РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Лабораторна робота №5
Тема: Універсальний програмний комплекс для диспетчерських систем автоматизованого управління транспортними засобами (ДСАУ ТЗ) з використанням глобальних супутникових навігаційних систем.
Мета роботи: Вивчити структуру і функціональні можливості універсального програмного комплексу ДСАУ ТЗ та набути навичок роботи з його програмними засобами.
1. Призначення програмного комплексу:
· контроль і управління вантажними і пасажирськими перевезеннями у містах і регіонах, включаючи міжнародне сполучення;
· моніторинг і оперативне управління спеціальними транспортними засобами (пожежна охорона, швидка допомога, МНС);
· охорона, контроль руху і стану транспортних засобів, що перевозять особливо цінні та небезпечні вантажі, а також VIP пасажирів;
· контроль і управління рухомими і стаціонарними об’єктами в аеропортах, морських портах, залізничних станціях і перегонах;
· організація “домашнього моніторингу” руху і стану невеликої кількості транспортних засобів (особистий транспорт або невеличке транспортне підприємство);
· системи особистої безпеки на базі мобільних телефонів з GPS приймачем.
2. Структура програмного комплексу:
Структура програмного комплексу у найбільш повному варіанті реалізації відповідає так званій розподіленій ДСАУ ТЗ (рис.5.1), яка передбачає:
· децентралізований прийом навігаційної і службової інформації від підконтрольних транспортних засобів;
· централізоване накопичення прийнятої від ТЗ інформації у базі даних головного серверу (серверу мобільних об’єктів);
· віддалений доступ до баз даних головного і картографічного сервера по мережі Інтернет.
 |
Рис. 5.1 Структурна схема розподіленої ДСАУ ТЗ
Згідно наведеної схеми ДСАУ ТЗ програмний комплекс системи повинен включати:
1) Базове програмне забезпечення – операційна система Windows (Unix);
2) Центральну базу даних під управлінням систем MS Access, MySQL, Oracle;
3) Базу електронних карт місцевості;
4) Клієнтське програмне забезпечення для АРМ диспетчерів та віддалених робочих терміналів;
5) Комунікаційні мережені протоколи, необхідні для забезпечення надійного обміну інформацією між елементами системи TCP/IP, IPX.
3. Функціональні можливості системи:
1. Моніторинг руху транспортного засобу або групи ТЗ в автоматичному і ручному режимі на електронній карті.
2. Надання користувачу максимально можливої довідкової інформації про стан мобільного об’єкту і вантажу в режимі реального часу.
3. Розподіл прав доступу до функціональних можливостей серверу мобільних об’єктів в залежності від привілеїв конкретного абонента (спостереження у реальному часі, доступ до архіву, передача команд управління тощо).
4. Передача різних команд управління на рухомий об’єкт (зміна інтервалу визначення координат, блокування двигуна, постановка на сигналізацію та інш.)
5. Дистанційне програмування обладнання (встановлення охоронної зони, припустимого маршруту руху, обмеження швидкості та інш.)
6. Використання режиму “чорний ящик” для запису інформації на спеціальний запам’ятовуючий пристрій з послідуючим переглядом на електронній карті, аналізом і складанням звітності.
7. Запис усіх дій з транспортним засобом для проведення їх подальшого аналізу.
8. Контроль стану датчиків, окремих пристроїв транспортних засобів.
9. Управління діями транспортних засобів у випадку їх викрадення.
10. Побудова проектних маршрутів руху транспортних засобів, обмежувальних зон і меж, про порушенні яких інформується диспетчерський центр.
11. Проектування графіків руху транспортних засобів.
12. Розширені сервісні функції для роботи з картографічними даними:
– вимір відстані;
– пошук на місцевості (дома, вулиці, міста і т.д.)
– управління відображенням окремих шарів карти;
– створення різних “схем” відображення;
– повний доступ до сервісів “картографічної мережі”(розміщення власних шарів, зміна кольорів карт та інш.);
13. Встановлення параметрів контролю за проходженням транспортними засобами “контрольних точок” і дій у випадку відхилень від маршруту або графіка руху, а також виникнення позаштатних ситуацій.
14. відображення повної інформації по кожному транспортному засобу (номер, координати, прізвище водія тощо)
15. Гнучка система інформаційного наповнення, структури і дизайну звітної документації різної складності в залежності від вимог користувача.
16. Ведення спеціальної бази даних, у якій зберігається інформація про:
– усі передані команди управління;
– результати виконання запитів і команд;
– помилки у роботі обладнання і системи зв’язку;
– позаштатні ситуації.
17. Зручний механізм доступу до архіву пересування мобільних об’єктів:
– перегляд архіву за встановлений період часу;
– перегляд архіву як одного об’єкту, так і групи об’єктів одночасно;
– прискорений режим перегляду записів;
18. Використання карт різного масштабу на одному екрані при відображені багатьох транспортних засобів.
19. Автоматична зміна карт при переході з одного масштабу карти на інший, наприклад, при в’їзді з приміської території у місто.
20. Автоматичне завантаження електронних карт з картографічного сервера, що знаходиться у мережі Інтернет.
21. Вбудована база даних дозволяє створювати таблиці довільної структури, створювати інтерфейс доступу до даних, їх створення і редагування.
22. Підтримка різних типів бортового обладнання.
23. Можливість роботи з різними типами мобільного зв’язку.
Функціональні можливості системи залежать від типу застосовуваного клієнтського обладнання і системи зв’язку.
Порядок виконання роботи:
1. Включити комп’ютер і після завантаження операційної системи, два рази клацнувши лівою кнопкою миші по ярлику Client Pro, який знаходиться на робочому столі Windows, запустити клієнтське програмне забезпечення.
2. Переглянути список наявних електронних карт клацнувши лівою кнопкою миші по піктограмі  або натиснувши Ctrl+N. *
або натиснувши Ctrl+N. *
3. Вибрати з переліку потрібну карту і розпочати з нею працювати (рис.5.2, 5.3):
· переміщувати карту за допомогою піктограми рука  ;
;
· змінювати масштаб за допомогою інструменту лупа 
 або повзунка
або повзунка  у режимі довільного та фіксованого масштабу ;
у режимі довільного та фіксованого масштабу ;
· здійснювати пошук стаціонарних об’єктів на місцевості (населених пунктів, вулиць, будинків, автостанцій тощо) за допомогою інструменту бінокль  ;
;
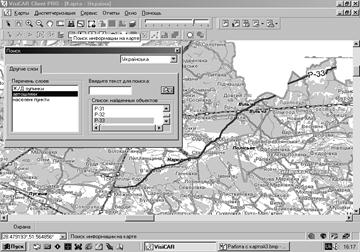
Рис. 5.2 Пошук об’єктів на місцевості
· вимірювати відстані між об’єктами на картах використовуючи інструмент лінійка  (виміряти відстань між входами на ст. метро Арсенальна і НТУ);
(виміряти відстань між входами на ст. метро Арсенальна і НТУ);
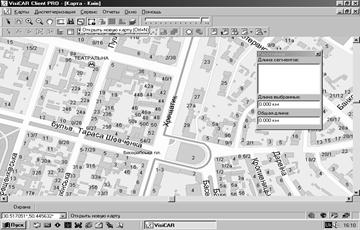
Рис. 5.3 Вимірювання відстані між об’єктами на карті
4. Завантажити декілька карт і працювати з ними по-черзі, активуючи потрібні вікна (рис. 5.4):
· відкрити список наявних карт (кнопка  ) і завантажити спочатку карту України;
) і завантажити спочатку карту України;
· потім завантажити карту Києва, змінити масштаб відображення карти;
· знайти м. Запоріжжя на карті України за допомогою інструменту  , не закриваючи при цьому карту Києва. Для того щоб на екрані відображалися одночасно декілька карт необхідно вибрати у меню Вікно ->Каскад або Вікно -> Упорядкувати...
, не закриваючи при цьому карту Києва. Для того щоб на екрані відображалися одночасно декілька карт необхідно вибрати у меню Вікно ->Каскад або Вікно -> Упорядкувати...
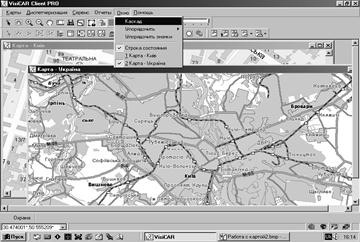
Рис. 5.4 Робота з двома картами
5. Переглянути перелік доступних мобільних об’єктів клацнувши лівою кнопкою миші по піктограмі  або натиснувши Ctrl+O *(рис. 5.5).
або натиснувши Ctrl+O *(рис. 5.5).
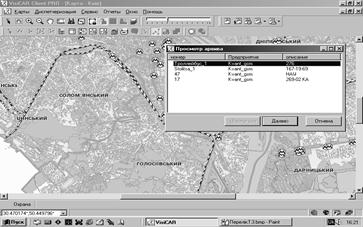
Рис. 5.5 Список доступних мобільних об’єктів
6. Переглянути архів переміщень об’єкта (групи об’єктів) за визначений період часу клацнувши лівою кнопкою миші по піктограмі  або натиснувши Ctrl+4 (рис. 5.6 - 5.9):
або натиснувши Ctrl+4 (рис. 5.6 - 5.9):
· змінити масштаб карт і швидкість перегляду архівних записів переміщень об’єктів, натиснувши на піктограму  (рис.5.6);
(рис.5.6);
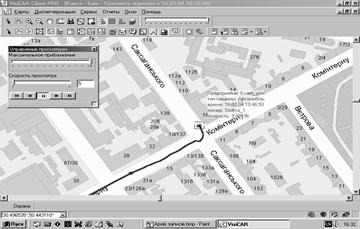
Рис. 5.6 Перегляд архівних записів переміщень транспортних засобів
* Перегляд переліку доступних мобільних об’єктів, архіву отриманої від них навігаційної і службової інформації можливий лише після того, коли клієнтська програма встановить з’єднання з сервером мобільних об’єктів (за 5-10 с. після її запуску), про що свідчить піктограма  у правому нижньому куті вікна програми.
у правому нижньому куті вікна програми.
· змінити обсяг і склад інформації про об’єкти, що надається диспетчеру під час перегляду архіву, натиснувши на піктограму  (рис.5.7);
(рис.5.7);
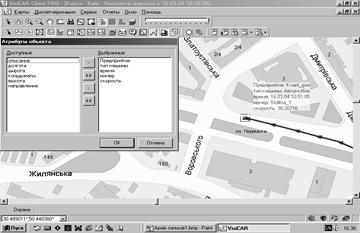
Рис. 5.7 Відображення інформації про мобільні об’єкти
· встановити режим відображення пройденого об’єктом шляху (піктограма “ламана лінія”  );
);
· встановити режим перегляду руху об’єкту з постійним його знаходженням у центрі;
· одночасно переглянути переміщення одного і того ж об’єкту на різних картах місцевості. Для цього треба обрати декілька карт при завантаженні архівної інформації про переміщення об’єктів, натиснувши на піктограму (рис.5.8);
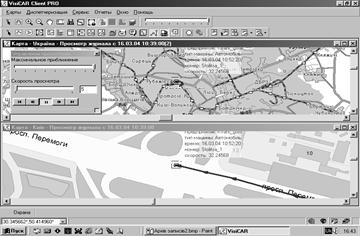
Рис. 5.8 Перегляд переміщень об’єкту одразу на двох різних картах.
· визначити останнє положення об’єкту (групи об’єктів) в архіві (піктограма  ).
).
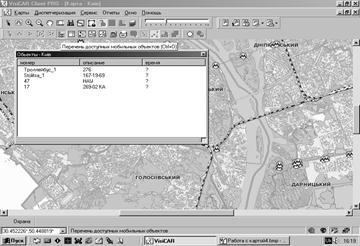
Рис. 5.9 Визначення останнього положення рухомого об’єкту
7. Переглянути архів подій, що сталися з об’єктом (групою об’єктів) за визначений період часу, клацнувши лівою кнопкою миші на піктограмі  або натиснувши Ctrl+6 (рис. 5.10).
або натиснувши Ctrl+6 (рис. 5.10).
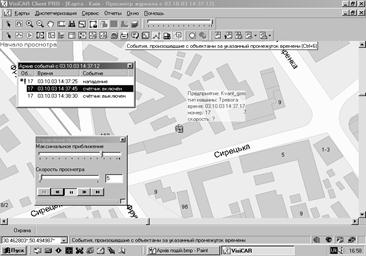
Рис. 5.10 Перегляд архіву подій
8. Робота з рухомими об’єктами у режимі реального часу:
· визначити місцезнаходження об’єкту (групи об’єктів) – піктограма  ;
;
· розпочати спостереження за об’єктом (групою об’єктів) – піктограма  (для того щоб карта автоматично переміщувалась за контрольованими об’єктами, піктограма
(для того щоб карта автоматично переміщувалась за контрольованими об’єктами, піктограма  повинна бути натиснута)
повинна бути натиснута)
· віддати команду обраному об’єкту (групі об’єктів) – іконка  .
.
9. Створення планів автоматизації і технологічних схем реагування (рис. 5.11, 5.12):
· задати план автоматичного спостереження за об’єктом (групою об’єктів). Для цього треба знайти у головному меню Диспетчеризація > План > Редактор... і створити новий план.
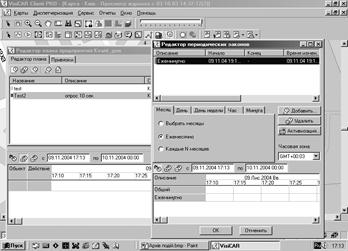
Рис. 5.11 Редактор планів автоматичного управління рухомими об’єктами
При створені плану автоматизації умовою виконання певних дій по відношенню до підконтрольного об’єкту (визначення місцезнаходження ТЗ, перевірка технічного стану його агрегатів за показами бортових датчиків, контроль температури у вантажному відсіку, перемикання реле тощо) є періодичний закон, що обирається диспетчером відповідно до виробничих завдань та безпеки перевезень. Програмне забезпечення дозволяє диспетчеру створювати як досить прості періодичності, так і плани підвищеної складності, що об’єднують декілька простих. Кожен із створених планів може бути застосований як до однієї рухомої одиниці так і до численних груп транспортних засобів.
· розробити технологічну схему реагування на визначену подію, що може трапитись з об’єктом. Для цього треба знайти у головному меню Диспетчеризація > Автоматизація > Редактор... істворити нову схему автоматизації.
Створення технологічної схеми автоматичного реагування здійснюється за допомогою графічного редактора (Рис. 5.12) і передбачає завдання конкретної умови (групи умов чи подій), що може мати місце і впливати на мобільний об’єкт, який знаходиться під контролем. Очевидно, що в процедурі автоматичного реагування приймають участь тільки ті події, які можуть бути зафіксованими бортовою апаратурою підконтрольного об’єкту. Перелік таких подій представлений у меню Редактор->Події. Кожна з них позначена значком або має свій номер.
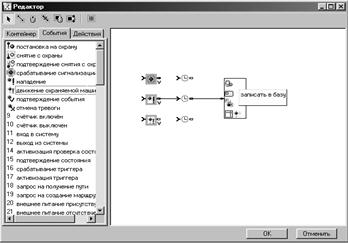
Рис. 5.12 Графічний редактор схем автоматичного реагування на події
Для того щоб створити схему автоматичного реагування спочатку необхідно у вікні Контейнер обрати “контейнер для умов” і перетягнути його справа на білий фон. Далі у вікні Події треба обрати потрібну умову і перенести її у порожній контейнер на білому фоні. Таким чином, можна задати ще декілька умов, розмістивши їх усіх в одному контейнері або кожну в окремому (рис.5.13).
Далі потрібно у вікні Контейнер обрати “контейнер для дій” і розмістити його на білому фоні праворуч від контейнерів з умовами. Потім з вікна Дії обрати дію (групу дій), яка буде здійснюватись у разі виконання умови (групи умов), та перенести її праворуч у порожній “контейнер для дій”.
Існує можливість встановлення таймера, що визначає інтервал реагування між моментом виникнення (фіксації) заданої умови (події) та моментом виконання відповідної дії. Для цього між контейнером для умов та контейнером для дій встановлюється значок із зображенням годинника (обирається у меню Контейнер) і задається необхідний інтервал реагування.
Для завершення та збереження у базі даних нової схеми автоматичного реагування потрібно з’єднати усі контейнери між собою наскрізною зеленою лінією і натиснути ОК.
Аналогічно планам автоматизації кожна створена схема автоматичного реагування на подію може бути застосована як для управління поодинокими рухомими об’єктами, так і численними групами об’єктів.
10. Формування і видача звітної документації:
· створення нових звіту, завантаження і редагування створених звітів, а також їх друк на принтері здійснюється за допомогою піктограм  або безпосередньо через головне меню Звіти;
або безпосередньо через головне меню Звіти;
Клієнтське програмне забезпечення надає диспетчеру широкі можливості по створенню довідково-звітної документації різної форми та змісту (рис.5.13).
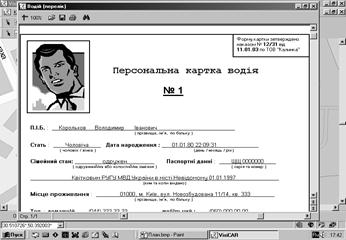
Рис. 5.13 Приклад довідково-звітної документації
Зміст звіту:
1. Тема і мета лабораторної роботи;
2. Структурна схема універсального програмного комплексу ДСАУТ;
3. Основні функціональні можливості програмного комплексу;
4. Висновки.
Контрольні запитання:
1. Визначити призначення ДСАУ ТЗ і перелічити основні задачі, що вирішуються її засобами;
2. Описати структуру апаратно-програмного комплексу ДСАУ ТЗ;
3. Визначити функціональні можливості універсального програмного комплексу ДСАУ ТЗ.
4. Що являє собою плани автоматизації та технологічні схемами реагування ?
Читайте також:
- II. Будова доменної печі (ДП) і її робота
- II. Самостійна робота студентів.
- IV. ВИХОВНА РОБОТА В КЛАСІ
- IV. ІНДИВІДУАЛЬНА РОБОТА СТУДЕНТІВ.
- IV. Науково-дослідницька робота.
- IV. Практична робота.
- IV. Робота над темою уроку
- Qорганізаційне середовище, в якому виконується робота
- V. Робота з підручником
- V. Робота з підручником. с. 59-60
- V. Робота з програмою «Виконавець Восьминіжка»
- V. Робота з програмою «Виконавець Садівник».
| <== попередня сторінка | | | наступна сторінка ==> |
| Загальні можливості програмного забезпечення АСДУ НТ. | | | Лабораторна робота №6 |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |