перевагою цього сервоелектродвигуна є те, що при його роботі ротор діє як безінерційний: миттєво починає обертання, якщо розпочинається подача імпульсів у котушки, та миттєво зупиняється після припинення живлення котушок або також миттєво змінює напрям обертання.
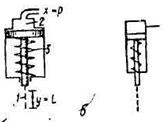
Мембранний сервопривод (пневматичний або гідравлічний) наведено на рис. 6.39, а-— звичайно на основі мембранних перетворювачів із м'якою мембраною (див. рис. 4.14, а (1 — шток, 2 —мембрана, З — пружина)). Якщо в камеру над мембраною 2 подати стиснене повітря ( ), то робочий шток 1, долаючи протидію пружини З, переміститься вниз (
), то робочий шток 1, долаючи протидію пружини З, переміститься вниз ( ). Близький до нього за принципом дії і зображений на рис. 6.39, б підпружинений поршневий серводвигун. Після припинення подачі робочої речовини (під тиском, )пружина повертає поршень у вихідне положення.
). Близький до нього за принципом дії і зображений на рис. 6.39, б підпружинений поршневий серводвигун. Після припинення подачі робочої речовини (під тиском, )пружина повертає поршень у вихідне положення.

| 
|
|
| Рисунок 6.39 Сервоприводи: мембранний – а; поршневий, підпружинений – б; поршневий диференційний - в |

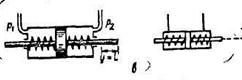
| Якщо робочою речовиною заповнюються камери з обох сторін від поршня (рис. 6.39, в), то залежно від різниці між  та та  поршень рухатиметься: праворуч при поршень рухатиметься: праворуч при  і ліворуч при і ліворуч при . Після припинення подачі робочої речовини пружини повертають поршень у середнє положення.
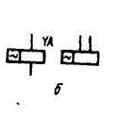
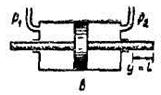
Поршневі сервоприводи безпружинні (без самоповернення) зображено на рис. 6.41: однобічний (а) та двобічний (в). Після припинення подачі робочої речовини поршень у цих сервоприводах залишається нерухомим — у тому положенні, якого він досяг до моменту припинення подачі стисненого повітря або рідини під тиском (умовні графічні позначення — б, г). . Після припинення подачі робочої речовини пружини повертають поршень у середнє положення.
Поршневі сервоприводи безпружинні (без самоповернення) зображено на рис. 6.41: однобічний (а) та двобічний (в). Після припинення подачі робочої речовини поршень у цих сервоприводах залишається нерухомим — у тому положенні, якого він досяг до моменту припинення подачі стисненого повітря або рідини під тиском (умовні графічні позначення — б, г).
|
| Рисунок 6.40 Вентиль з сервоприводом |
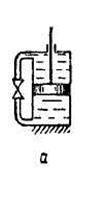
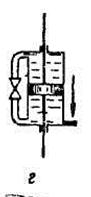
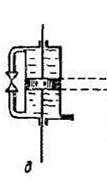
У деяких системах автоматики застосовується спеціальний допоміжний пристрій — демпфер (рис. 6.42, а): на трубі, що іззовні з'єднує верхню й нижню порожнини демпфера, встановлено регулювальний клапан, який гальмує перетікання робочої рідини з однієї порожнини в іншу. Якщо корпус демпфера закріпити, то цей пристрій можна вжити для гальмування при переміщенні окремих деталей. Варіант конструкції демпфера — на рис. 6.42, б.

| 
| 
| 
|
| Рисунок 6.41 Поршневі сервоприводи без пружинні (без самоповернення) |
Проте можна використати демпфер й інакше. Якщо корпус демпфера переміщувати досить швидко, разом з корпусом буде змушений так само переміщуватися й поршень — навіть при деякій протидії (рис. 6.42, в, г).
| 
| 
| 
| 
| 
|
| Рисунок 6.42 Демпфери (варіанти конструкцій) |
Якщо ж корпус демпфера переміщується повільно, поршень при наявності протидії залишається нерухомим (рис. 6.42, д, е).
Читайте також:
- Active-HDL як сучасна система автоматизованого проектування ВІС.
- Cпрямляючі пристрої
- D-тригер з динамічним керуванням
- I. Органи і системи, що забезпечують функцію виділення
- I. Особливості аферентних і еферентних шляхів вегетативного і соматичного відділів нервової системи
- II. Анатомічний склад лімфатичної системи
- II. Бреттон-Вудська система (створена в 1944 р.)
- III етап. Системний підхід
- IV. Розподіл нервової системи
- IV. Система зв’язків всередині центральної нервової системи
- IV. УЗАГАЛЬНЕННЯ І СИСТЕМАТИЗАЦІЯ ВИВЧЕНОГО
- IV. Філогенез кровоносної системи
| <== попередня сторінка | | | наступна сторінка ==> |
| Вторинні пристрої систем автоматизованого дискретного керування | | | Аграрне право як галузь права, його історичні витоки та особливості. |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |