РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Електродвигуни постійного струму
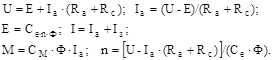
Основні умови роботи електродвигунів виражаються рівняннями рівноваги ЕРС і моментів:

| (6.1) |
У загальному випадку гальмовий момент на валу електродвигуна складається:
а) із моменту не навантаженого ходу Мo,створюваного зовнішніми силами тертя;
б) з моменту навантаження Мнв,створюваного зовнішніми силами;:
в) моменту Мj,створюваного силами інерції обертових частин при несталому режимі роботи електродвигуна.
Під час пуску, гальмуванні чи регулюванні частоти обертання електродвигуна під навантаженням рівняння рівноваги моментів запишеться у такий спосіб:

| (6.2) |
Якщо режим роботи електродвигуна сталий, тобто n = const, то  (J — момент інерції якоря) і рівняння рівноваги моментів приймає вид:
(J — момент інерції якоря) і рівняння рівноваги моментів приймає вид:

| (6.3) |
При не навантаженому ході електродвигуна рівняння рівноваги моментів виражається рівністю М=М0.
Електродвигуни при переході з одного режиму на іншій працюють стійко без допомоги яких-небудь спеціальних регуляторів, тобто вони саморегулюються. Дійсно, якщо навантаження на валу електродвигуна збільшиться, тобто виявиться, що Мг>М, то частота обертання п електродвигуна зменшиться. Зменшення частоти обертання веде до зменшення й зворотної ЕРС Е=СепФ, а це, у свою чергу, до зростання сили струму Iа і, як наслідок, до збільшення обертального моменту М = См·Ф·Iа. Таким чином, знову відновлюється рівновага моментів. Навпаки, при зменшенні навантаження на електродвигун частота обертання й зворотна ЕРС збільшуються, а сила струму якоря й обертальний момент зменшуються. Іншими словами, із зміною гальмового моменту автоматично змінюється обертаючий момент машини.
Суму моментів Мo і Мнв називають статичним моментом, а момент Мj — динамічним.
Керування електродвигунами.Керування електродвигунами постійного струму включає комплекс операцій: пуск і зупинку, регулювання частоти обертання, реверс і гальмування. Усі ці операції можуть виконуватися за допомогою ручних і автоматичних апаратів.
Пуск електродвигунів в основному здійснюється за допомогою пускового реостата (рис. 6.2,а). При цьому сила пускового струму визначається формулою:

| (6.4) |
де Rп – опір пускового реостата, що підбирається таким чином, аби сила пускового струму не перевищував значень Iп =(1,5 -2, 0) Iн.
При вмиканні електродвигуна у мережу його якір починає обертатися, поступово збільшуючи частоту обертання, у результаті чого зворотна ЕРС починає зростати. Опір пускового реостата плавно виводять і, наприкінці пуску, зовсім вимикають із ланцюга якоря. При цьому зворотна ЕРС досягає значення, близького до напруги мережі, а сила струму зменшується до номінальної. На рис. 6.2,6 представлені криві пускової сили струму й частоти обертання. Оскільки пусковий реостат має кілька ступіней, те і зміна пускової сили струму відбувається ступінями. Відповідно ступіням зміни сили струму буде змінюватися й частота обертання якоря, досягаючи наприкінці пуску свого сталого значення. Пуск електродвигунів значно поліпшується, якщо він відбувається при максимальному магнітному потоці. Для цього опір реостата у ланцюзі збудження перед пуском цілком виводять.
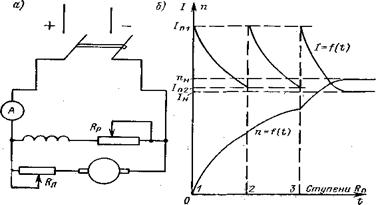
Рис. 6.2. Схема пуску (а) і пускові характеристики (б) електродвигуна
Для зупинки електродвигуна швидко вводять опір пускового реостата і відмикають схему від джерела живлення.
Частоту обертання електродвигунів, як випливає з рівняння:

| (6.5) |
можна регулювати шляхом зміни напруги джерела живлення або спадання напруги в ланцюзі якоря, або магнітного потоку електродвигуна. Перший спосіб застосовується тільки у спеціальних установках, що дозволяють регулювати U. Другий і третій способи можливі у звичайних установках, що мають постійну напругу джерела живлення.
Спадання напруги у ланцюзі якоря змінюють регулювальним реостатом, ввімкнутим послідовно у ланцюг якоря. Реостат дозволяє регулювати частоту обертання убік зниження від номінальної. Магнітний потік в електродвигунів змінюють регулювальним реостатом (мал. 6.2,6) у ланцюзі збудження. Цей спосіб дозволяє регулювати частоту обертання убік підвищення.
Реверс електродвигунів можна здійснити зміною напрямку струму в обмотці збудження при незмінному напрямку струму в якорі чи зміною напрямку струму в якорі при незмінному напрямку в обмотці збудження. Якщо ж одночасно змінити напрямок струму в якорі й в обмотці збудження, то напрямок обертання якоря залишиться попереднім.
Гальмування електродвигунів може бути: а) механічне за допомогою колодкових чи дискових гальм; б) реостатне, коли якір машини відключається від мережі й замикається на реостат визначеного опору; в) рекуперативне з віддачею енергії в мережу, здійснюване переведенням машини у режим генератора; г) зворотнім вмиканням, яке виконується шляхом зміни напрямку струму в якорі електродвигуна, тобто зміни полярності живлення обмотки якоря, чи за допомогою виконавчого механізму, що переводить машину у режим генератора.
Характеристики електродвигунів. Властивості електродвигунів постійного струму оцінюються за так званими робочими й регулювальними характеристиками. Робочі характеристики являють собою залежності п, М, I і n від Р2 при U=const і Rз=const, де п – частота обертання електродвигуна; М – обертаючий момент на валу електродвигуна; I — сила струму, споживаного електродвигуном з мережі; η – ККД електродвигуна; Р2 – корисна потужність електродвигуна.
Тому що Р2=U· I·η , тобто корисна потужність електродвигуна пропорційна силі струму, то робочі характеристики іноді представляють у виді залежностей п, М, Р2 і n від Iа при U=const і Rз= const
Характеристику n = f (Р2) часто називають зовнішньою характеристикою електродвигуна.
Під регулювальними характеристиками розуміють залежності виду n=f(Iв) при U=const. Ці характеристики визначають можливості регулювання частоти обертання електродвигунів.
Оцінка властивостей електродвигунів у загальному випадку відбувається також за допомогою механічних характеристик, які є залежностями п=f(М) при U=const і Rв = const. Ці характеристики використовуються при аналізі електричних приводів.
Електродвигун паралельного збудження. Принципова схема електродвигуна паралельного збудження приведена на рис. 6.3, а.
Для пуску електродвигуна необхідно ввімкнути автоматичний вимикач на мережу й плавно вивести опір пускового реостата Rп. Коли електродвигун досягне номінальної частоти обертання й перейде у сталий режим роботи, будуть виконуватися наступні співвідношення:

| (6.6) |
Аналіз співвідношень (6.6) показує, що сила струму збудження електродвигуна паралельного збудження не залежить від сили струму навантаження. Це значить, що при незмінній напрузі джерела живлення електродвигун працює практично з постійним магнітним потоком. Тому сила струму, споживана електродвигуном з мережі, і обертаючий момент, що розвивається їм, змінюються прямо пропорційно навантаженню на валі електродвигуна. Цю пропорційність підтверджують робочі характеристики М = f(Р2) і I=f(P2), приведені на рис. 6.3, 6. Невелике їхнє відхилення від прямолінійності порозумівається дією реакції, що розмагнічує, якоря.
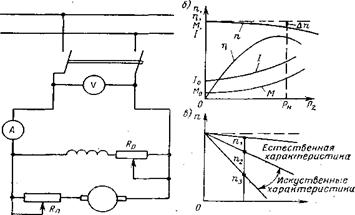
Рис. 6.3. Принципова схема електродвигуна
паралельного збудження та його характеристики
При постійних значеннях Uі Iз частота обертання п електродвигуна зі зміною навантаження також змінюється незначно [характеристика п = f(Р2) на рис. 6.3, 6]. Ця зміна, як видно з рівняння частоти обертання, викликається: а) збільшенням спадання напруги в якорі Iа Rа, що веде до зменшення частоти обертання; б) посиленням дії реакції якоря, що, розмагнічуючи машину, підвищує частоту обертання. Однак вплив спадання напруги перевищує дію реакції якоря. Тому частота обертання з ростом навантаження зменшується.
ККД електродвигуна, обумовлений виразом (5.20), із ростом Р2 спочатку підвищується, тому що при невеликому, але зростаючому, навантаженні сумарні втрати (в основному на тертя) практично залишаються постійними. При великому навантаженні різко зростають втрати в обмотці якоря й зростання ККД сповільнюється, а при перевантаженні ККД починає зменшуватися.
Механічна характеристика n=f(M) при IЗ = const, коли можна вважати Ф = const, являє собою пряму лінію, трохи нахилену до осі абсцис (рис. 6.3, в). Ця характеристика, як і зовнішня характеристика електродвигуна, є твердої. З уведенням у ланцюг якоря додаткового опору R твердість характеристики зменшується. Механічна характеристика при R = 0 називається природною. Тому що механічна характеристика спадаюча, то робота електродвигуна є стійкою.
Частоту обертання електродвигуна можна регулювати зміною або магнітного потоку, або величини напруги у ланцюзі якоря.
Таким чином, електродвигун паралельного збудження має наступні властивості: 1) частота обертання електродвигуна при коливаннях навантаження від нуля до номінальної змінюється мало; 2) електродвигун допускає регулювання частоти обертання в широких межах і, крім того, може працювати у не навантаженому режимі; 3) електродвигун розвиває обертаючий момент, пропорційний силі струму в якорі (Ф=const), і споживає з мережі струм, пропорційний навантаженню на валу; 4) для електродвигуна неприпустимий обрив ланцюга збудження, тому що в цьому випадку при роботі у не навантаженому режимі він піде "вразнос", а при роботі під навантаженням може згоріти обмотка якоря.
Електродвигун послідовного збудження.Принципова схема електродвигуна послідовного порушення приведена на рис. 6.4, а.
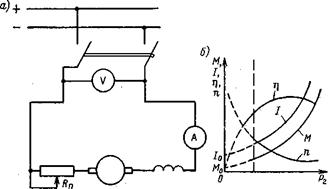
Рис. 6.4. Принципова схема електродвигуна послідовного збудження
та його робочі характеристики
При роботі електродвигуна в сталому режимі мають місце наступні співвідношення:
| (6.7) |
Магнітний потік машини, як випливає зі схеми й рівнянь, залежить від навантаження і, виходить, від сили струму якоря (Iз=Iн=Iа). При малих навантаженнях машина не насичена й магнітний потік пропорційний силі струму якоря: Ф = СФIЯ. У результаті обертаючий момент є пропорційний квадрату сили струму якоря:

| (6.8) |
Тому при малих і середніх навантаженнях характеристика М = f(Р2) має вид параболи (рис. 6.4, 6). При великих навантаженнях машина насичується, унаслідок чого потік при збільшенні навантаження зростає незначно, ріст обертального моменту сповільнюється і його характеристика переходить майже у пряму лінію. Швидке зростання моменту у порівнянні з ростом сили струму якоря є важливою властивістю електродвигуна послідовного збудження.
Частота обертання електродвигуна змінюється обернено пропорційно магнітному потоку. Тому, що потік машини пропорційний силі струму якоря, із збільшенням навантаження частота обертання електродвигуна різко зменшується, а при зменшенні навантаження збільшується. Зовнішня характеристика n=f(Р2) має вид гіперболи (див. рис. 6.4, 6). Насичення машини обумовлює деяке відхилення характеристики від гіперболи.
Здатність електродвигуна послідовного збудження різко змінювати частоту обертання при зміні навантаження є характерною його особливістю. На не навантаженому ходу й при малих навантаженнях, коли сила струму в якорі й магнітний потік малі, частота обертання електродвигуна досягає великого значення, небезпечного для механічної міцності якоря. Тому для електродвигуна послідовного порушення передбачають такі умови, при яких пуск і робота на не навантаженому ходу чи при малому навантаженні (менш 25 % номінальної) виключаються.
Таким чином, електродвигун послідовного збудження має наступні властивості: 1) при змінах навантаження частота обертання електродвигуна різко міняється, тобто він має м'яку зовнішню характеристику; 2) електродвигун можна пускати у хід тільки під навантаженням; працювати електродвигун може також тільки під навантаженням; 3) при пуску під навантаженням і при перевантаженні електродвигун розвиває великий обертаючий момент і має малу частоту обертання.
Завдяки перерахованим властивостям електродвигуни послідовного порушення широко використовуються в піднімальних і транспортних установках. Їх застосовують як приводи лебідок, кранів і ліфтів, а також як тягові електродвигуни у транспортних засобах.
Електродвигун змішаного збудження.Принципова схема електродвигуна змішаного збудження приведена на рис. 6.4, а.
Електродвигуни даного типу мають основну обмотку збудження – паралельну чи послідовну – і допоміжну – відповідно послідовну чи паралельну, У більшості випадків обмотки збудження таких електродвигунів включають згідно, так щоб їхні магнітні потоки складалися. При такім з'єднанні мають місце наступні співвідношення:

| (6.9) |
Аналіз рівнянь (6.9) показує, що магнітні потоки, які створюються допоміжними обмотками, впливають на обертальний момент електродвигуна та частоту його обертання. Так, в електродвигунах, що мають у якості основної послідовну обмотку, незмінний магнітний потік паралельної обмотки обмежує зміну частоти обертання електродвигуна при зміні навантаження на валі. За наявності паралельної обмотки компаундний електродвигун послідовного збудження може працювати у не навантаженому режимі.
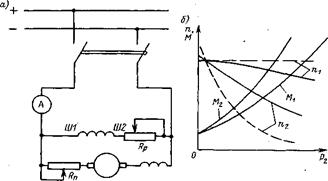
Рис. 6.4. Принципова схема електродвигуна змішаного порушення
і його робочі характеристики
В електродвигунах, що мають основну паралельну обмотку, невелика послідовна обмотка застосовується для підвищення пускового моменту, а також для компенсації реакції якоря й зм'якшення швидкісної характеристики машини. Така обмотка називається стабілізуючою.
На рис. 6.4, 6 показані робочі характеристики компаундних електродвигунів паралельного збудження (n1, М1) й послідовного збудження (п2, М2). Для порівняння приведені швидкісні характеристики (штрихові криві) при відсутності допоміжних обмоток у двигунів. Реверс електродвигунів змішаного збудження варто робити зміною напрямку струму якоря. Регулювання ж їхньої частоти обертання здійснюється так само, як і в електродвигунів паралельного збудження.
Читайте також:
- Автоматичне розвантаження по струму.
- Активний опір у ланцюзі синусоїдального струму
- Баланс потужностей у колі гармонічного струму.
- Безпечні методи звільнення потерпілого від дії електричного струму.
- Будова машин постійного струму
- В електронагрівачах використано одну з головних властивостей електричного струму - здатність нагрівати провідники.
- Величина густини зварювального струму
- Види двигунів постійного струму.
- Види електричних травм та дії електричного струму на людину.
- Вимiрювання постiйних струму та напруги
- Вимірювальні трансформатори струму і напруги
- Вимірювання електричної напруги і струму
| <== попередня сторінка | | | наступна сторінка ==> |
| Генератори постійного струму | | | Загальні відомості й поняття |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |