РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Вимірювання лінійних та кутових розмірів
Тема 8. Вимірювання лінійних та кутових розмірів
Розмірів
-Завданнявимірюваньлінійнихтакутовихрозмірів
У класифікації фізичних величин за їх фізичними
властивостями (прийнятій, зокрема, в Міжнародній системі
одиниць) одну із груп величин становлять величини простору та
часу, до якої належать геометричні розміри, час та параметри
руху. Геометричнірозміри -цеширокагрупапонятьлінійнихта
кутовихрозмірів,площітаоб’єму. У свою чергу, до лінійних
розмірів належить довжина,товщина (грубизна)покрить,
відстаньміжоб'єктами,рівень,шорсткуватість (нерівність)
поверхні тощо. Головними кутовими розмірами є плоскийта
тілеснийкути. Час є однією із семи основних одиниць СІ. Час,
як і простір, - це одна із форм існування матерії. Вони
нерозривно пов'язані між собою, характеризуючи, зокрема,
параметри руху матерії, тобто динаміку матерії в просторі та в
часі. Лінійні та кутові переміщення, швидкості та прискорення
характеризують просторово-часовий стан об'єктів (матерії)
одного щодо іншого, прийнятого за нерухомий. Одним із
різновидів параметрів руху є витратирідкихчигазоподібних
речовин.
Вимірювання лінійних та кутових розмірів займають значне
місце в різних галузях науки та техніки, зокрема, в машино- та
приладобудуванні, де на вимірювання цих величин припадає до
80 % від всіх вимірювань в цих галузях. Завдання вимірювань
лінійних та кутових розмірів можна розділити на такі групи:
-
вимірювання лінійних розмірів в діапазоні від часток
мкм до декількох десятків метрів та кутових розмірів, від 0,1" до
360°. Найпоширенішими в цій групі є вимірювання розмірів
деталей, відхилення розміру деталі від заданого значення,
вимірювання параметрів шорсткуватості поверхні, товщини
покрить;
-
вимірювання розмірів від часток метра до сотень метрів
при визначенні рівня рідких та сипучих речовин у різних
резервуарах та свердловинах, рівня пального в баках різних
транспортних засобів;
-
визначення координат об’єктів та відстаней між
об’єктами, зокрема космічними, що знаходяться в межах від
одиниць міліметра до мільйонів кілометрів.
Останнім часом під впливом інтенсивного розвитку
інтегральних схем й мікропроцесорних пристроїв відбулось
корінне оновлення та значне урізноманітнення техніки, що
застосовується при вимірюваннях лінійних та кутових розмірів.
Сьогодні, завдяки прогресу в конструюванні приладів, можуть
бути реалізовані такі методи вимірювань, які ще кілька років
тому здавалися неймовірними. Нові апаратні рішення
призводять до появи нових різновидів методів вимірювань.
Донедавна
для
вимірювань
геометричних
розмірів
застосовували здебільшого прилади, що працюють за
аналоговим принципом. Сьогодні у зв’язку зі значним
прогресом в галузі первинних вимірювальних перетворювачів та
винятковими можливостями цифрової вимірювальної техніки,
на перший план виходять цифрові засоби вимірювань цих
величин. Їх основні переваги: можливість автоматизації
вимірювального процесу і автоматичної обробки результатів
вимірювань та неперервний запис результатів вимірювань.
Тому, розглядаючи засоби та методи вимірювань геометричних
розмірів, зупинимось тільки на електричних засобах, зокрема з
цифровим виходом, не забуваючи про те, що основною ланкою
засобів вимірювань геометричних розмірів є первинний
вимірювальний перетворювач.
-Основніелектричніметодитазасобивимірюваньлінійних
такутовихрозмірів
Основні електричні методики та відповідні їм засоби
вимірювань лінійних та кутових розмірів, залежно від наявності
чи відсутності механічного контакту між досліджуваним
об’єктом та засобом вимірювань, поділяють на контактніта
безконтактні, а залежно від принципу вимірювального
перетворення методи поділяють на електромеханічні,
електрофізичнітаспектрометричні (хвильові).
Електромеханічніметодики залежно від виду первинного
перетворювача поділяють на резистивні,індуктивні,ємнісні,
оптоелектронні,обкочування тощо.
Електрофізичніметодики вимірювань грунтуються на
використанні відмінності у фізичних властивостях речовин, що
знаходяться по різні сторони вимірюваного розміру. Для
вимірювань лінійних та кутових розмірів використовують
методики та прилади, основані на відмінностях електричних,
магнітних теплових та інших властивостей. Відповідно
електрофізичні методики поділяються на електромагнітні,
ємнісні, кондуктометричні тощо. Найпоширенішими з
електромагнітних є вихрострумові та резонансні методики.
Спектрометричні методики та відповідні засоби вимірювань,
залежно від довжини хвилі випромінювання, що
використовується при вимірюванні, поділяють на звукові
ультразвукові, радіохвильові, надвисокочастотні, оптичні
(лазерні). Залежно від фізичних явищ, які використовуються при
вимірюванні, спектрометричні методики поділяються на
локаційні, інтерферометричні, рефрактометричні тощо.
Електромеханічні методики широко застосовуються для
вимірювань розмірів деталей та шорсткуватості поверхні
(контактні штангенциркулі, мікрометри, профілеметри) для
вимірювань рівня (поплавкові та буйкові рівнеміри). Для
вимірювань відстаней, пройдених транспортними засобами,
широко використовують спосіб обкочування.
-Вимірюваннямалихлінійнихрозмірів
В контактних мікрометрах та профілеметрах координати
досліджуваного об'єкта попередньо перетворюються в лінійне
переміщення голкоподібного щупа, а згодом в електричний






 сигнал за допомогою індуктивних, взаємоіндуктивних чи
сигнал за допомогою індуктивних, взаємоіндуктивних чи
ємнісних перетворювачів.
Рис. 8.1 пояснює принцип дії вимірювача малих розмірів на
основі ємнісного перетворювача, який є елементом LC-контура
кварцового генератора.
Рис. 8.1. Принцип дії ємнісного профілеметра
Ємнісний перетворювач має нерухомий електрод 1,
напилений на полірований скляний стержень, та рухомий
електрод 2, механічно з’єднаний з голкоподібним щупом,
закріпленим в корпусі за допомогою пружини. Ємнісний
перетворювач за допомогою кабелю з’єднаний з кварцовим
генератором Гx, вихідна частота fxякого є функцією ємності
Cxміж рухомим та нерухомим електродами. Частота fxта
частота f0від опорного генератора частоти Г0подаються на
вхід суматора СМ, вихідна частота якого є ∆f (
f f − f ).
x 0
Після лінеаризації за допомогою мікропроцесора МП сигнал
надходить на цифровий відліковий пристрій, проградуйований в
мікрометрах.
Враховуючи, що
f
=
2ð
L C00
, (8.1)
де L C00 -індуктивність і ємність LC -контура опорного
генератора;
а при Cx= Cx0 + ∆ =C C0+ ∆C , де C0і ∆C - відповідно


























 початкова ємність та приріст ємності пернетворювача, fx
початкова ємність та приріст ємності пернетворювача, fx
дорівнюватиме
fx
=
2ð
L C
=
+ ∆
, (8.2)
x
2ð
L C00
C
C0
то в кінцевому рахунку отримаєм
1 1
1 ∆C
f
2ð
∆C
−
L C
≈ −
2 C
f0. (8.3)
L C00
1+
0 0
C0
За наведеною схемою будуються мікрометри з порогом
чутливості в частки мкм та діапазоном вимірювань 0,1…1 мм.
Такий мікрометр може використовуватись для вимірювань
параметрів шорсткуватості. Однак у цьому випадку можуть
виникати значні похибки через деяку нелінійність в
перетворенні реального профілю шорсткуватої поверхні в
лінійне переміщення щупа. Виникають також похибки через
відривання щупа в деяких точках профілю поверхні та внаслідок
деформації (пружної та пластичної) досліджуваної поверхні під
дією сили з боку щупа. Ці похибки визначаються зусиллям, що
створюється щупом. Зусилля загалом не є сталим і може
змінюватись залежно від інерційності перетворювача, радіуса
щупа, властивостей матеріалу та характеру профілю
досліджуваної поверхні. В цьому відношенні, перевагу має
віброконтактний метод, оснований на перетворенні в
електричний сигнал коливань вібруючого щупа.
Віброконтактний метод дає змогу здійснювати вимірювання
при незначних зусиллях щупа, який тільки періодично
торкається досліджуваного об'єкта. Завдяки цьому можна
використати тонкі щупи, що дає можливість вимірювати
розміри деталей, які легко деформуються, а також об’єктів
складної конфігурації.

















 Подібними за своєю конструкцією та вимірювальним колом є
Подібними за своєю конструкцією та вимірювальним колом є
індуктивні мікрометри-профілеметри, в яких вимірювальний
щуп у своїй верхній частині має закріплений феритовий
стержень, який при переміщенні штока змінює індуктивність
вимірювальної котушки. Котушка, індуктивність Lxякої є
функцією вимірюваного переміщенняю x , становить частотно-
залежний елемент LC-генератора. Якщо частота f0опорного
генератора є
f
0=2ð
L C00
,
а частота fxвимірювального генератора дорівнює
fx
=
2ð
L C
=
+ ∆
, (8.3)
x
2ð
L C00
L
L0
де L0та ∆L - відповідно початкова індуктивність та приріст
індуктивності перетворювача, то
f 1 ∆Lf0 . (8.4)
2 L0
Мікрометри-профілеметри з індуктивним первинним
перетворювачем дають змогу вимірювати мікронерівності від
0,1 мкм, а верхня границя вимірювань становить звичайно
декілька мм.
Здебільшого в приладо- та машинобудуванні необхідно
вимірювати не всі значення розміру, яке може досягати десятків
см і більше, а лише його відхилення від деякого заданого
значення, оскільки під час виготовлення деталі контролюється її
розмір. Ці відхилення звичайно не перевищують часток мм, а
отже, названі мікрометри можуть бути застосовані для цих
потреб.

Рис. 8.2. Ємнісний штангенциркуль та його вимірювальні кола
Для вимірювань розмірів у діапазоні між частками міліметра
до декількох сантиметрів, застосовують штангенциркуль
(рис.8.2,а) з довгоходовим щупом 1 та ємнісним
перетворювачем переміщень. Останній складається з
циліндричних зовнішнього 2 та внутрішнього 3 електродів і
екрана 4 з електропровідного матеріалу, з’єднаного механічно з
вимірювальним щупом. При переміщенні екрана ємність
вимірювального конденсатора буде змінюватись пропорційно
вимірюваному переміщенню. Для виключення впливу довкілля
на результат вимірювань передбачений компенсуючий
конденсатор, ємність CKякого дорівнює ємності вимірю-
вального конденсатора при x = 0 . Приклади електричних вимі-
рювальних кіл такого штангенциркуля наведені на рис. 8.2, б, в.
-Вимірюваннякутовихпереміщень
Прилад, призначений для вимірювання кутового
переміщення, зображено на рис. 8.3. За принципом дії він являє
собою диференціальний трансформаторний перетворювач, якір
якого може повернутись на кут á . При положенні рухомого
якоря як це показано на рис.8.3,а, значення вторинних напруг у
обмотках w2′ та w2′′ будуть однакові, оскільки ці обмотки
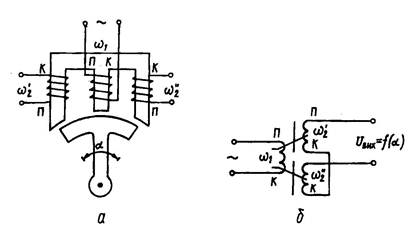 увімкнені зустрічно (рис. 8.3, б), так як вихідна напруга Uвих
увімкнені зустрічно (рис. 8.3, б), так як вихідна напруга Uвих
дорівнюватиме
′ ′′ ≈ ká , (8.5)
Uвих=w2− w2
де k - коефіцієнт пропорційності; á - кут відхилення якоря, то
напруга Uвих=0 .
Відхилення якоря від середнього положення на деякий кут á
спричиняє
появу
на
виході
вторинної
обмотки
диференціального трансформаторного перетворювача напруги
Uвих=f ( ) . Причому, якщо якор відхиляється від вихідного
положення вправо, то напруга в котушці w2′′ буде більшою ніж
напруга в котушці w2′ . В результаті цього Uвих<0 . Якщо ж якір
відхилиться у протилежному напрямку, то напруга в котушці w2′
буде більшою ніж в котушці w2′′ , в результаті чого Uвих>0 .
Отже
Uвих змінює свою полярність. Необхідно також
підкреслити, що залежність Uвих=f ( ) є лінійною.
Рис. 8.3. Прилад для вимірювання кутового переміщення:
а) принципова схема; б) схема увімкнення обмоток диференціально-
трансформаторного перетворювача: ù1 - первинна обмотка; ù ′2і ù ′′2 - дві
однакові складові вторинної обмотки; , - відповідно початок і кінець
обмотки
Читайте також:
- II. Критерій найбільших лінійних деформацій
- Автоматизація водорозподілу на відкритих зрошувальних системах. Методи керування водорозподілом. Вимірювання рівня води. Вимірювання витрати.
- Алфавітний підхід до вимірювання кількості інформації.
- АНАЛІЗ ЛІНІЙНИХ МОДЕЛЕЙ ЕКОНОМІЧНИХ ЗАДАЧ
- Аналіз трифазного з’єднання з урахуванням опорів лінійних проводів
- В якості критеріїв для оцінки або вимірювання предмета завдання з надання впевненості не можуть використовуватись очікування, судження або власний досвід аудитора.
- Визначення основних розмірів кулачкового механізму
- Визначення параметрів і показників для вимірювання кожного процесу та націлення їх на величини
- Вимірювання
- Вимірювання PCO2.
- Вимірювання активної потужності у трифазних електричних колах
- Вимірювання величини виробничого потенціалу підприємства на базі поелементного підходу.
| <== попередня сторінка | | | наступна сторінка ==> |
| Тема 7. Термометрія за випромінюванням тіла | | | Тема 9. Вимірювання товщини шару покриття |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |