РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Приклад висновків
З отриманих графік можна зробити висновок, що залежність диференціальних виправлень від часу характеризується більшою залишковою похибкою ніж залежність від відстані. Але як показали лінійні графіки похибок апроксимації точності диференціальних визначень навпаки залежність похибки від відстані є більш достовірною ніж така залежність від часу. Загальна залишкова похибка диференціальних визначень при віддаленні об’єкта від ККС на 303 км складає 2,83 м., а при затримці надходження виправлення від ККС на 25 сек. – 2,45 м. У будь-якому випадку для зменшення залишкових похибок важливо забезпечити високонадійні і швидкі канали зв’язку для передачі диференціальних виправлень.
Графіки залежностей радіальних похибок від часу мають нелінійний характер. Порівнюючи характеристики радіальних помилок систем ГЛОНАСС і GPS, помилка в системі ГЛОНАСС є меншою ніж у системі GPS, якщо вона використовує загрублений сигнал селективного доступу.
Лабораторна робота №4
Тема: Автоматизована система диспетчерського управління наземним транспортом (АСДУ НТ) з використанням ГНСС і сучасних засобів телекомунікацій.
Мета роботи: Вивчити функціональний склад і принципи побудови обладнання диспетчерської системи автоматизованого управління транспортом, з’ясувати особливості функціонування АСДУ Т при вирішенні задач диспетчерського контролю і управління транспортними засобами.
1. Призначення системи:
Запропонована система управління призначена для забезпечення:
• автоматизованого комплексного рішення виробничих задач диспетчерського керування автомобільним транспортом;
• контролю за рухом і місцем розташування транспортних засобів;
• підвищення безпеки пасажирів в шляху проходження, включаючи оперативне визначення місць дорожньо-транспортних випадків, підвищення оперативності при наданні медичної допомоги та евакуації потерпілих;
• проведення заходів щодо лінії МНС і мобілізаційної готовності.
Диспетчерська система автоматизованого управління автотранспортом повинна бути частиною АСУміського (районного) господарства.
2. Структура АСДУ НТ:
Автоматизована система диспетчерського управління наземним транспортом складається з таких основних частин (див. структурну схему - рис. 4.1.):
• апаратури транспортного засобу (мобільна станція);
• апаратури диспетчерської станції (базова станція);
• підсистеми зв'язку (телекомунікаційні пристрої та відповідні канали зв’язку);
• підсистеми обробки й відображення навігаційних даних та управління апаратурою системи (ПК диспетчерів із спеціальним програмним забезпеченням).
У свою чергу апаратура транспортного засобу складається з приймально-передавального пристрою, навігаційного приймача і контролера, що забезпечує електричний зв'язок цих двох пристроїв і таким чином поєднує їх у єдиний пристрій.
Апаратура диспетчерської станції складається з приймально-передавального пристрою, персонального комп'ютера і контролера. Контролер у цьому випадку забезпечує стикування приймально-передавального пристрою з комунікаційним портом (чи іншим входом / виходом) персонального комп'ютера та радіостанції.
У лабораторному стенді в якості підсистеми зв'язку використовується ультра короткохвильовий (УКХ) радіозв'язок, а приймально-передавальний пристрій являє собою радіостанцію УКХ діапазону.
3. Принцип дії АСДУ НТ:
Місце розташування транспортного засобу в АСДУ Т визначається за сигналами супутникових навігаційних систем ГЛОНАСС (Росія) і НАВСТАР (США), а в перспективі й системи GALILEO (Європа) і BEIDOU (Китай), за допомогою бортового навігаційного приймача, що входить до складу апаратури мобільного об'єкту (МО) (див.лаб.роб.№2). При цьому точність визначення координат МО складає 15-30 метрів. Далі ці координати через канал радіозв'язку разом з іншою службовою інформацією (бортові датчики МО) періодично передаються у диспетчерський центр (ДЦ). Для більш точного визначення місця МО можна використовувати опорну станцію диференціального режиму, що виробляє виправлення до координат (див. лаб.роб.№3). Координати транспортного засобу корегуються і відображаються на електронній карті місцевості, що завантажується на комп'ютер диспетчера (у цьому випадку точність визначення координат МО складе 1-3 метри).
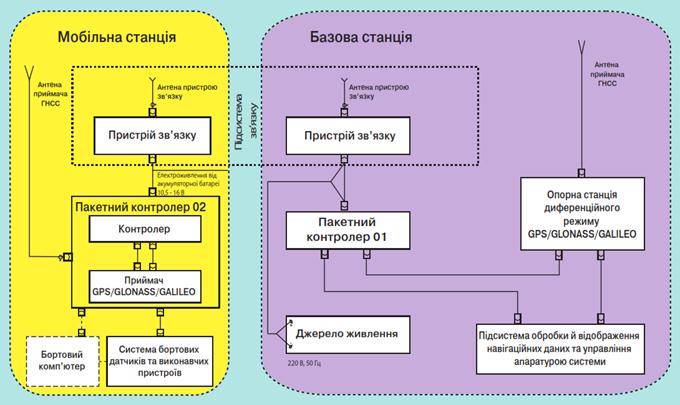
Рис. 4.1. Структурна схема автоматизованої системи диспетчерського управління наземним транспортом.
Читайте також:
- Абсолютні синоніми (наприклад, власне мовні й запозичені) в одному тексті ділового стилю вживати не рекомендується.
- Алгоритм однофакторного дисперсійного аналізу за Фішером. Приклад
- Аналіз структури та динаміки необоротних активів за даними Ф№1 «Баланс» (на прикладі ВАТ «Горизонт»)
- Базові та прикладні класифікації
- В Додатку до диплома (приклад)
- В процесі читання виділіть маркером або підкресліть приклади дії променів на живі організми.
- В чому полягає явище тунелювання через потенціальний бар’єр, наведіть приклади.
- Види аудиторських висновків
- Види аудиторських висновків
- Види аудиторських висновків та умови їх надання
- Визначення і приклади
- Виокремте з обраної програми концептуальну ідею, мету, наведіть 1-2 приклади форм і методів її реалізації.
| <== попередня сторінка | | | наступна сторінка ==> |
| Варіанти завдання до лабораторної роботи №3 | | | Використання сучасних систем мобільного радіозв’язку у АСДУ НТ. |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |