РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Автоматизація процесу переміщення твердих матеріалів
У якості об’єкта керування процесом переміщення твердих матеріалів приймемо стрічковий транспортер, що переміщує сипкий матеріал (рис. 22). Показником ефективності цього процесу є витрата транспортуючого матеріалу, а метою керування будемо вважати підтримання заданого значення витрати. У зв’язку з тим що всі збурення на вході в об’єкт (зміна гранулометричного складу матеріалу, його вологості і насипної маси, проковзуючої стрічки транспортера і т.п.) усунути неможливо, витрату матеріалу потрібно прийняти в якості регулюючої величини і регулювати його коректуванням роботи дозуючих пристроїв.
Контролюють витрату переміщуючого матеріалу і кількість споживаючої приводом електроенергії при різкому збільшенні струму електродвигуна транспортера, наприклад, у випадку заклинювання стрічки, повинні спрацювати пристрій сигналізації і захисту. Останні відключають електродвигун.
У зв’язку з можливістю засмічення окремих ділянок транспортної системи сторонніми включеннями (грудками, налипнувши матеріалом) і небезпекою виходу з ладу окремих елементів транспортера контролюється і сигналізується також наявність потоку матеріалу за допомогою спеціального датчика.
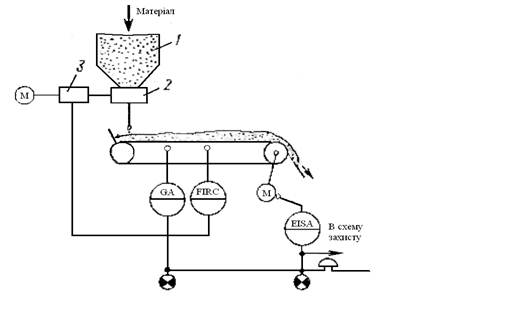
Рис. 22. Типова схема автоматизації процесу переміщення сипких матеріалів:
1 – бункер; 2 – дозатор; 3 - варіатор; 4 – стрічковий транспортер; Б – наявність матеріалу на стрічці
Необхідно відмітити, що типове рішення автоматизації стрічкового транспортера під час переміщення штучних вантажів аналогічні, але в якості регулюючої величини в цьому випадку необхідно прийняти кількість одиниць вантажу в одиницю часу, а регулюючий вплив здійснювати коректуванням роботи навантажувальних пристосувань.
Читайте також:
- H) інноваційний менеджмент – це сукупність організаційно-економічних методів управління всіма стадіями інноваційного процесу.
- II. Поняття соціального процесу.
- IV. План навчального процесу.
- L2.T4. Транспортування рідких, твердих та газоподібних речовин.
- L2.T4/1.1. Засоби періодичного транспортування штучних матеріалів.
- L2.T4/1.2. Засоби безперервного транспортування матеріалів. Транспортери.
- L2.T4/1.3. Засоби дозування сипучих матеріалів.
- L2.T4/1.Переміщення твердих речовин по території хімічного підприємства.
- L3.T4/2. Засоби переміщення рідин.
- А. Особливості диференціації навчального процесу в школах США
- А. Особливості диференціації навчального процесу в школах США
- Автоматизація банківської діяльності в Україні
| <== попередня сторінка | | | наступна сторінка ==> |
| Лекція 2. Автоматизація механічних процесів | | | Автоматизація процесу дозування твердих матеріалів |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |