РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Конструкція рульового керування.
Тема: Рульове керування.
1.Призначення.
Слугує для забезпечення заданого напряму руху автомобіля шляхом роздільного, узгодженого та пропорційного повороту керованих коліс на задані кути. Крім того рульове керування повинно забезпечувати безпеку руху та комфорт керування.
2. Вимоги:
1. Відповідність конструкції вимогам безпеки руху та можливість керування
з використанням автоматичних електронних, локаційних, телематичних
та інших систем керування.
2. Забезпечення високої маневреності шляхом зменшення радіуса повороту
та правильної кінематики повороту автомобіля.
3. Узгодженість, пропорційність та точність дії між кутом повороту рульового колеса та кутами повороту керованих коліс, між зусиллям на рульовому колесі та моментами опору повороту.
4. Забезпечення комфортного керування.
5. Зменшення ( усунення ) зворотної сили при передачі ударів від коліс на рульове колесо та постійна стабілізація керованих коліс.
6. Забезпечення слідкуючої дії, мінімальний час спрацювання, уникнення коливань керованих коліс та можливість керування автомобілем при відмові посилювача чи автоматичної системи керування.
7. Підвищена надійність та довговічність.
8. Забезпечення мінімального зносу бігової доріжки та кочення коліс без бокового ковзання.
9. Простота обслуговування та збільшення пробігу між проведенням обслуговування рульового керування.
10. Уніфікація.
11. Дешевизна та технологічність виготовлення.
3. Класифікація:
1. За типом рульового механізму – рейкові, черв’ячні, гвинтові, комбіновані.
2. За наявністю та типом посилювача рульового керування – з гідравлічним
посилювачем, з електричним посилювачем, без посилювача.
3. За місцем розташування посилювача рульового керування – разом з
рульовим механізмом, окремо від рульового механізму.
4. За конструкцією привода керованих коліс – привод керування передніми колесами, привод керування передніми та задніми колесами, привод керування передніми та середніми колесами, привод керування усіма колесами, з розташуванням рульової трапеції спереду або позаду осі, суцільна або розчленована трапеція, тощо.
5. За способом рульового керування: автоматичне електронне рульове керування, механічне керування, повертанням керованих коліс, складанням ланок рами.
6. За напрямом повертання керованих коліс: в одну сторону, в різні сторони, при повертанні передніх та задніх коліс.
7. За розташуванням рульового колеса: зліва або справа.
1. Рульове колесо.
2. Вал приводу рульового механізму.
3. Рульовий механізм.
4. Рульовий привод керованих коліс.
5. Посилювач рульового керування ( насос з приводом, силовий пристрій, електродвигун з механізмом приводу ).
6. Автоматичні електронні, локаційні, телематичні системи стабілізації руху та керування.

Рис 1. Рейкове рульове керування Toyota з електропідсилювачем.

Рис 2. Схема рульового керування Toyota AURIS COROLLA.

Рис 3. Привод коліс автомобіля Auris Toyota.
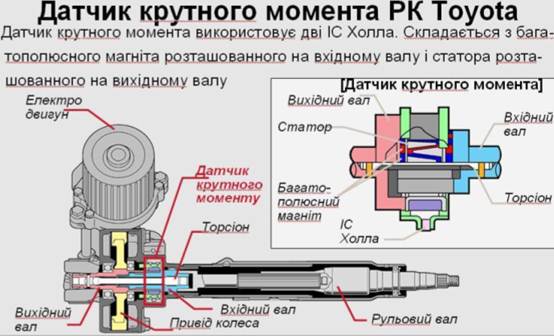
Рис 4. Датчик крутного моменту рульового керування Toyota.

Рис 5. Рейковий рульовий механізм без підсилювача.
1-чехол, 2- вкладиш, 3- пружина, 4- палець,
6- кульовий шарнір, 7- рульова рейка.
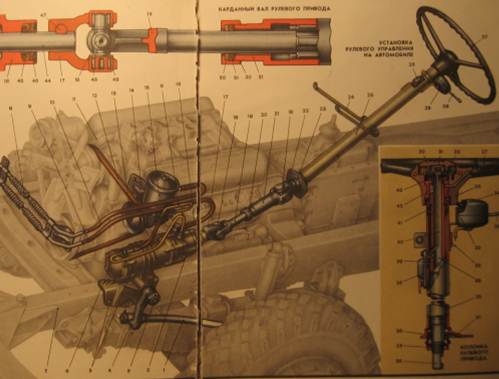
Рис 6. Рульове керування ЗІЛ-131.
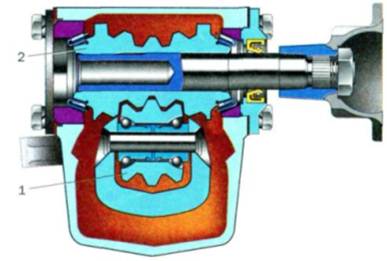
Рис 7. Рульовий механізм типу «глобоїдний
черв’як-ролик » без посилювача.
1- ролик, 2- черв’як.

Рис 8. Рульові механізми типу « гвинт-гайка-рейка –
зубчатий сектор» без посилювача.
1- картер, 2- гвинт з кульовою гайкою, 3- вал-сектор,
4,15- пробки, 5- регулювальні прокладки, 6- вал,
7,10- ущільнювачі, 8- сошка, 9,14- кришки,
11,12,13- кільця.

Рис 8а. Рульові механізми типу « гвинт-гайка-рейка – зубчатий сектор» без посилювача.
1,17- гайка, 2- підшипник, 3,13,14- кільця, 4- гвинт, 5- картер, 6- поршень-рейка, 7- гідравлічний розподільник, 8- манжета, 9- ущільнювач, 10- вхідний вал, 11- вал-сектор, 12,16- кришки, 13,14,15- кільця, 18- болт.

Рис 9. Рульовий привод передніх та задніх керованих коліс.

Рис 10. Способи повороту. а)- за рахунок повороту осі,
б)- за рахунок повороту керованих коліс, в- за рахунок
складання рами, г- силовим способом.
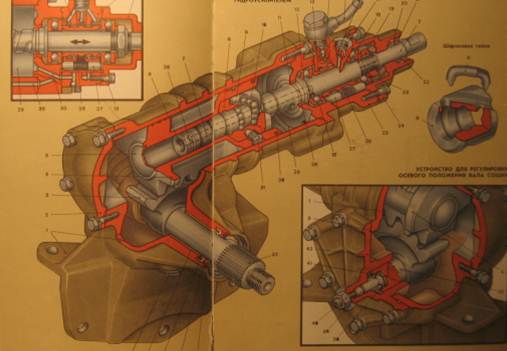
Рис 11. Рульовий механізм ЗІЛ-131 типу “гвинт-гайка-рейка-сектор “.
. 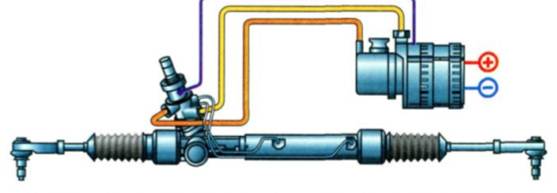
Рис 12. Електрогідравлічний підсилювач рульового керування.
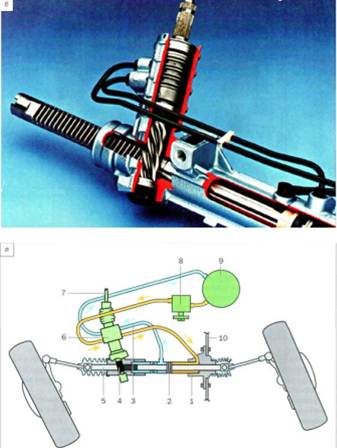
Рис 13. Рейковий рульовий механізм з гідропідсилювачем.
1,2- олива під високим та низьким тиском, 2- поршень, 4- шестерня, 5- рейка, 6- золотниковий пристрій, 7- рульова колонка, 8- насос гідро підсилювача, 9- ємність для оливи, 10 – елемент підвіски.

Рис 14.Електричні підсилювачі з передаванням зусилля на рульовий вал, на
шестерню рульового механізму та на рейку рульового механізму.

Рис 15. Електричний підсилювач рульового керування автомобіля VW.
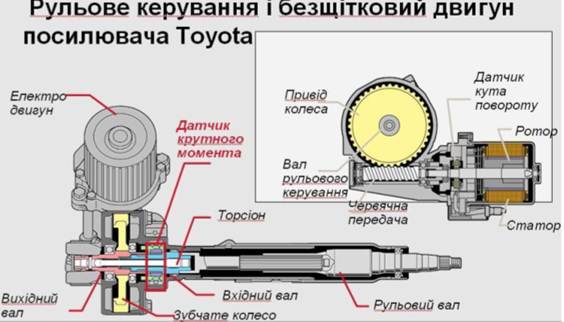
Рис 16. Електричний підсилювач рульового керування Toyota.
Рис 17. Рульове керування автомобіля AXOR з гідро підсилювачем.
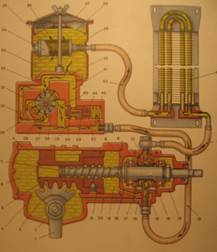
Рис 18. Схема роботи гідро підсилювача ЗІЛ-131.
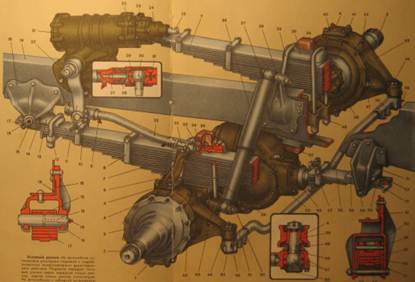
Рис 19. Привод керованих коліс ЗІЛ-131.
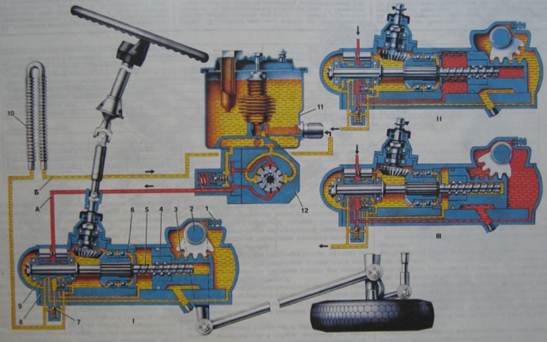
Рис 20. Схема рульового керування КАМАЗ-5320 з гідравлічним
підсилювачем та рульовим механізмом типу “гвинт-гайка-рейка-сектор “.

Рис 21. Електронна система стабілізації траєкторії руху.
ESP.( Electronic Stability Programm ).
1-блок керування АБС, 2- датчик швидкості обертання колеса, 3- датчик кута повороту руля, 4- датчик бокового прискорення та кутової швидкості, 5- електронний блок керування, 6- електропривод керування подачі палива, 7- датчик тиску в гальмівній системі.
На деяких автомобіля БМВ встановлюється активна система керування передніми колесами AFS ( Active Front Steering ). Планується Steer by wire, тобто не буде жорсткого механічного зв’язку між водієм та колесами, а на кожне колесо свій електродвигун повороту колеса.
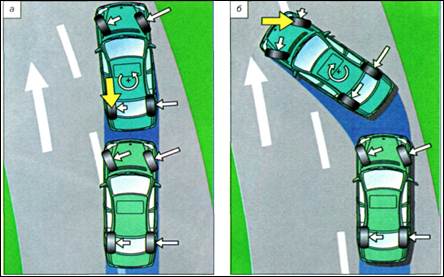
Рис 22. Керування в критичній ситуації. а)- при зносу, б)- при заносу.
Читайте також:
- Автократично-демократичний континуум стилів керування.
- Алгоритмічна конструкція повторення та її різновиди: безумовні цикли, цикли з після умовою та з передумовою.
- Аналіз конструкції рульового керування.
- Будівельні домкрати, їх призначення, класифікація та конструкція.
- Будівельні лебідки, їх призначення, класифікація та конструкція.
- Будівельні підйомники, їх призначення, класифікація та конструкція.
- Використання спеціальних моделей відведення земельних ділянок під будівництво (державно-приватне партнерство, індустріальні парки, реконструкція кварталів застарілої забудови).
- Галузь використання і конструкція автоцементовозів.
- Д/з Сили навантаження та напруги в зварних конструкціях.
- Двомірне трактування стилів керування.
- Джерело шуму , розташовують у кожусі, внутрішні поверхні якого покривають звукопоглинальними матеріалами. Різновидом цього методу є кабіна керування.
- Електропроводкою називається сукупність проводів або кабелів з кріпильними, підтримуючими і захисними конструкціями і деталями, які до них відносяться.
| <== попередня сторінка | | | наступна сторінка ==> |
| Розв’язання. | | | Розрахунок передаточних чисел рульового керування. |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |