РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Приклад моделі організації, побудованої методами теорії регулювання-за П.Ерпші-Каякобу)
В якості моделі приводиться система лінійного двопараметричного регулювання з ієрархічною структурою (рис. 11.13).
Таблиця 11.3 - Еквівалентні елементи систем регулювання і організації
| Система регулювання | Організація |
| Регулятор | Суб'єкт рішення (адміністратор, керівник, група). |
| Автономний регулятор | Керівник, координатор, група координації |
| Об'єкт регулювання | Процес, що підлягає регулюванню (цех, відділ, підприємство і т.д.) |
| Вимірювання, зворотний зв'язок, порівняння заданої величини з фактичною | Контроль, зіставлення мети з досягнутим станом |
| Вплив, що задається | Цільова функція, плановий показник. |
| Регульована величина, фактичне значення | Величина, що підлягає регулюванню, фактичне значення показника |
| Керуючий вплив | Розпорядження, наказ, стимул |
| Функція агрегації | Ущільнення даних, стиснення інформації |
| Функція дезагрегування | Розподіл завдання по виконавцях. |
| Коефіцієнт посилення регулятора (П-регулятор) | Право ухвалювати рішення з урахуванням можливості їх виконання |
| Децентралізація посилення регулятора | Делегування повноважень ухвалювати рішення |
| Рівномірний розподіл посилень регулятора | Надання права ухвалювати рішення |
| Резервування (паралельне включення елементів) | Бажане або небажане дублювання |
| Ієрархічно-збиткове роз'єднання | Горизонтальна координація |
| Стійкість (лінійні системи) | Працездатність організації (можливість компенсації з часом виникаючих перешкод) |
| Нестійкість (лінійні системи) | Непрацездатність організації {лавиноподібне наростання перешкод) |
| Інтеграл від квадратичної помилки | Ступінь досягнення мети організації (максимальне досягнення мети при мінімальному значенні інтеграла від квадратичного відхилення) |
В термінах теорії регулювання система була представлена «головним регулятором» R11(S), якому підлеглі два допоміжні регулятори R211(S) і R212(S). Для об'єкту регулювання були вибрані передавальні функції другого порядку:
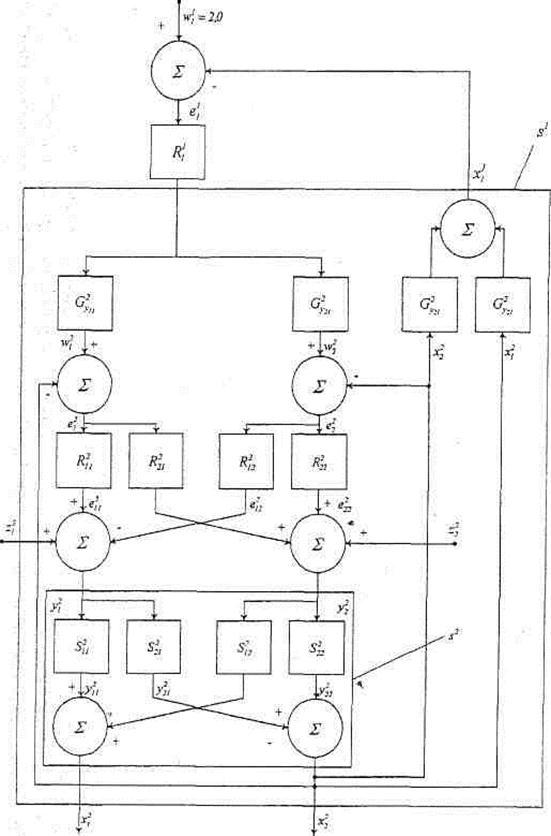
Рисунок 11.13 Представлення складної організації у вигляді системи регулювання
Обертаючи матрицю об'єкту регулювання, отримаємо вирази для матриць автономних регуляторів (всі змінні є функціями оператора Лапласа):
Параметри  і
і  є необхідними перехідними характеристиками регуляторів незв'язаних контурів регулювання.
є необхідними перехідними характеристиками регуляторів незв'язаних контурів регулювання.
В цілях простоти вибирається перехідна характеристика пропорційного регулятора (П-регулятора), тобто постійні значення параметрів:

Підставляючи передавальні функції об'єктів регулювання в рівняння для умов розв'язування, одержують наступні передавальні функції для розв'язуючих регуляторів:




Для елементів агрегації і деагрегування була прийнята ланка запізнювання першого порядку.
Всі елементи об'єктів регулювання  (рис. 11.13) можна задати передавальними функціями наступного вигляду (замість SА, SВ, SС потрібно підставити відповідні параметри):
(рис. 11.13) можна задати передавальними функціями наступного вигляду (замість SА, SВ, SС потрібно підставити відповідні параметри):

звідки

або у вигляді диференціального рівняння

Те ж співвідношення у формі інтегрального рівняння матиме вигляд:

Відповідна аналогова модель контура регулювання приведена на рис.11.14.

Рисунок 11.14 Аналогова модель контура регулювання
Модель, приведена на рис. 11.14, програмується як макрофункція, де ІС1; і ІС2 — початкові умови інтеграторів, для імітації варіантів оргструктури.
Представлена модель «механістична», і область її застосування обмежена: з її допомогою можна перевірити ряд гіпотез щодо поведінки реальної системи, структура якої була задана. Такий образ дій характерний для дедуктивного дослідження організаційної системи.
Існує можливість використати індуктивний підхід, тобто побудувати адекватну модель організаційної структури. В цьому випадку можна скористатися методами системної динаміки.
Читайте також:
- А .Маршалл - основоположник неокласичної теорії.
- Абсолютні синоніми (наприклад, власне мовні й запозичені) в одному тексті ділового стилю вживати не рекомендується.
- Автокореляція залишків – це залежність між послідовними значеннями стохастичної складової моделі.
- Аксіоматичний метод у математиці та суть аксіоматичної побудови теорії.
- Акти з охорони праці, що діють в організації, їх склад і структура.
- Алгоритм однофакторного дисперсійного аналізу за Фішером. Приклад
- Алгоритм реалізації моделі
- Алгоритм реалізації моделі
- Алгоритм реалізації моделі
- Алгоритм реалізації моделі
- Алгоритм реалізації моделі
- Алгоритм реалізації моделі
| <== попередня сторінка | | | наступна сторінка ==> |
| Проблемно-орієнтований підхід до розв'язування задачі синтезу організаційної структури | | | РОЗДІЛ 14. Наступність і перспективність навчання дітей рідної мови в дошкільних закладах освіти та першому класі школи. |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |