РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Електромеханічні засоби автоматизації водорозподілу
У випадках коли створення гідравлічних перепадів на перегороджуючих спорудах неможливо (пропорційні водоподільники) або недоцільно при малих (0,0001 ... 0,001) ухилах каналів, застосовують електричні системи регулювання, що забезпечують усі відомі способи регулювання рівнів і витрат, тому що давачі можна розташовувати на будь-яких відстанях від керованих затворів. Така система складається з об'єкта регулювання 3 (ділянки каналу, розташованого між давачем і затвором), давача 4, регулятора 1 і виконавчого пристрою 2, що складається з виконавчого механізму і щитового затвора (рис. 13.14).
Робота системи регулювання відбувається в такий спосіб. Вимірювання регульованої величини і перетворення її в електричний сигнал здійснює давач, сигнал з якого надходить у регулятор, де порівнюється з задаючим сигналом, величина якого відповідає необхідному значенню регульованої величини.
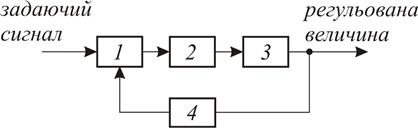
Рис. 13.14. Структурна схема електричної системи автоматичного регулювання.
Різниця задаючого сигналу і сигналу давача перетворюється в регуляторі у відповідності з закладеним законом регулювання у певний сигнал, що включає виконавчий механізм, який змінює положення затвора у напрямку компенсації збурення, яке вплинуло на систему регулювання.
Як уже показано, ділянка каналу як об'єкт регулювання має запізнення  , що залежить від часу добігання (спадання) зміненої витрати від затвора до давача. У неперервних системах регулювання запізнення викликає коливальний процес, якщо час переміщення затвора
, що залежить від часу добігання (спадання) зміненої витрати від затвора до давача. У неперервних системах регулювання запізнення викликає коливальний процес, якщо час переміщення затвора
 /13.7/
/13.7/
де  – зміна переміщення затвора, при якій забезпечується компенсація витрати, що змінилося;
– зміна переміщення затвора, при якій забезпечується компенсація витрати, що змінилося;  – швидкість переміщення затвора, буде більшим за .
– швидкість переміщення затвора, буде більшим за .
Дійсно, якщо  , то за час
, то за час  затвор переміститься на
затвор переміститься на  і виникне перерегулювання - відхилення регульованої величини протилежного знака відносно усталеного значення. При перерегулюванні регулятор виробить сигнал на переміщення затвора в протилежному напрямку, що при знову викликає перерегулювання і т.д. Амплітуда коливань може наростати і зумовити переповнення каналу.
і виникне перерегулювання - відхилення регульованої величини протилежного знака відносно усталеного значення. При перерегулюванні регулятор виробить сигнал на переміщення затвора в протилежному напрямку, що при знову викликає перерегулювання і т.д. Амплітуда коливань може наростати і зумовити переповнення каналу.
Щоб виключити коливання, переміщення затвора повинне бути залежним від відхилення регульованої величини від заданого значення, тобто
 , /13.8/
, /13.8/
де  – коефіцієнт, який визначають з витратної характеристики затвора.
– коефіцієнт, який визначають з витратної характеристики затвора.
Залежність /13.8/ може реалізувати регулятор, який при виникненні неузгодженості  , що виходить за зону нечутливості
, що виходить за зону нечутливості  , виробляє імпульс на переміщення затвора тривалістю
, виробляє імпульс на переміщення затвора тривалістю
 . /13.9/
. /13.9/
Після імпульсу регулятор створює паузу, протягом якої затвор не переміщується, а регульована величина наближається до заданого значення, Якщо за час паузи регульована величина не досягає зони нечутливості , то регулятор виробляє другий імпульс і т.д. Регулятори, що формують разом з виконавчим пристроєм сталою швидкості такий закон регулювання, називаються пропорційно-інтегральними регуляторами і описуються рівнянням
 , /13.10/
, /13.10/
де  і
і  – відповідно вихідна і вхідна величини регулятора;
– відповідно вихідна і вхідна величини регулятора;  – коефіцієнт пропорційності;
– коефіцієнт пропорційності;  – стала часу інтегрування.
– стала часу інтегрування.
Рівнянню /13.11/ відповідає передаточна функція
 . /13.11/
. /13.11/
Для структурної схеми (рис. 13.14) передаточна функція замкнутої системи регулювання матиме вид
 , /13.12/
, /13.12/
де  – передаточна функція об'єкта;
– передаточна функція об'єкта;  – передаточна функція вимірювального пристрою.
– передаточна функція вимірювального пристрою.
При швидкій зміні рівнів регулятор доповнюють диференціюючою ланкою. У такому складі регулятор формує пропорційно-інтегрально-диференціальний закон регулювання і його передаточна функція має вигляд
 , /13.13/
, /13.13/
де  – стала часу диференціювання, яку можна регулювати в діапазоні 5 ... 500 с.
– стала часу диференціювання, яку можна регулювати в діапазоні 5 ... 500 с.
Читайте також:
- L2.T4/1.1. Засоби періодичного транспортування штучних матеріалів.
- L2.T4/1.2. Засоби безперервного транспортування матеріалів. Транспортери.
- L2.T4/1.3. Засоби дозування сипучих матеріалів.
- L3.T4/2. Засоби переміщення рідин.
- V Засоби навчання
- Авоматизація водорозподілу регулювання за нижнім б'єфом з обмеженням рівнів верхнього б'єфі
- Автоматизація водорозподілу з комбінованим регулюванням
- Автоматизація водорозподілу на відкритих зрошувальних системах. Методи керування водорозподілом. Вимірювання рівня води. Вимірювання витрати.
- Автоматизація водорозподілу регулювання зі сталими перепадами
- Автоматизація водорозподілу регулюванням з перетікаючими об’ємами
- Автоматизація водорозподілу регулюванням за верхнім б'єфом
- Автоматизація водорозподілу регулюванням за нижнім б'єфом
| <== попередня сторінка | | | наступна сторінка ==> |
| Гідравлічні засоби автоматизації водорозподілу | | | Загальні положення |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |