РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
ЛЕКЦІЯ №2
Задачі курсу. Основні поняття і визначення. Основні принципи побудови систем автоматичного керування та їх структурні схеми. Принцип керування за відхиленням, за збуренням та системи комбінованого керування. Класифікація систем за інформаційними ознаками, принципи їх побудови і сфера застосування. Види інформації. Звичайні системи автоматичного керування. Системи з адаптацією. Автоматизовані системи управління.
ЛЕКЦІЯ №1
ТЕМА: "ОСНОВНІ ПОНЯТТЯ І ВИЗНАЧЕННЯ"
Задачі курсу
Сучасні меліоративні системи повинні забезпечувати потреби рослин у воді і не допускати її непродуктивного скидання, що можна досягти за рахунок надійної системи керування процесами руху води від джерела до кореневмісного шару ґрунту. Керувати цими процесами можна на основі достовірної інформації про вологість ґрунту, знання законів руху води в ґрунті і в транспортуючій мережі, а також маючи дані про кількість опадів.
Збір, обробка і використання цієї інформації для оперативного керування великим числом об'єктів, розосереджених на значній території, все частіше передається засобам автоматики і телемеханіки.
В результаті вивчення даного курсу студент повинен:
- знати: принципи побудови і роботи автоматизованих систем керування, сучасні засоби отримання первинної інформації та використання її для контролю і регулювання виробничих процесів в гідромеліорації;
- вміти: самостійно здійснювати вибір технічних засобів автоматизації, будувати структурні та функціональні схеми з використанням цих засобів.
Використовуючи раціональні методи водорозподілу і контролю процесу зволоження або осушення, одержувати економію коштів як при будівництві, так і при експлуатації. Крім того, знаючи засоби і можливості автоматики, інженер-гідротехнік зможе правильно ставити задачі фахівцям з автоматизації технологічних процесів.
Основні поняття і визначення
У навколишньому світі ми постійно спостерігаємо різні процеси керування: від найпростіших до досить складних. Вони зустрічаються практично у всіх сферах діяльності людини. Ранком, займаючись гімнастикою, підсвідомо керуємо рухом свого тіла, на вулицях водії керують різними засобами транспорту, на виробництві фахівці керують верстатами і машинами, технологічними й іншими процесами. Таким чином, керування являє собою таку форму організації процесу, що забезпечує досягнення заданої мети.
У всіх процесах керування можна виділити об'єкт керування і засоби керування, сукупність яких утворює систему керування. Об'єктами керування можуть бути дощувальна машина, помпова станція, меліороване поле, будівельна організація тощо. У техніці під об'єктом керування розуміють сукупність технічних засобів, споруд і інших пристроїв, в яких протікають керовані процеси. Фізичні величини, що кількісно визначають керований процес, називаються параметрами керування або вихідними величинами.
Засоби керування забезпечують бажане протікання процесів в об'єкті. Щоб краще зрозуміти механізм керування, розглянемо, наприклад, процес керування автомобілем. Водій, знаючи, куди треба їхати, і спостерігаючи, куди рухається автомобіль (об'єкт керування), з врахуванням правил дорожнього руху й обстановки на дорозі (перешкоди) приймає рішення змінити напрямок руху або швидкість і відповідно повертає кермо або змінює подачу палива у двигун. В цьому процесі можна виділити наступні основні елементи. По-перше, водій має інформацію, куди необхідно вести машину, тобто інформацією про мету керування. По-друге, спостерігаючи за рухом машини, він одержує інформацію про результати керування. По-третє, на основі отриманої інформації і знаючи мету керування, приймає рішення про необхідні керуючі впливи. По-четверте, виконує прийняте рішення. Ці чотири елементи складають основу керування. Їх можна знайти у більшості процесів керування. Якщо виключити хоча б один з цих елементів, керування об'єктом, на який впливають завади, що заважають досягненню заданої мети, стане неможливим.
Отже, керування будь-яким об'єктом при наявності завад складається з чотирьох елементів: наявності інформації про мету керування, одержання інформації про результати керування, вироблення рішення на основі аналізу отриманоїінформації і виконання прийнятогорішення. Тому система керування повинна мати джерела інформації про мету і результати керування, засоби, що аналізують інформацію і виробляють впливи, і виконавчі пристрої. Якщо функції окремих елементів виконує оператор, то система керування називається автоматизованою. При цьому ступінь автоматизації визначається кількістю функцій, виконуваних оператором. Чим їх менше, тим ступінь автоматизації вище. Якщо функції всіх елементів системи керування виконують технічні пристрої, то така система керування називається автоматичною системою керування.
Характерною рисою науково-технічного прогресу є підвищення інтенсивності виробничих процесів. Це вимагає не тільки повної механізації, тобто заміни мускульної праці машинами і механізмами, але й автоматизації виробничих процесів. Мета автоматизації - підвищення продуктивності праці і поліпшення якості продукції або роботи за рахунок звільнення людини від оперативного керування механізмами і машинами, виконання обчислень і інших операцій, зв'язаних з керуванням.
У залежності від ступеня участі людини в керуванні технологічним виробничим процесом розрізняють частковуі комплексну автоматизацію. При частковій автоматизації частину операцій виконує людина, а частину – технічні пристрої, які називають засобами автоматизації. Наприклад, при частковій автоматизації водорозподілу на зрошувальних системах гідротехнічні споруди обладнуються засобами місцевої автоматизації - автоматичними регуляторами для стабілізації регульованих параметрів (рівнів, витрат тощо), і контрольно-вимірювальними приладами. При змінах режиму водорозподілу інформація надходить на диспетчерський пункт, звідкіля команди керування (по телефону або посильним) передаються лінійному персоналу, який змінює режими роботи засобів місцевої автоматизації.
Для комплексної автоматизації характерно те, що всі операції з керування виконуються без участі людини. При комплексній автоматизації в обов'язки людини входять лише налагодження засобів автоматизації, їх вмикання і періодичний контроль за їх роботою.
Для забезпечення раціонального керування складним об'єктом (меліоративною системою, заводом, великим будівництвом тощо.) необхідно в обмежений час аналізувати великий обсяг інформації, що надходить, порівнювати безліч можливих варіантів, що стає вже не під силу одній людині або групі людей. У цьому випадку застосовують автоматизовані системи керування(АСК), що являють собою сукупність економіко-математичних методів, технічнихзасобів(ЕОМ, засобів зв'язку, пристроїв відображення інформації тощо.) і організаційних комплексів, що забезпечують керування об'єктом відповідно до заданої мети.
Центральне місце в АСК належить ЕОМ, яка відповідно до заданого алгоритму переробляє інформацію, що надходить, і видає рекомендації з найбільш ефективного керування об'єктм. Оператор відповідно до цих рекомендацій приймає рішення і формує команди керування.
Замінивши роботу оператора керуючою машиною (комп’ютером), здійснюють повну автоматизацію(вища форма керування). Якщо об'єктом керування є технологічний процес, то говорять про автоматичну систему управління технологічнимпроцесом(АСУТП).
Вибір ступеня автоматизації гідромеліоративних об'єктів роблять на основі техніко-економічного обґрунтування. При виборі способів і засобів регулювання водорозподілом на зрошувальних системах потрібно користуватися відповідним посібником з проектування автоматизації водорозподілу на зрошувальних системах Державного комітету з водного господарства України та іншими нормативними документами. При цьому варто враховувати, що найбільша ефективність досягається у тому випадку, коли автоматизується весь технологічний процес. Так, автоматизація зрошувальної системи повинна охоплювати водорозподіл, полив, вертикальний і горизонтальний дренажі і інші процеси, що вимагає створення АСУТП.
Основні принципи керування
На прикладі керування автомобілем ми показали, що система керування складається з об'єкта керування, джерела інформації про мету керування, джерела інформації про результати керування, пристрою, що виробляє керуючі впливи на основі аналізу інформації про мету і результати керування, та виконавчих пристроїв. На рис.1.1. наведена функціональна схема автоматичної системи, що містить ці елементи. Стрілки показують напрямок передачі інформації і керуючих впливів (сигналів керування).

Рис. 1.1. Функціональна схема системи автоматичного керування.
Як бачимо (рис 1.1.), інформація про мету і результати керування надходить до пристрою аналізу інформації і вироблення керуючих впливів. Очевидно, що її носії повинні мати однакову фізичну природу. Як джерела інформації про результати керування служать різні вимірювальні перетворювачі, які перетворять фізичні величини, що характеризують стан об'єкта керування, у сигнали вимірювальної інформації, зручні для передачі й обробки. Наприклад, у системі регулювання рівня води у б'єфі каналу джерелом інформації є рівнемір, що перетворює значення рівня води в пропорційне значення електричної напруги. У цьому випадку і ціль керування (необхідне значення рівня води в б'єфі) також задається у виді електричної напруги.
В найпростіших системах керування аналіз інформації зводиться до порівняння сигналів, пропорційних заданому і дійсному значенням параметрів керування. Різниця між заданим і дійсним значеннями кожного параметра формується у виді сигналів керування, що надходять на виконавчі пристрої, які змінюють надходження в об'єкт енергії або речовини таким чином, щоб зменшити відхилення фактичних значень параметрів керування від заданих.
Такий принцип керування називається керуванням завідхиленням.Особливість його полягає в тому, що керуючий вплив залежить не тільки від мети, але і результатів керування. Виходить, що причина, яка обумовила зміну стану об'єкта, залежить від того, який результат вона викликає. Такий зв'язок причини і наслідку називається зворотним зв'язком. Тому системи керування за відхиленням називають також системами керування зі зворотнимвід’ємним зв'язком, або системами зі зворотним зв'язком.
Зворотний зв'язок замикає ланки передачі впливів від елемента до елемента (рис.1.1), тому системи зі зворотним зв'язком називаються замкненими системами керування.
У ряді випадків мета керування - забезпечення незмінності деякої фізичної величини, що характеризує керований процес (наприклад, рівень води у каналі, тиск води у трубопроводі тощо). Такий окремий випадок керування називається регулюванням. Сукупність засобів, за допомогою яких здійснюється регулювання, називається автоматичним регулятором. Регулятор і об'єкт регулювання утворять систему автоматичного регулювання.
Принцип керування за відхиленням лежить в основі переважної більшості автоматичних систем. Як приклад, розглянемо найпростішу замкнену систему автоматичного регулювання рівня води у резервуарі (рис. 1.2,а). Об'єкт регулювання в цій системі - резервуар 6, у який надходить вода по трубопроводу 1 і витікає по трубопроводу 7, а регульованим параметром є рівень води. Необхідне значення рівня (мета регулювання) задається переміщенням штанги 4, на якій укріплений поплавок 5, відносно важеля 3. Поплавок є вимірювальним пристроєм і перетворює відхилення рівня від заданого значення в переміщення важеля 3. Важіль 3 зв'язаний з виконавчим органом (клапаном 2) таким чином, що при підвищенні рівня клапан закривається, а при зниженні - відкривається. В результаті при зміні рівня змінюється надходження води в резервуар і рівень автоматично підтримується сталим незалежно від того, які причини викликали його зміну. У цьому полягає основна перевага регулювання за відхиленням.
Крім керуючих впливів, на будь-який объект керування діють різні збурюючі фактори, що протидіють нормальному протіканню процесу. Ці фактори прийнято називатизбурюючими впливами.

Рис. 1.2. Системи автоматичного регулювання рівня води у резервуарі: а - за відхиленням; б - за збуренням; в - комбінована.
При керуванні за відхиленням виникає деяке запізнення дії сигналів керування відносно збурюючих впливів. В окремих випадках це запізнення настільки велике, що нормальна робота системи стає неможливою. Щоб усунути цей недолік, використовують принцип керування за збуренням
Керування за збуренням полягає в тому, що сигнали керування виробляються в залежності від збурюючих впливів, які спричиняють відхилення керованих параметрів від заданих значень. У системах, побудованих за цим принципом, джерело інформації про результати керування заміняється джерелом інформації про збурюючі впливи. Звичайно, вибирають основні збурюючі впливи на об'єкт і за ними здійснюють керування. Стосовно до розглянутого прикладу основним збурюючим впливом є витрата, зміна якої призводить до зміни рівня води в резервуарі.
На рис.1.2,бнаведена система регулювання за збуренням. Вона відрізняється від системи регулювання за відхиленням тим, що замість давача рівня застосований давач витрати. У цій системі при збільшенні витрати тиск перед діафрагмою збільшується і мембрана 5піднімається вверх, важіль 3повертається і клапан 2відкривається, збільшуючи приплив води в резервуар 6. При зменшенні витрати клапан закривається. Підбором плечей важеля 3 можна домогтися балансу між кількістю води, що витікає з резервуара і надходить до нього, і у такий спосіб підтримувати сталим рівень води.
З розглянутого прикладу випливає, що система керування за збуренням має ту позитивну властивість, що вплив на виконавчий пристрій відбувається без усякого запізнення стосовно впливу, що збурює, тобто до того моменту, коли починає помітно змінюватися керований параметр об'єкта. У такий спосіб досягається висока швидкодія системи.
Основним недоліком систем керування за збуренням є те, що вони не реагують на дії другорядних збурень, які називають завадами, а дія завад призводить до того, що керовані параметри поступово відхиляються від необхідних значень. Тому керування за збуренням застосовують дуже рідко.
Використовуючи обидва принципи, одержують систему комбінованого керування. Комбіновані системи поєднують у собі переваги керування за відхиленням і за збуренням. Вони мають високу швидкодію і велику точність керування.
Прикладом комбінованої системи регулювання може служити система, зображена на рис.1.2,в. У ній керуючий вплив (переміщення клапана 2) залежить від витрати і рівня води. При зміні витрати відразу змінюється положення клапана. Якщо через неточність регулювання за витратою або дії другорядних факторів, наприклад, зміна тиску в трубопроводі 1, рівень починає змінюватися, то поплавок 5 впливає через важіль 3на клапан 2таким чином, що відхилення рівня від заданого стає мінімальним.
Комбіновані системи керування застосовують для регулювання рівнів води в б'єфах каналу, частоти обертання двигунів і інших параметрів, де потрібні високі точність і швидкодія.
Якісні і кількісні характеристики багатьох складних машин і виробничих процесів залежать від великого числа перемінних, котрі впливають один на одного. Якщо вони є об'єктами регулювання, то їх називають багатозв’язаними. Прикладами об'єктів багатозв’язаного регулювання можуть служити синхронний генератор, у якому регулюються напруга і частота змінного струму, ґрунт у теплиці, де регулюються температура і вологість, тощо.У цих об'єктах зв'язок між регульованими величинами обумовлений властивостями об'єкта регулювання. Інша група об'єктів багатозв’язаного регулювання - це технологічні процеси, у яких взаємозв'язок між різними величинами зумовлений рухом речовини. Прикладом такого об'єкта є магістральний канал, розділений перегороджуючими спорудами на кілька б'єфів.
Якщо по кожній змінній (регульованій величині) створити замкнені, системи регулювання, то в цілому вийде багатозв’язана система. Системами багатозв’язаногорегулювання прийнято називати системи автоматичного регулювання, у яких є декілька регульованих величин, зв'язаних міжсобою таким чином, що зміна будь-якої з них викликає зміну інших, якщо не передбачені спеціальні засоби, що компенсують цей взаємозв'язок. Якщо, наприклад, у всіх нижніх б'єфах каналу автоматично підтримувати необхідні значення рівнів води, то при зміні витрати в одному з б'єфів будуть мінятися рівні у всіх вищерозташованих б'єфах і відбудеться перебудова роботи відповідних регуляторів.
Системи багатозв’язаного регулювання призначені вирішувати три основні задачі: а) автономності регулювання взаємозалежних величин; б) підтримки необхідного співвідношення між різними величинами; в) зв'язаного регулювання, що забезпечує максимум заданого показника якості. Уже розроблена теорія систем багатозв’язного регулювання, яка дозволяє вирішувати зазначені задачі.
Класифікація систем автоматичного керування
Види інформації
Класифікація завжди базується на певних ознаках. Процеси керування незалежно від того чи відбуваються вони в живих організмах чи в машинах, зв'язані з одержанням, передачею і використанням інформації. Тому найбільше загальною класифікаційною ознакою є інформація, яку використовують при керуванні.
Інформацією називається будь-яка сукупність повідомлень,первинним джерелом яких є дослід.Інформація, яка використовується для побудови і функціонування систем автоматичного керування, як відомо, поділяється на два види: початкову, або апріорну інформацію, а також робочу інформацію.
Початкова інформаціяявляє собою сукупність даних про об'єкт керування і засобах керування, необхідних для створення і функціювання системи автоматичного керування. Так, для побудови системи автоматичного регулювання рівня води в резервуарі необхідно знати геометричні розміри резервуара, межі зміни витрати, тиску в живильному трубопроводі й інші дані. Ці дані і складають початкову інформацію.
Кількість початкової інформації, яка необхідна для побудови і функціонування системи керування, називається повною початковою інформацією. Якщо кількість початкової інформації про керований процес складає лише частина необхідної, то таку інформацію називають неповною.
Робочою інформацієюназивається сукупність даних про дійсний стан керованого процесу в будь-який момент часу. Її одержують за допомогою вимірювальних пристроїв і вона передається у виді сигналів-носіїв інформації. Фізична природа сигналів може бути різноманою: електромагнітною, механічною, тепловою, гідравлічною й ін. При цьому в одній системі керування може відбуватися багаторазове перетворення виду сигналів. Для розкриття поняття інформації наведемо два приклади.
У системі регулювання рівня за відхиленням (рис.1.2,а) робочою інформацією є відхилення рівня води в резервуарі від заданого. У системі регулювання за збуренням (рис.1.2,б) робочою інформацією є збурення.
Кількість початкової і робочої інформації, яка використовується в системі керування, визначає якість її роботи. Чим її більше, тим краще працює автоматична система. Наприклад, у комбінованій системі регулювання, наведеної на рис.1.2,в , початкової і робочої інформації більше, ніж у системі регулювання за відхиленням або збуренням. Тому комбінована система регулювання більш швидкодіюча і має більш високу точність регулювання.
У залежності від кількості початкової інформації, яка використовується для побудови і функціонування системи керування, усі системи автоматичного керування поділяють на звичайні системи, системи з адаптацією й АСУ (рис.1.3).

Рис.1.3. Класифікація систем автоматичного керування.
Звичайні системи автоматичного керування
До них відносять системи, що вимагають для побудови і функціонування повної початкової інформації. Системи цього класу найбільше прості і вони дуже широко застосовуються.
За видом робочої інформації звичайні системи поділяються на замкнені і розімкнені системи автоматичного керування.

Рис. 1.4. Структурна схема замкнутої системи автоматичного керування
У замкнених системахвикористовується керування за відхиленням і робочою інформацією є відхилення регульованого параметра від необхідного значення. Крім того, у них є замкнений контур передачі робочої інформації. На рис.1.4 показана структурна схема замкненої системи автоматичного керування. Вона відрізняється від схеми, зображеної на рис.1.1, тим, що джерело інформації про мету керування представлено вхідним сигналом (задаючим впливом) хвх, пристрій аналізу інформації і вироблення керуючого впливу представлений суматором – колом, розділеним на сектори. Зачернений сектор означає, що хзз віднімається з хвхтому і керуючий вплив
Δх=хвх-хзз. /1.1/
Замкнений контур передачі робочої інформації складають наступні елементи: вимірювальний пристрій – суматор - підсилювач - виконавчий пристрій - об'єкт керування - вимірювальний пристрій. Системи автоматичного керування, що мають один замкнений контур, називаються одноконтурними. Системи, що складаються з декількох замкнених контурів, називаються багатоконтурними.
В залежності від способу формування вхідного сигналу хвх замкнені системи поділяють на три види: системи автоматичного регулювання, системи програмного керування і слідкуючі системи.
В системах автоматичного регулювання хвх=const, і регульована величина підтримується сталою. Тому системи регулювання часто називають стабілізуючими і вони складаються з об'єкта регулювання і регулятора.
Якщо до складу регулятора не входить підсилювач, то він називається регулятором прямої дії.У таких регуляторах енергія вимірювального пристрою використовується для керування виконавчим органом. Наприклад, в регуляторі рівня води в резервуарі (рис.1.2,а) вимірювальний пристрій - поплавок переміщує виконавчий орган - клапан. Точність регулювання в таких системах низька.
Щоб підвищити точність регулювання, керуючий сигнал підсилюється підсилювачем потужності до значення, необхідного для керування виконавчим пристроєм. Регулятор, що містить підсилювач, називається регулятором непрямоїдії.
Системи, у яких вхідний сигнал хвх - задана функція часу, називають системами програмного керування. Вихідна величина хвих у них також є заданою функцією часу. Основним джерелом інформації служить програма керування, зафіксована спеціальними пристроями - програмоносіями. Системи, у яких програма керування представлена послідовністю чисел, зафіксованих на магнітних дисках чи інших носіях, називаються системами з цифровим програмним керуванням.
Якщо вхідний сигнал хвх змінюється в заданих межах довільно, заздалегідь невідомим чином, то такі системи називаються слідкуючими системами. Вони забезпечують стеження однієї частини машини, приладу або споруди за іншою частиною. Наприклад, погоджений рух секцій дощувальних машин досягається за допомогою слідкуючих систем.
У розімкнутих системах автоматичного керування робочою інформацією є вхідний або збурюючий вплив. У них немає засобів контролю стану об'єкта керування і вони можуть нормально функціонувати тільки при відсутності завад. Дані системи поділяються на дві групи: системи керування за збуренням і розімкнені системи програмного керування,У системах керування за збуренням забезпечується компенсація основних збурень і тому їх називають також системами з компенсацією. Розімкнені системи програмного керування виконують задану послідовність операцій, яка не залежать від отриманого результату. Прикладом такої системи може служити система програмного керування поливом декількох ділянок поля в заданій послідовності і заданими нормами поливу. При цьому вплив зміни тиску в магістральному трубопроводі, випаровування й інші фактори не враховується, що призводить до відхилення фактичної норми поливу від заданої. Тому розімкнені системи програмного керування не знаходять широкого застосування.
Системи з адаптацією
Другий клас систем автоматичного керування складають системи з адаптацією, які не вимагають для побудови і функціонування повної початкової інформації. У цих системах мета керування задається у виді деякого критерію якості, наприклад, мінімуму витрати енергії, максимуму продуктивності тощо, при непередбачених змінах властивостей керованого об'єкта й умов навколишнього середовища. Адаптація (пристосування) тут полягає у тому, що системи реагують на ці зміни і перебудовують свою роботу таким чином, щоб забезпечити заданий критерій якості. При цьому дії по керуванню поєднуються з безперервними або періодичними випробуваннями об'єкта, які дають додаткову робочу інформацію взамін недостатньої початкової.
Найпростішим видом адаптивної системи є система екстремального керування. Показник якості роботи об'єкта може приймати різні значення в залежності від регулюючих впливів, зовнішніх збурювань і інших факторів. Тому робота об'єкта керування повинна протікати так, щоб значення показника якості було максимальним.
|
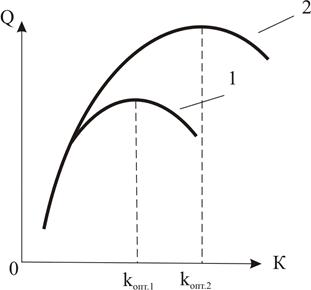
Об'єктом екстремального керування, наприклад, є, землесосний снаряд, призначений для виконання днопоглиблювальних робіт, намиву дамб, гребель тощо. Оптимальний режим його роботи відповідає максимальній витраті твердої фази гідросуміші.
Екстремальний характер залежності продуктивності земснаряда від консистенції пульпи зумовлений тим (рис.1.5), що при збільшенні консистенції витрата ґрунту спочатку зростає до максимального значення, а потім зменшується через зменшення витрати пульпи.
Консистенція, що відповідає максимальної продуктивності, називається оптимальною. Вона залежить від розмірів часток, питомої ваги і природного залягання ґрунту, а також від розмірів пульпопровода й інших факторів, що змінюються в процесі роботи. Тому система керування земснарядом повинна за допомогою спеціальних пристроїв знаходити оптимальну консистенцію, щоб підтримувати максимальну продуктивність при непередбаченій дії зовнішніх збурень. Це досягається за рахунок зміни глибини занурення всмоктувального пристрою і швидкості його подачі.
Автоматизовані системи керування
Особливий клас системи керування складають автоматизовані системи керування складними об'єктами. АСУ являє собою людино-машинну систему, що забезпечує автоматизоване збирання і оброблення інформації, необхідної для оптимізації керування. Для функціонування АСУ потрібно найменшу у порівнянні з іншими класами систем керування кількість початкової інформації. Недостача початкової інформації поповнюється в системі за рахунок того, що ЕОМ розраховує багато варіантів можливих рішень, порівнює їх і вибирає оптимальний.
У даний час АСУ успішно застосовуються для керування водорозподіленням на Каховській зрошувальній системі, Саратовському водогосподарчому комплексі, каналі Прованс (Франція) і на інших системах.
Крім розглянутої класифікації систем автоматичного керування за інформаційною ознакою, існує розподіл систем за функціональним призначенням. За цією ознакою розрізняють системи регулювання температури, тиску, рівня, витрати, швидкості, потужності, напруги тощо.
Відповідно до виду використовуваної енергії системи керування поділяються на електричні, механічні, гідравлічні, пневматичні, електрогідравлічні й інші.
За способом формування сигналів керування розрізняють безперервні і дискретні системи. В безперервних системах сигнали керування передаються у виді безперервних величин. В дискретних сигнали керування дискретні за часом або за рівнем. Якщо дискретність здійснюється тільки за часом, то системи називаються імпульсними. Системи, у яких сигнали керування дискретні за рівнем, називаються релейними або позиційними.
В теорії автоматичного керування важливе значення має поділ систем на лінійній нелінійні, стаціонарні і нестаціонарні.
Лінійниминазиваються системи, перетворення сигналів керування в яких описуються лінійними рівняннями (алгебраїчними, диференціальними, інтегральними й ін.). Якщо хоча б в одному елементі відбувається нелінійне, наприклад, дискретне перетворення сигналу, то система називається нелінійною.
Системи з незмінними в часі параметрами називаються стаціонарними.Лінійні стаціонарні системи описуються лінійними рівняннями зі сталими коефіцієнтами.
Системи з параметрами, що змінюються в часі, називаютьсянестаціонарними.Лінійні нестаціонарні системи описуються лінійними рівняннями зі змінними коефіцієнтами.
ТЕМА: "ОБ'ЄКТИ КЕРУВАННЯ, ЇХ МАТЕМАТИЧНІ МОДЕЛІ"
Читайте також:
- Вид заняття: лекція
- Вид заняття: лекція
- Вид заняття: лекція
- Вид заняття: лекція
- Вид заняття: лекція
- Вступна лекція
- Вступна лекція 1. Методологічні аспекти технічного регулювання у
- Клітинна селекція рослин.
- Колекція фонограм з голосами осіб, які анонімно повідомляли про загрозу вибуху
- ЛЕКЦІЯ (4): Мануфактурний період світової економіки
- Лекція - Геополітика держави на міжнародній арені
- Лекція 02.04.2013
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |