РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Системи пересування, що винесені з забою ВСП-2, 1ЛГКН.
Структурна схема механізму переміщення очисного комбайна. Від валу електродвигуна ЕД обертовий момент передається через зубчасту передачу П1
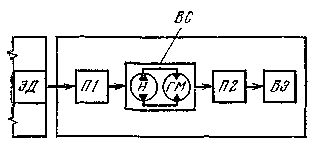
варіатору швидкості ВС і від нього через другу зубчасту передачу П2 - провідному елементу ВЕ (барабан, зірка, колесо та рейка).
Варіатор швидкості являє собою кинематическое ланка, передавальне відношення якого плавно регулюється вручну або автоматично для зміни швидкості і напрямку переміщення очисного комбайна. У варіатор швидкості зазвичай іс-користується зручний для регулювання вид енергії: енергія робочої рідини, енергія випрямленої електричного струму або енергія електромагнітного поля. Перший варіатор швидкості називають гідравлічним, а другий і третій - електричними. Відповідно механізми переміщення з цими вариаторами швидкості називають гідравлічними і електричними.
Пристрій механізму переміщення 1Г405 (рис 13.7). Механізм переміщення 1Г405 складається з двох основних складальних одиниць - гідромеханічного приводу 24 і електроблоку 28. У гідромеханічному приводі розташовані: радіально-поршні-вої варіатор швидкості, що складається з насоса 18 типу НП120 і гідромотора 11 типу ДП510И; двоступінчастий редуктор і дЕе приводні зірки для круглоланкового ланцюга. У электроблоке розташовані пусковий електрообладнання комбайна і регулятор режиму роботи УРАН.
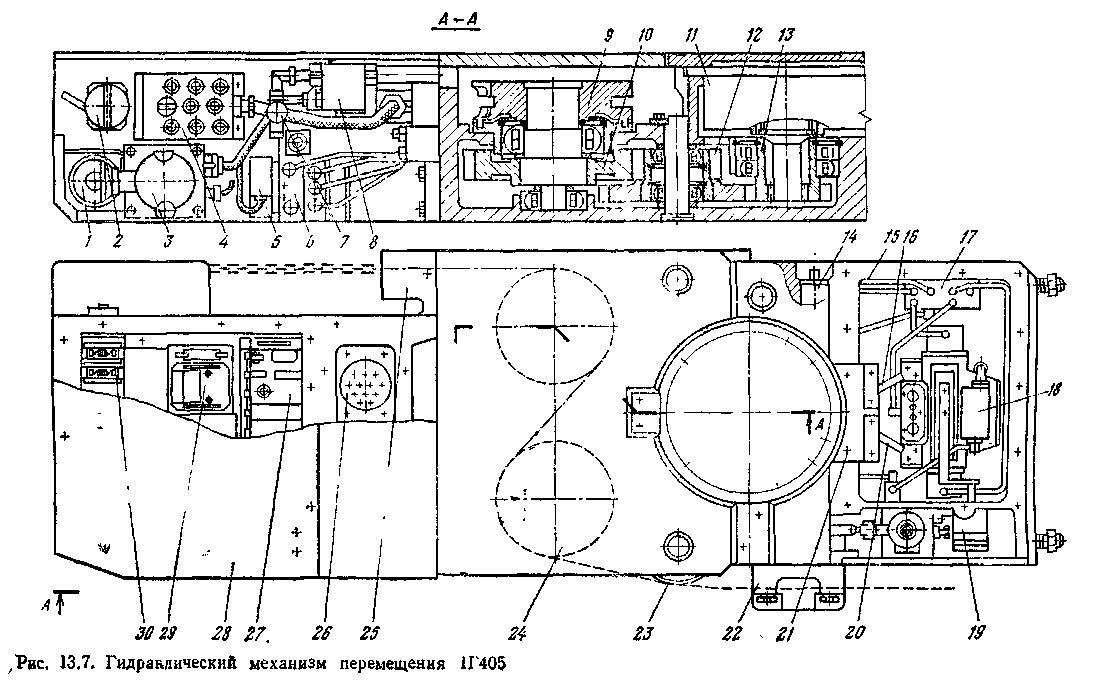
Насос 18 трубопроводами 16 і 20 з'єднаний зі вставкою 21, яка вварена в корпус 17. Канали у вставці з'єднують трубопроводи 16 і 20 з входами гідромотора //■ Фільтр 15 тонкого очищення робочої рідини встановлений поперек механізму переміщення і може очищатися з будь-якого боку. Прокладка ланцюга по механізму переміщення 1Г405 відповідає схемою, яка представлена на рис. 2.26. Введення і виведення ланцюга здійснюються за допомогою струмків 22 (див. мал. 13.7) і 25 і відводячих роликів 23.
Редуктор гідромеханічного приводу складається з вал-шестерні 13, блоку шестерень 12 і двох вихідних валів, на кожному з яких встановлені зубчасте колесо 10 і ланцюгова зірка 9. Вал-шестерня 13 з'єднана з гідромотором 11 зубчастої муфтою, яка розташована всередині вал-шестерні. Шестерня 12 встановлений на осі. Синхронне обертання зірок забезпечується зачепленням між собою співвісні з ними зубчастих коліс. У бічній камері гідромеханічного редуктора знаходяться датчик 19 швидкості переміщення і фільтр системи зрошення.
У вибухонебезпечній камері електроблоку 28 розташовуються: реверсивний комбайновий вимикач 30 типу ВРК2; блоки живлення 29; електронний регулятор 27 типу "УРАН"; прохідні затиски 26 для приєднання кабелів, кнопок "Стоп" з фіксацією вимикання комбайна, фари та ін. На стінці електроблоку встановлені: штепсельне введення 1; рукоятка 2 реверсивного вимикача ВРК.2; пульт управління 4, який входить до складу регулятора "УРАН"; электрогидроблок 6 із встановленим на ньому электрогидрораспределителем 5 типу РП 2; коробка 3 для підключення кабелів регулятора "УРАН" і электрогидрораспредели-теля РП 2; кран 7 включення комбайна і реле 8 контролю.
Конструкція електроблоку і гідромеханічної частини дозволяє виробляти їх перемонтаж залежно від розташування забою (правий або лівий), що необхідно для того, щоб тягова ланцюг розташовувалася по відношенню до вибою так, як це зображено на рис. 13.2, а рукоятки управління - на бічній поверхні корпуса з боку виробленого простору.
Охолодження механізму переміщення здійснюється водою з системи зрошення, що пропускається по каналу між верхньою кришкою гідромотора 11 і кожухом 14.
Автоматична система управління ВСП2. У винесеною системою переміщення ВСП2, застосовуваної на очисних комбайнів для тонких пологих пластів К103 і КА80 (див. мал. 13.4), здійснена автоматична система управління. Ця система забезпечення втрачає стабілізацію навантаження на комбайн і швидкості його переміщення, а також підтримує необхідне тягове зусилля приводу, вытягивающего з лави холосту гілка ланцюга.
Кожен з двох приводів винесеною системи переміщення ВСП2 (мал. 13.12) має автономний асинхронний електродвигун ЕДА. Через редуктор Pi цей електродвигун обертає якір Як електромагнітної муфти ковзання ЕМС, яка є варіантом швидкості переміщення. Якщо у нерухоме ярмо Яр подати струм порушення, то виникне магнітне зчеплення якоря Як і індуктора. Останній через редуктор Рг пов'язаний з провідним елементом ВЕ (приводна зірка тягового ланцюга).
Частота обертання і крутний момент на індикаторі І визначаються струмом порушення, регулюючи який можна забезпечити необхідний режим роботи очисного комбайна.
Переваги системи ВСП2: простота конструкції електромагнітної муфти ЕМС та використання асинхронного електродвигуна в якості приводу; недоліки: складна система
Винесена система переміщення, міняти на комбайнах, що працюють на похилих (понад 35°) і крутих шарів, складається з тягового-запобіжної двухбарабанной лебідки 1-2(мал. 13.5) типу 1ЛГКН, встановленої на вентиляційному штреку. Лебідка поєднує в собі механізм переміщення і утримує пристрій. Один з канатів 3 лебідки є тяговим, а інший 4 запобіжним, що забезпечує утримання комбайна 5, у разі пориву тягового. Комбайн виробляє виймання вугілля по напрямку знизу вгору; спуск комбайна здійснюється на двох канатах за рахунок складової сили його ваги.
Читайте також:
- I. Органи і системи, що забезпечують функцію виділення
- I. Особливості аферентних і еферентних шляхів вегетативного і соматичного відділів нервової системи
- II. Анатомічний склад лімфатичної системи
- IV. Розподіл нервової системи
- IV. Система зв’язків всередині центральної нервової системи
- IV. Філогенез кровоносної системи
- POS-системи
- T. Сутність, етіологія та патогенез порушень опорно-рухової системи
- VI. Філогенез нервової системи
- А) Заробітна плата її форми та системи.
- А) Заробітна плата, її форми та системи.
- А) Поліпшення системи зворотного зв’язку.
Переглядів: 1233
| <== попередня сторінка | | | наступна сторінка ==> |
| Основні вимоги до них, їх класифікація. | | | Механізмів, що передають крутячий момент. |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |