РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Автоматизація помпових станцій підкачування і перекачування. Охорона праці під час експлуатації систем автоматизації.
ЛЕКЦІЯ № 16
ТЕМА: „АВТОМАТИЗАЦІЯ МЕЛІОРАТИВНИХ ПОМПОВИХ СТАНЦІЙ. ”
Автоматизація помпових станцій підкачування
Ці станції працюють на закриту мережу, підтримуючи в ній тиск, чи витрату, що забезпечують нормальну роботу підключених до неї дощувальних машин і апаратів. При роботі на мережу, зазвичай відсутні будь-які накопичуючи ємності і тому подача води помповою станцією дорівнює загальному споживанню дощувальною технікою. За цієї умови можуть виникати гідравлічні удари при переключеннях помпових агрегатів і дощувальної техніки. Ця особливість враховується при виборі технологічного обладнання і систем автоматичного керування.
Принципова технологічна схема і схема автоматизації помпової станції підкачування із шістьма основними помповими агрегатами представлена на рис. 16.1. Шість помпових агрегатів №1–№6 з водозабором з головного магістрального каналу подають воду у загальний трубопровід. На станції встановлені два допоміжні (бустерні) помпи №7 і №8, які періодично підкачують воду в мережу коли не працює дощувальна техніка. До напірного трубопроводу підключений водно-повітряний резервуар, призначений для гасіння гідравлічних ударів і стабілізації тиску у мережі. Крім цього, на станції установлений вакуум-насос для заливки основних і бустерних помп, вентилятори і системи підтримки нормальної температури в приміщенні помпової станції. Система автоматизації складається з приладів і пристроїв контролю технологічних параметрів, керування, сигналізації і захисту устаткування при аваріях. Вони монтуються по місцю: у шафах керування й у шафах автоматики, вимірювання і сигналізації технологічних величин.
Система автоматики забезпечує автоматизацію роботи помпової станції у трьох режимах:
- наповнення трубопровідної мережі;
- черговий режим, коли не працює дощувальна техніка;
- робочий режим при зміні витрати.
Крім того передбачено:
- двопозиційне автоматичне керування допоміжними помповими агрегатами за тиском в трубопроводі (поз. 5,6 на рис. 16.1);
- двопозиційне автоматичне керування компресором за рівнем води у водоповітряному резервуарі при нормальному робочому тиску (поз. 6, 7а, 7д);
- двопозиційне автоматичне керування дренажними помпами за рівнем води у дренажному приямку (поз. 9а, 9б);
- двопозиційне автоматичне керування вентилятором і електропідігрівачем за температурою у приміщенні станції;
- сигналізацію про аварійно низький рівень води в магістральному каналі і заборону роботи помпових агрегатів (поз 1а...1д);
- контроль температури підшипників помпових агрегатів (поз. 2а, 2б);
- сигналізацію про перевищення максимальної витрати води (поз. 3і); і про відхилення від нормального тиску в напірному трубопроводі (поз. 4);
- сигналізацію про відхилення від нормального рівня води у водноповітряному резервуарі (поз. 7б, 7в);
- сигналізацію про аварійно високий рівень води в дренажному приямку (поз. 8а, 86).
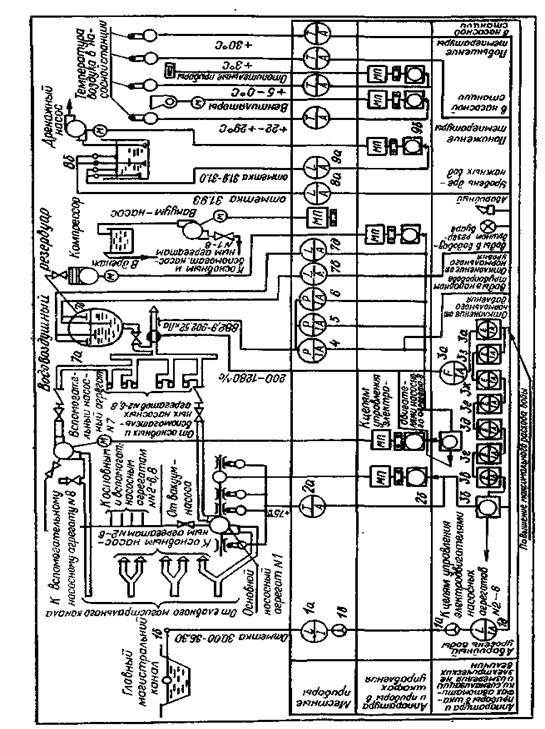
Рис. 16.1. Принципова технологічна схема і схема автоматизації помпової станції підкачування
Автоматизація наповнення водопровідної мережі.Оскільки за умовами експлуатації на зиму спускається вода з мережі то до початку зрошення її необхідно наповнювати водою, і це треба зробити так, щоб в мережі не виникали гідравлічні удари і двигун помпи не перевантажувався. Ці вимоги забезпечує система керування відкриттям засувки на напірному трубопроводі, структурна схема якої наведена на рис. 16.2.

Рис. 16.2. Структурна схема керування наповненням напірних трубопроводів.
Керування двигуном помпи, яка використовується для наповнення мережі, здійснюється за допомогою станції керування двигуном помпи СКДП. Пуск за сигналом оператора  відбувається на закриту засувку. Керування відкриттям засувки здійснює блок логічних елементів за наступним алгоритмом. Величину тиску перед засувкою, при якому можливе її відкриття задає оператор у виді сигнала
відбувається на закриту засувку. Керування відкриттям засувки здійснює блок логічних елементів за наступним алгоритмом. Величину тиску перед засувкою, при якому можливе її відкриття задає оператор у виді сигнала  . Цей тиск дещо більший номінального тиску помпи. При розгоні помпи тиск перед засувкою зростає і, коли він досягне величини
. Цей тиск дещо більший номінального тиску помпи. При розгоні помпи тиск перед засувкою зростає і, коли він досягне величини  , сигнал з давача тиску Р стане рівним сигналу . При рівності цих сигналів на виході схеми порівняння П появиться сигнал, який поступить на логічний елемент І. Коли на вхід елементу І поступить сигнал від давача швидкості BR про закінчення розгону двигуна помпи, то на виході з’явиться сигнал, який зумовить включення двигуна засувки через станцію керування СКДЗ. Двигун ДЗ через редуктор почне відкривати засувку, тиск перед засувкою почне знижуватися і коли він стане рівним номінальному тиску помпи зникне сигнал на виході елемента І і двигун-засувки зупиниться.
, сигнал з давача тиску Р стане рівним сигналу . При рівності цих сигналів на виході схеми порівняння П появиться сигнал, який поступить на логічний елемент І. Коли на вхід елементу І поступить сигнал від давача швидкості BR про закінчення розгону двигуна помпи, то на виході з’явиться сигнал, який зумовить включення двигуна засувки через станцію керування СКДЗ. Двигун ДЗ через редуктор почне відкривати засувку, тиск перед засувкою почне знижуватися і коли він стане рівним номінальному тиску помпи зникне сигнал на виході елемента І і двигун-засувки зупиниться.
Помповий агрегат буде наповнювати мережу і тиск перед засувкою почне підвищуватись. Коли він досягне значення , появляться сигнали на виходах П і І і засувка знову почне відкриватися, тиск перед нею знову зменшуватиметься, що призведе до відключення двигуна засувки. Цей процес короткочасного включення двигуна засувки буде продовжуватись доти, доки вона не відкриється повністю. При цьому з шляхового давача, який приводиться в рух редуктором, поступає сигнал на відключення двигуна від мережі живлення.
Кількість циклів роботи і зупинок двигуна залежить від характеристик напірної мережі і її ємності.
В режимі наповнення оператори здійснюють закриття гідрантів після видалення повітря з трубопроводів.
Безпосередньо після повного відкриття засувки ,за сигналом давача положення, включається компресор і повітря накачується у водоповітряний резервуар (ВПР) до заданого тиску  , при досягненні якого відкривається засувка підключення ВПР до напірного трубопроводу, і вода, частково заповнюючи ВПР, призводить до підвищення тиску до номінального значення
, при досягненні якого відкривається засувка підключення ВПР до напірного трубопроводу, і вода, частково заповнюючи ВПР, призводить до підвищення тиску до номінального значення  при якому давач тиску видає сигнал на зупинку помпи. Створена у ВПР повітряна подушка демпфує гідравлічні удари. Після цього станція переходить у режим регулювання тиску (черговий режим).
при якому давач тиску видає сигнал на зупинку помпи. Створена у ВПР повітряна подушка демпфує гідравлічні удари. Після цього станція переходить у режим регулювання тиску (черговий режим).
Автоматизація чергового режиму.Із-за втрат води через нещільності, тиск в мережі поступово знижується і коли він стане рівним  (точка Б на рис. 15.3, лекція 15) давач тиску видає сигнал на включення привода бустер-помпи, продуктивність якої більша втрат води, які складають 2...3% від номінальної витрати станції. При роботі бустер-помпи тиск у мережі підвищується і, коли він досягне номінального значення (точка А на рис. 15.3, лекція 15), давач тиску виробляє сигнал на відключення помпи. З цього часу втрати з мережі компенсуються витратою води з ВПР і тиск у мережі поступово падає. При досягненні встановленої нижньої межі відбувається повторне включення бустерної помпи, яка, крім компенсації втрат, забезпечує підвищення рівня води у ВПР. Отже, бустер-помпа і ВПР почергово компенсують втрати мережі.
(точка Б на рис. 15.3, лекція 15) давач тиску видає сигнал на включення привода бустер-помпи, продуктивність якої більша втрат води, які складають 2...3% від номінальної витрати станції. При роботі бустер-помпи тиск у мережі підвищується і, коли він досягне номінального значення (точка А на рис. 15.3, лекція 15), давач тиску виробляє сигнал на відключення помпи. З цього часу втрати з мережі компенсуються витратою води з ВПР і тиск у мережі поступово падає. При досягненні встановленої нижньої межі відбувається повторне включення бустерної помпи, яка, крім компенсації втрат, забезпечує підвищення рівня води у ВПР. Отже, бустер-помпа і ВПР почергово компенсують втрати мережі.
Так буде продовжуватись до тих пір, поки не буде включена в роботу дощувальна техніка.
Автоматизація робочого режиму. При підключенні до мережі хоча би однієї дощувальної установки витрата з мережі стає більшою витрати бустер-помпи, тиск падає і, коли він знизиться до заданого значення (точка Б на рис. 15.4, лекція 15), давач тиску пошле сигнал на включення першої робочої помпи і відключення бустер-помпи. При підключенні інших споживачів витрата збільшується і коли вона досягне  витратомір видасть сигнал на включення наступного помпового агрегату, як показано на рис. 15.4, (лекція 15). В подальшому при витратах
витратомір видасть сигнал на включення наступного помпового агрегату, як показано на рис. 15.4, (лекція 15). В подальшому при витратах  включаються в роботу наступні агрегати. При зменшенні витрати помпові агрегати відключаються у зворотному порядку.
включаються в роботу наступні агрегати. При зменшенні витрати помпові агрегати відключаються у зворотному порядку.
Для рівномірного використання ресурсу основних помпових агрегатів використовується принцип селективності включення в залежності від загальної кількості напрацьованих годин і кількості включень кожного з агрегатів.
В даний час системи керування помповими станціями підкачки базуються на використанні мікропроцесорів і давачів з уніфікованими виходами, які дозволяють під'єднувати їх безпосередньо до аналогових чи дискретних входів. Узгодження режимів роботи досягається програмними засобами.
Автоматизація помпових станцій перекачування
Осушувальні і перекачувальні помпові станції, як правило працюють в автоматичному режимі і керуються від відповідних давачів. Вибір керуючих параметрів залежить від призначення станції, особливостей конструкції водозабірної споруди, водоприймального резервуара, характеристик водопровідної мережі, зокрема, допустимих швидкостей водяних потоків та інших чинників.
Типовим алгоритмом керування осушувальних помпових станцій є керування за рівнем води у водозабірному басейні, який контролюється багатопозиційним релейним давачем рівня. На рис. 16.3 показана діаграма роботи чотирипозиційного давача рівня ДР, який керує трьома помповими агрегатами осушувальної помпової станції і сигналізує про аварійний рівень. Багатопозиційний давач може бути поплавковим з чотирма виходами ДР1, ДР2, ДР3 і ДР4, або електродним з чотирма ізольованими між собою електродами, рознесеними по висоті.
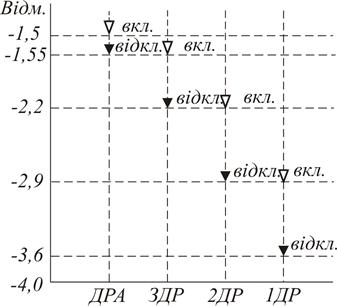
Рис. 16.3. Діаграма роботи давачів рівня
Сигнал на включення першого помпового агрегату подається з першого виходу давача при рівні води у басейні, наприклад, 2,9 м.
При підвищенні рівня до 2,2 м з виходу ДР2 подається сигнал на включення другого помпового агрегату. На відмітці 1,55 м подається сигнал на включення третього помпового агрегату. Якщо рівень досягає аварійної оцінки – 1,5 м, що грозить затопленню помпової станції (наприклад, під час повіддя), з аварійного виходу давача ДРА надходить сигнал на відключення аварійної сигналізації і передачу його системою телемеханіки диспетчеру.
Відключення помпових агрегатів відбувається у зворотній послідовності при зниженні рівня до відповідних відміток, які контролюються давачем рівня, як показано на рис. 16.3. При керуванні помповою станцією за розглянутим алгоритмом кількість годин роботи кожного агрегату за визначений проміжок часу різний. Агрегат, що керується виходом ДР1, працює найбільше, а третій – найменше. З метою рівномірного зносу помпових агрегатів черговість їх включення здійснюється лічильником кількості включень, або лічильником наробітку кількості годин, за сигналами яких змінюється нумерація помпових агрегатів, тобто переключення на роботу з іншими виходами давача рівня.
Автоматизація перекачувальних помпових станцій на відміну від осушувальних здійснюється за рівнем води у верхньому б’єфі каналу. При цьому додатково передбачається відключення помп при зниженні рівня у водозаборі до мінімально допустимого значення.
Автоматизація помпових станцій перекачування з урахуванням режиму роботи каналу
Помпові станції перекачування (машинне водопідключення) подають воду з нижнього б’єфа у верхній. Керування ними здійснюють, як і осушувальними помповими станціями, за рівнем води, але немає потреби весь час підтримувати баланс між подачею і витратою. Це зумовлено властивістю б’єфів накопичувати воду у резервних ємностях, що дозволяє дискретне регулювання подачі води. Але при дискретному регулюванні подачі у б’єфах каналів виникають неусталені процеси, під час яких виникають позитивні і від’ємні хвилі. Позитивні хвилі при недостатній висоті сухої частини брівок каналу можуть призводити до переливу через них, негативні – до кавітації в помпових агрегатах.
За цих умов визначається допустимий діапазон коливання рівня у б’єфі як в усталеному режимі, так і в перехідних процесах. Допустимі межі зміни рівня визначають параметри регулювання – крок дискретності, тобто величину зміни витрати  , рівну продуктивності одного помпового агрегату; уставки давачів рівня, за сигналами яких включаються помпи; кількість помпових агрегатів та
, рівну продуктивності одного помпового агрегату; уставки давачів рівня, за сигналами яких включаються помпи; кількість помпових агрегатів та
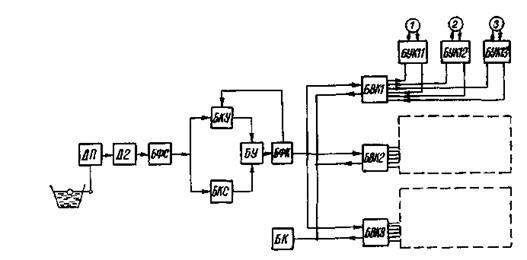
Рис. 16.4. Структурна схема керування помповою станцією з урахуванням режиму роботи б’єфу.
структуру систем керування. Крім того, алгоритм і система керування повинні враховувати межі допустимих швидкостей води у б’єфі, при яких не відбуваються замулення і руйнування укосів.
Структурна схема автоматичного керування перекачувальною помповою станцією, що враховує ці технологічні вимоги, представлена на рис. 16.4. Вона реалізує алгоритм керування за рівнем води у б’єфі і за швидкістю його зміни, тобто за похідною. Схема поділяється на дві частини: логічну і виконавчу. Логічна здійснює контроль рівня у б’єфі і визначає його похідну за часом, порівнює виміряний рівень із заданим, обчислює величину витрати, на яку необхідно змінити подачу і формує команди керування помповими агрегатами. Виконавча за сигналами, що надходить з логічної, забезпечує виконання команд з врахуванням технологічних вимог, що забезпечують рівномірне напрацювання усіх помпових агрегатів, автоматичне включення резервних при відмові робочих, контроль і захист працюючих агрегатів.
Рівень у б’єфі вимірює поплавковий давач ДП з уніфікованим аналоговим виходом, який надходить в мікропроцесор МП. В мікропроцесорі здійснюється порівняння заданого рівня з фактичним, обчислення швидкості зміни рівня і виробляються сигнали на керування помповими агрегатами з врахуванням фактичного часу напрацювання кожним із них.
У виконавчу частину входять станції керування двигунами помп і пристрої, які дозволяють розкодовувати інформацію, яка поступає від мікропроцесора, і передавати дані про стан помпових агрегатів у мікропроцесор.
Система керування передбачає керування помповою станцією за допомогою комп’ютера і відображення на дисплеї її роботи. Інформація про роботу станції може передаватись на центральний диспетчерський пункт керування зрошувальною системою, бо помпова станція є одним з елементів цієї системи.
Читайте також:
- Active-HDL як сучасна система автоматизованого проектування ВІС.
- I. Органи і системи, що забезпечують функцію виділення
- I. Особливості аферентних і еферентних шляхів вегетативного і соматичного відділів нервової системи
- II. Анатомічний склад лімфатичної системи
- II. Бреттон-Вудська система (створена в 1944 р.)
- II. Вимоги безпеки праці перед початком роботи
- III етап. Системний підхід
- IV. Розподіл нервової системи
- IV. Система зв’язків всередині центральної нервової системи
- IV. УЗАГАЛЬНЕННЯ І СИСТЕМАТИЗАЦІЯ ВИВЧЕНОГО
- IV. Філогенез кровоносної системи
- OSI - Базова Еталонна модель взаємодії відкритих систем
| <== попередня сторінка | | | наступна сторінка ==> |
| Автоматичне регулювання витрати помпових станцій | | | ЛЕКЦІЯ №2 |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |