РЕЗОЛЮЦІЯ: Громадського обговорення навчальної програми статевого виховання
ЧОМУ ФОНД ОЛЕНИ ПІНЧУК І МОЗ УКРАЇНИ ПРОПАГУЮТЬ "СЕКСУАЛЬНІ УРОКИ"
ЕКЗИСТЕНЦІЙНО-ПСИХОЛОГІЧНІ ОСНОВИ ПОРУШЕННЯ СТАТЕВОЇ ІДЕНТИЧНОСТІ ПІДЛІТКІВ
Батьківський, громадянський рух в Україні закликає МОН зупинити тотальну сексуалізацію дітей і підлітків
Відкрите звернення Міністру освіти й науки України - Гриневич Лілії Михайлівні
Представництво українського жіноцтва в ООН: низький рівень культури спілкування в соціальних мережах
Гендерна антидискримінаційна експертиза може зробити нас моральними рабами
ЛІВИЙ МАРКСИЗМ У НОВИХ ПІДРУЧНИКАХ ДЛЯ ШКОЛЯРІВ
ВІДКРИТА ЗАЯВА на підтримку позиції Ганни Турчинової та права кожної людини на свободу думки, світогляду та вираження поглядів
- Гідрологія і Гідрометрія
- Господарське право
- Економіка будівництва
- Економіка природокористування
- Економічна теорія
- Земельне право
- Історія України
- Кримінально виконавче право
- Медична радіологія
- Методи аналізу
- Міжнародне приватне право
- Міжнародний маркетинг
- Основи екології
- Предмет Політологія
- Соціальне страхування
- Технічні засоби організації дорожнього руху
- Товарознавство продовольчих товарів
Тлумачний словник
Авто
Автоматизація
Архітектура
Астрономія
Аудит
Біологія
Будівництво
Бухгалтерія
Винахідництво
Виробництво
Військова справа
Генетика
Географія
Геологія
Господарство
Держава
Дім
Екологія
Економетрика
Економіка
Електроніка
Журналістика та ЗМІ
Зв'язок
Іноземні мови
Інформатика
Історія
Комп'ютери
Креслення
Кулінарія
Культура
Лексикологія
Література
Логіка
Маркетинг
Математика
Машинобудування
Медицина
Менеджмент
Метали і Зварювання
Механіка
Мистецтво
Музика
Населення
Освіта
Охорона безпеки життя
Охорона Праці
Педагогіка
Політика
Право
Програмування
Промисловість
Психологія
Радіо
Регилия
Соціологія
Спорт
Стандартизація
Технології
Торгівля
Туризм
Фізика
Фізіологія
Філософія
Фінанси
Хімія
Юриспунденкция
Основи розрахунку елементів рульового керування на міцність.
Вихідною величиною для розрахунку елементів рульового керування є момент опору керованих коліс  нерухомого автомобіля
нерухомого автомобіля
 (4) де
(4) де
 - момент опору коченню керованих коліс,
- момент опору коченню керованих коліс,  - момент опору ковзанню відносно опорної поверхні,
- момент опору ковзанню відносно опорної поверхні,  - стабілізуючий момент від поперечного нахилу шкворня.
- стабілізуючий момент від поперечного нахилу шкворня.
 де
де
 - сила тяжіння, що припадає на керовані колеса, f – коефіцієнт опору коченню, С- радіус повороту ( радіус обкочування ) керованого колеса.
- сила тяжіння, що припадає на керовані колеса, f – коефіцієнт опору коченню, С- радіус повороту ( радіус обкочування ) керованого колеса.
 де
де
 - коефіцієнт зчеплення шин из поверхнею полотна дороги,
- коефіцієнт зчеплення шин из поверхнею полотна дороги,
 - радіус ковзання ( плече прикладання сумарної сили тертя шини об полотно дороги відносно осі шкворня).
- радіус ковзання ( плече прикладання сумарної сили тертя шини об полотно дороги відносно осі шкворня).
 де
де
 - кут нахилу шкворня в поперечній площині, рад.
- кут нахилу шкворня в поперечній площині, рад.
 та
та  -кути повороту зовнішнього та внутрішнього керованих коліс, рад.
-кути повороту зовнішнього та внутрішнього керованих коліс, рад.
 - сила тяжіння, котра передається безпосередньо на дорогу (не через шкворневе з’єднання). При інженерних розрахунках приймають
- сила тяжіння, котра передається безпосередньо на дорогу (не через шкворневе з’єднання). При інженерних розрахунках приймають 
З урахуванням вище наведенного

Зусилля, яке необхідно прикласти до рульового колеса для повороту керованих коліс нерухомого автомобіля,
 де
де
 - радіус рульового колеса,
- радіус рульового колеса,  - кінематичне передаточне число рульового керування,
- кінематичне передаточне число рульового керування,  - коефіцієнт корисної дії рульового привода.
- коефіцієнт корисної дії рульового привода.
Обід рульового колеса, як правило, на міцність не розраховують. Спиці рульового колеса розраховують на згин. Рульовий вал розраховують на скручування в місці кріплення ведучої ланки рульової передачі.
Елементи зачеплення рульової передачі розраховують на міцність по напругах згину  та на зношування по контактних напругах стиску
та на зношування по контактних напругах стиску  .
.
Для зачеплення типу “ глобоїдний черв’як – ролик “

Рис 30. Рульовий механізм типу «глобоїдний
черв’як-ролик » без посилювач.
1- ролик, 2- черв’як.
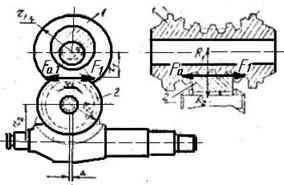
Рис 31. Схема сил, що діють у рульовій передачі
типу “ глобоїдний червяк – ролик”.
 , (5) де
, (5) де
 - осьова сила, що діє на гребені ролика та витка черв’яка ,
- осьова сила, що діє на гребені ролика та витка черв’яка ,  - площа контакту,
- площа контакту,
 де
де
 - колова сила , що діє на контакті зачеплення,
- колова сила , що діє на контакті зачеплення,  - кут підйому гвинтової лінії черв’яка.
- кут підйому гвинтової лінії черв’яка.
З умови однаковості моментів , що діють на рульовий вал з боку рульового колеса та з боку черв’яка  , одержуємо
, одержуємо
 . (6)
. (6)
Тоді  . (7)
. (7)
Площа контакту матиме вигляд

 де
де
 - центральні кути секторів черв’яка та ролика, що знаходиться в зачепленні,
- центральні кути секторів черв’яка та ролика, що знаходиться в зачепленні,  - зовнішні радіуси черв’яка та ролика,
- зовнішні радіуси черв’яка та ролика, - кількість гребенів ролика, які знаходяться в зачепленні.
- кількість гребенів ролика, які знаходяться в зачепленні.
Підставивши в значення та в попереднє рівняння 5, отримаємо

У рульової передачі типу “гвинт – гайка – рейка – сектор” сили  та , що діють у гвинтовій парі, знаходять з рівнянь 6,7
та , що діють у гвинтовій парі, знаходять з рівнянь 6,7
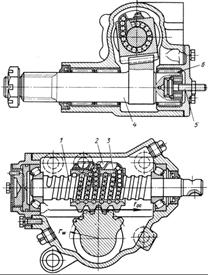
Рис 32. Рульовий механізм “ гвинт – гайка – рейка – сектор “.
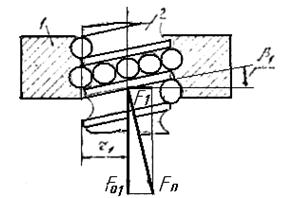
Рис 33. Схема сил, які діють в парі “ гвинт – гайка “.
Напруги стискання в парі “ кулька – поверхня канавки “знаходять з рівняння
 де
де
 - коефіцієнт кривизни дотичних поверхонь,
- коефіцієнт кривизни дотичних поверхонь, 
 - модуль пружності матеріалу , для сталі
- модуль пружності матеріалу , для сталі ;
;  - діаметр кульки;
- діаметр кульки;  - діаметр канавки гвинта ( гайки );
- діаметр канавки гвинта ( гайки );  - кількість кульок, які знаходяться одночасно в нарізці гвинта та в канавці гайки;
- кількість кульок, які знаходяться одночасно в нарізці гвинта та в канавці гайки;  - кут контакту кульок,
- кут контакту кульок,  .
.
Напруги згину в зуб’ях сектора:
 де
де
 - колове зусилля, котре діє на зуб’я сектора;
- колове зусилля, котре діє на зуб’я сектора;  - кутове передаточне число рульової передачі;
- кутове передаточне число рульової передачі;  -радіус первісного кола зуб’їв сектора.
-радіус первісного кола зуб’їв сектора.
 - коефіцієнт форми зуба;
- коефіцієнт форми зуба;  - довжина зуба сектора;
- довжина зуба сектора;  - крок зуб’їв сектора;
- крок зуб’їв сектора;
 - коефіцієнт перекриття зуб’їв.
- коефіцієнт перекриття зуб’їв.
У тому випадку, коли силовий пристрій підсилювача суміщений рульовою передачею, величину  знаходять з виразу
знаходять з виразу
 , де
, де
Де  - тиск рідини в системі підсилювача;
- тиск рідини в системі підсилювача;  - внутрішній діаметр циліндра силового пристрою підсилювача.
- внутрішній діаметр циліндра силового пристрою підсилювача.
Контактні напруги  на поверхні зуб’їв підраховують за відомим виразом Біляєва – Герца .
на поверхні зуб’їв підраховують за відомим виразом Біляєва – Герца .
В рульовій передачі “черв’як – сектор” з боковим розташуванням сектора, напруги згину визначають для зуб’їв сектора:
 де
де
 - колове зусилля , що діє на зубя сектора ,
- колове зусилля , що діє на зубя сектора , 
 - радіус первісного кола черв’яка;
- радіус первісного кола черв’яка;  - кути спіралей нарізки витків черв’яка та зуб’їв сектора; - коефіцієнт форми зуба;
- кути спіралей нарізки витків черв’яка та зуб’їв сектора; - коефіцієнт форми зуба;  - модуль
- модуль
( нормальний ) по первісному обводу;  - довжина зуба сектора;
- довжина зуба сектора;  - коефіцієнт перекриття;
- коефіцієнт перекриття;  - кількість заходів черв’яка.
- кількість заходів черв’яка.
Контактні напруги на зуб’ях сектора:
 де
де
 - кут зачеплення;
- кут зачеплення;  - еквівалентні первісні радіуси черв’яка та зуб’їв сектора.
- еквівалентні первісні радіуси черв’яка та зуб’їв сектора.
Вал сошки руля розраховують на напругу кручення:
 де
де
 - передаточне число рульової передачі;
- передаточне число рульової передачі;  - момент опору крученню рульової сошки.
- момент опору крученню рульової сошки.
Якщо силовий пристрій підсилювача сумісний з рульовою передачею, то
Напруга кручення  де
де
 - радіус прикладення скручувального зусилля до вала сошки руля
- радіус прикладення скручувального зусилля до вала сошки руля
( наприклад, радіус первинного обводу зуб’їв сектора ).
Напруги кручення не повинні перевищувати 350 МПа. Рульову сошку розраховують на згин та на кручення відносно повздовжньої осі.
Тяги та важелі рульового привода розраховують на міцність з умови повороту керованих коліс нерухомого автомобіля та гальмування з максимальною інтенсивністю.
Поперечну та повздовжню рульові тяги розраховують за запасом стійкості  повздовжньому згину
повздовжньому згину
 де
де
 - критична напруга ( при ній порушується повздовжня стійкість ),
- критична напруга ( при ній порушується повздовжня стійкість ),
 - напруга стиску.
- напруга стиску.
Поворотний важіль розраховують на згин в місці запресування важеля та на небезпечному перерізі, а бокові важелі трапеції – аналогічно.
Шарнірні з’єднання рульового привода розраховують на тиск між головкою кульового пальця та сухарями; ніжку пальця – на згин та зріз в місці запресування пальця в важелях та тягах.
При розрахунку підсилювача визначають геометричні параметри розподільника та силового циліндра, продуктивність насоса та умови сталої роботи рульового керування з підсилювачем.
Рульові керування з підсилювачем розробляють таким чином, щоб при відмові від роботи підсилювача зберігалася можливість безпечно керувати автомобілем.
Читайте також:
- A) правові і процесуальні основи судово-медичної експертизи
- D-тригер з динамічним керуванням
- II. За зміною ступенів окиснення елементів, які входять до складу реагуючих речовин
- R – розрахунковий опір грунту основи, це такий тиск, при якому глибина зон пластичних деформацій (t) рівна 1/4b.
- Автократично-демократичний континуум стилів керування.
- Автоматизація водорозподілу на відкритих зрошувальних системах. Методи керування водорозподілом. Вимірювання рівня води. Вимірювання витрати.
- Автоматизація меліоративних помпових стацій. Автоматизація керування помповими агрегатами.
- Агресивне керування портфелем акцій
- Активне управління інвестиційним портфелем - теоретичні основи.
- Алгоритм маркетингового розрахунку цін.
- Алгоритм розрахунку апаратів псевдозрідженого шару.
- Алгоритм розрахунку ризиків за загрозою відмова в обслуговуванні
| <== попередня сторінка | | | наступна сторінка ==> |
| Підсилювачі рульового керування. | | | Аналіз конструкції рульового керування. |
|
Не знайшли потрібну інформацію? Скористайтесь пошуком google: |
© studopedia.com.ua При використанні або копіюванні матеріалів пряме посилання на сайт обов'язкове. |